
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода ФТ),АБ 20 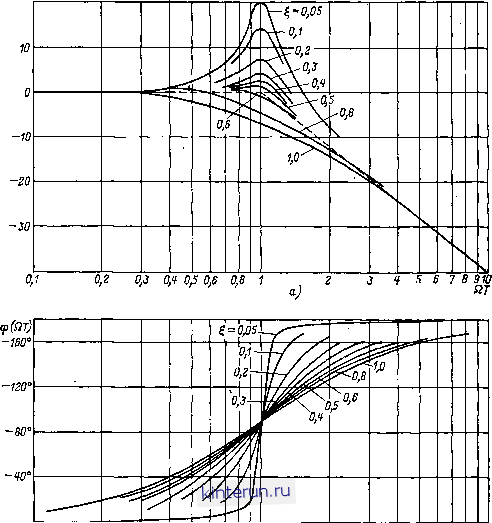 J f 5 6 7 8910 0,1 0,2 0,J 0,4- 0,5 0,В 0,8 1 2 Рнс. 3.11. Амплитудно-частотные (а) н фазочастотные <б) характеристики ДПТ НВ. При Т = 4Ги получаем р=р= -I /27. Решение ураиненнй (3.2) имеет вид: (12Т © = Шуст+ (Шнач-Шуст) е + устТ шнач - уст , нач -Шуст\ нач (3.13) М = Мс -f (Мнач-М,) е~ + Уравнения (3.12), (3.13) целесообразно использовать при отсутствии в якорной цепи добавочных резисторов, т. е. прн расчетах М ач  Рис. 3.12. Графики переходных процессов ДПТ НВ прн учете индуктивности икорной цепи. грузки и естественных характеристиках двигателя. Графики переходных процессов показаны иа рис. 3.12. Включение добавочных резисторов в якорную цепь двигателя приводит к уменьшению Tg, т. е. колебательный процесс вырождается в апериодический второго порядка и графики переходного процесса рассчитываются по (3.11). Обычно при включении в якорную цепь добавочных резисторов 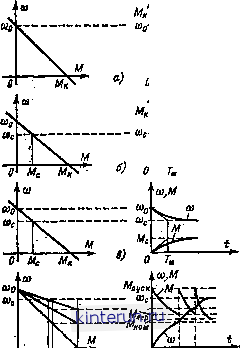
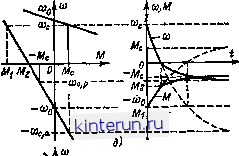 
> Тя- Тогда для практических расчетов значением Г можно пренебречь, т. е. считать Г = 0. Графики переходных процессов будут представлять собой экспоненты первого порядка и рассчитываются по формулам: о = Шу + (Шнач - уст) е~**\ 1 М = Муст + (Мнач-Му )е~ - j Графики различных переходных процессов при предположении = О приведены на рис. 3.13. Здесь представлены: графики переходного процесса пуска двигателя иа холостом ходу в одну ступень (рис. 3.13, а); то же при нагрузке (рис. 3.13, б); наброса нагрузки от нуля до Me (рис. 3.13, в); двухступенчатого пуска при моменте статического сопротивления M. = Mhoii (рис. 3.13, г); реверса при активном (штриховые линии) и реактивном (сплошные линии) моментах статического сопротивления на валу (рис. 3.13, д); динамического торможения при активном (штриховые линии) и реактивном (сплошные линии) моментах статического сопротивления на валу (рис. 3.13, е): Особенностью графиков рис. 3.13, г является различие значений = Jrl<? = = J(xio/Mg на разных ступенях пуска. Переменные о (Q и Л1 (О в режиме реверса, приведенные на рис. 3.13, д, за время t - tt изменяются одинаково при активном и реак-. тивном моментах статического сопротивления. При > 1, m < О при реактивном моменте статического сопротивления графики ш (О и М ({) имеют вид сплошных линий, а при активном - штриховых. На отрезке времени 0< < 1 происходит режим торможения противовключеиием. При активном Мс установившейся скорости двигателя после завершения переходного процесса соответствует режим рекуперативного торможения двигателя. На рис. 3.13, е штриховые линии соответствуют изменению т (i) я М (i) при активном моменте М,. На отрезке О < < ti процесс развивается одинаково при активном и реактивном моментах статического сопротивления. 3.1.3. Двигатели постоянного тока последовательного возбуждения (ДПТ ПВ) Расчетная схема ДПТ ПВ приведена иа рис. 3.14. Обмотка возбуждения LIM двигателя включается последовательно с якорем и обмоткой добавочных полюсов L2M, поэтому ток возбуждения t а следовательно, и поток возбуждения определяются нагруз- Рнс 3.13. Механяческне характернстнкв н графики переходных процессов ДПТ НВ прн неучете вндуктнввости якорной цепи.  Рнс. 3.14. Расчетная схема ДПТ НВ. кой на валу двигателя. Следует учитывать, что сопротявлгаие обмотки вогбуждеиия Гв является частью общего сопротивления якорной цепи г. индуктивность обмотки возбуждения является частью обшей -индук-тивиосш якорной цепи L, а магнитный поток связан с током якоря (i = i) нелинейной = / (У ви, зависимостью Ф 2,4- вида рис. 3.15 (кри- 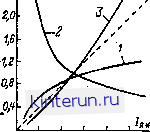 0 О/ 0,8 1,2 1,6 2,0 Рис 3.16. Обобщенные заииенноств ДПТ ПВ V серий Д. ДП. вая i) АФ, = f (/я,). Здесь Ф, = Ф/Фион; /лион- Дяя ДПТ ПВ справедливы три первые уравнения системы (3.1), записываемые в виде uir+L+kO(i(o: (3.15) Из (3.15) дли установившегося режима получаются уравнения механической (3.16) и алекгромехаиической (3.17) характеристик <, ,J!t: (3.16) W(7J *ф(/.) (3.17) Ввиду сложности аналитической аппроксимации зависимости Ф = / (/я) механические и электромеханические характеристики ДПТ ПВ в виде готовых для практических расчетов и построения формул не нашли применения. Для их построения используют универсальные (обобщенные) кривые (4.) - кривая 2 и Л1, (/ ) кривая 3, построенные для конкретных серий элекгро-даигателей [3.3] и- приведенные на рис. 3.15. Здесь М, - М/Мври- Штриховой линией иа рис. 3.15 показана .лшнейная зависимость Л1, = / (/ ) для ДПТ НВ. Как следует из рис. 3.15 и второго выражения в (3.1, при < Л, ион будет Мдат н* < Л1да,х.нв : при /я >и6и-Лдпт.пв >Лдnт.нв Bид электромеханических характерис-тяк ДПТ НВ соответствует кривой 2 иа рис. ЗЛ5. Как следует из (3.16) и (3.17) и зависимости Ф, = /(/, ) на рис. 3.15, при/,-0, М- -О теоретически т- -оо. Однако даже при /, = О в действительности скорость ДПