
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода 10.5] Самонастраивающиеся системы с использованием фуикпЕий чувствительности, дифференциальные и т. д. На рис. 10.36 приведена структуриая схема самонастраивающейся системы со вспомогательным операторснй. Здесь Wo (р, yi) - передаточнвя функция объекта с переменными параметрами у{(1= 1,2.....я); Wp = (р, Xi) - передаточная функция регулятора с настраиваемыми параметрами xi {(= 1,2, Рис. 10.36. Структурная схема самонастраивающейся системы с вспомогательным оператором. Если показателем качества является функция / погрешности е / = / (е), то ее производные по настраиваемым параметрам =. {df (г)1дб) (dbldxi) {i = 1.2, Так как задаюпшй сигнал не зависят от настраиваемых параметров, то de/dxj = = -Щ1дх1. С учетом ф = ИРр X (р, ж) Wo (р. находим откуда dXi 1-f Wo.(p,4r/)lp(p.*i) Выражение , W,i{p, Xi, Ui) Wo ip, yt) dWp (p, Xi)/dxt ° l + Wo(P. yi)Wj,(p. Xi) называют вспомогательным оператором. С его помощью удается вычислить составляющие вектора градиента показателя качества =-1в,(Р.....)е. Параметры регулятора х, настраиваются Sxi , df с помощью интеграторов - > где . Xi - коэффициенты усиления контуров самонастройки, от которых зависит быстродействие. Основные трудности, возникающие при реализации указанного алгоритма самонастройки, связаны с определением вспомогательных операторов. Анализ различных алгоритмов самонастройки приводится в 110.27]. Для того чтобы обеспечить стабильность динамических характеристик системы управлеиия, часто используется эталонная модель со стабильными желаемыми динамическими свойствами. Выходные сигналы, характеризующие динамическое состояние объекта управлеиия, сопоставляются с выходными сигналами эталонной модели. При наличии рассогласования вовиикает дополнительное управляющее воздействие, которое может ив-посредственно добавляться к входному сигналу , воздействующему через регулятор иа объект управлеиия (сигнальнвя свмоиастройка), или изменять пвраметры регулятора (параметрическая самонастройка). Структурная схема самонастраивающейся системы с эталонной моделью приведена на рис. 10.37. В такой системе выходы эталонной модели представляют собой желаемое зиачение выходного сигнала, его первой и второй производных. Выходной сигнал объекта управления (скорость двигателя ю), а также входной сигнал системы управлеиия подаются в устройство, называемое наблюдателем, иа выходе которого имеются первая и вторая производные выходного сигнала объекта управления. Выходные сигналы эталонной модели Юи = Юм и сё сравниваются с выходным сигналом объекта ю, а также полученными с помощью наблюдателя опенками первой и второй производных выходного сигнала ю я ю. Разностные сигналы в, е и е суммируются с весами ух, Уа и и образуют сигнал самонастройки, который через ограничннающее устройство подается иа вхЬд системы управления (контур сигнальной самонастройки), а также иа один из входов блока перемножения 2. На другой вход блока перемножения 2 подается линейная комбинация задающего сигнала Юз и выходного сигнала объекта. Выход блока перемножения 2 через интегратор подается иа блок перемножения /, изменяя тем самым коэффициент усиления регулятора скорости (контур параметрической самонастройки). Контур параметрической самонастройки компенсирует медленные изменения момента инершви механизма. Контур сигнальной самонастройки обладает более высойНм быстродействием и может компенсировать изменения параметров объекта, связанные с режимами работы тиристорного преобразователя. Методака расчета параметров контуров самонастройки и результаты исследования такой свмонастраивающейся системы приведены в {10.26]. Самонастраивающийся регулятор тока оказывает влияния на переходный процесс, для веитильиого электропривода постоянного связанный с изменением среднего значения TOta. В системах подчиненного регулирова- тока якорной цепи, так как в начале каждого ~3]Зmttлof>nIя модель 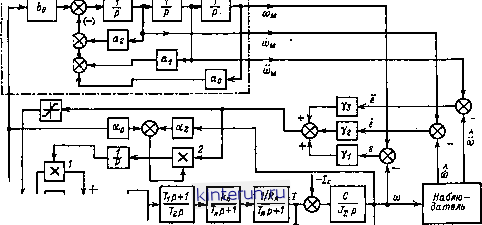 0 Рс HgHgK л Рнс. 14.37. Структурная схема саионастранвающейсн системы с этало иной моделью. ния быстродействие внутреннего контура интервала проводимости вентиля ток якоря (контура регулирования тока) существенно равеи нулю. зависит от режима работы вентильного ;е- Если регулятор тока настроен для работы образователя, питающего якорную цепь ЛДТ. в режиме непрерывного тока, то в режиме -5-* 1+T,(iJp Рис. 10.38. Структурная схема самонастраивающегося регулятора тока. При работе в режиме прерывистых токов возрастает по сравнению с режимом непрерывного тока эквивалентное сопротивление преобразователя. Кроме того, в режиме прерывистых токов индуктивность якорной цепи не прерывистых токов быстродействие контура регулирования тока существенно ухудшается. Для того чтобы обеспечить высокое быстродействие регулирования тока, применяют самонастраивающиеся регуляторы тока. Струк- Список литературы турнап схема одного иэ возможных вариантов самонастраивающегося регулятора тока приведена на рис. 10.38. В таком регуляторе осуществляется изменение параметров регулятора тока в зависимости от мгновенного значения тока якорной цепн ( я- Если мгновенное значение тока якоря отлично от нуля, то сигнал управления подается на преобразователь через ЯЯ-регу-лятор. На интервале периода, когда ток якоря равен нулю, сигнал управления подается на преобразователь через интегратор с малой постоянной времени (Гиг < 7и), что компенсирует увеличение эквивалентного сопротивления преобразователя в режиме прерывистых токов. Прн работе преобразователя в режиме прерывистого тока часть периода изменения выпрямленного напряжения, когда регулятор тока работает как ПИ-регулятор, чередуется с частью периода, когда регулятор тока работает как интегральный. Таким образом, среднее за период воздействие регулятора тока определяется углом проводимости Я,. При наличии в контуре регулирования тока самонастраивающегося регулятора удается обеспечить стабильное качество переходных процессов независимо от тока якорной цепи. Список литературы 10.1. См. [1.1 10.2. См. [6.2 10.3. См. 7.3! 10.4. См. [6.41 10.5. См. [7.20]. 10.6. Майоров Ф. В. Электронные цифровые интегрирующие машины. - М.: Машгиз, 1962.- 408 с. 10.7. Типовые узлы н системы управления Злектропрнводамн на основе устройств УБСР-ДИ / И. С. Аршинов, А. в. Бирюков, О. В. Слежанов-ский, В. М. Хуторецкий, Л. А. Горнштейн, в. А. Кнблнцкнй, Л. Ю. Перснн, В. И. Шухер. - Электротехническая промышленность. Электропривод. 1976, вып. 4 (48), с. 17 - 24. 10.8. Цыпкин Я. 3., Попков Ю. С. Теория нелинейных импульсных систем. - М.: Наука, 1973. - 416 с. 10.9. Электропривод снетем управления летательных аппаратов / Под ред. Б. И. Петрова. - М.: Машиностроение, 1973. - 360 с. 10.10. Яворский в. И., Макшаноа В. И., Ермолин в. п. проектирование нелинейных следящих снетем с тнрнсторным управлением исполнительным двигателем. - Л,; Энергня, 1978. - 208 с. 10.11. См. [9.3]. 10.12. Динамические свойства релейных и импульсных снетем электропрнвадов / В. В. Баль-бух, П. Д. Панкратьев. В. А. Полковников, И. А. Прохоров, А. Г. Ужви. - М,: Энергия. 1972. - 232 с. 10.13. Муттер в. М. Аналогово-цнфровые следящие системы. - Л.: Энергия. 1974. - 184 с. 10.14. Спиридонов А. А., Федоров В. В. Металлорежущие станки с программным управлением. - М.: Машниостроеине, 1972. - 352 с. 10.15. Киселев В. М. Фазовые системы числового программного управлеиия станками. - М.: Машниостроеине, 1976. - 349 с. 10.16. Михеев Ю. Е., Сосонкии В. Л. Системы автоматического управления станками. - М.: Машиностроение. 1978. - 264 с. 10.17. Ратмироа В. Л. Основы программного управления станками. - М.: Машиностроение, 1978. - 240 с. 10.18. См. [9.1]. 10.19. Мнхелькеанч В. И. Автоматическое управление шлифованием. - М.: Машиностроение. 1976. - 304 с. 10.20. Устройства и элементы сястем автоматического регулироваиия н управления. Техническая кибернетика. Ки. 1 / Под ред. В. В. Соло-довникова. - М.; Машиностроение. 1973. - 671 с. 10.21. Растригин Л. Л. Системы экстремального управлення. - М.: Главная редакция физико-математической литературы изд-ва Наука, 1974. - 632 с. 10.22. Принципы построения и проектирования самонастраивающихся снетем управлеиия / Б. И. Петров н др. - М.: Машяиостроенне, 1972. - 260 с. 10.23. Санкоаский Е. Д., Кругдиков В. В. Самонастраивающиеся системы управления с зта-лоинымн моделями. - Минск, Наука н техника, 1970. - 176 с. 10.24. Бесекерский В. Д., Попов Е. П. Теория систем автоматического регулирования. -М.: Главная редакция физико-математической литературы нзд-ва Наука, 1976. - 768 с. 10.25. Козлов Ю. М., Юсупов Р. И. Веспон-сковые самонастраивающиеся системы. - М.: Наука. 1969. - 465 с. 10.26. Александровсквй И. И., Егорове. В., Кузин Р. Е. Адаптивные системы автоматического управлення сложнымя технологическими процессами. - М.: Энергия, 1973. - 232 с. 10.27. Костюк в. И. Беспонсковые градиентные самонастранвающиеся системы. - Киев. Тех-н1ка. 1969. - 275 с. 10.28. Борцов Ю. Л., Поляков н. Д. Алгоритмы адаптивных регуляторов и нх реализацяя в унифицированных системах электропривода. - Электротехническая промышленность. Электропривод. 1973, Nt 9 (26). с. 39 - 44. 10.29. Основы автоматического регулирования / Под ред. В. С. Пугачева. - М.: Нвука. Главная редакция физико-математической литературы, 1974. - 720 с. 10.30. Устройства н элементы систем автоматического регулирования и управлеиия. Техническая кибернетика. Ки. 1. Измерительные устройства, преобразующие элемеиты и устройства / Под. ред. В. В. Солодовиикоаа. - М.З Машииостроеняе, 1973. - 672 с Раздел одиннадцатый НАДЕЖНОСТЬ ЭЛЕКТРОПРИВОДОВ П.1. ОСНОВНЫЕ ПОНЯТИЯ Надежность - это свойство устройства выполнять требуемые функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах. Под устройстеом понимается либо совокупность совместно действующих объектов (систем), предназначенная для самостоятельного функционирования, либо часть системы, не имеющая самостоятельного эксплуатационного назначения, называемая элементом. Соединение элементов в систему, когда отказ любого из них приводит к отказу системы, называют логически последовательным, или основным. Если элемеиты соеди-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


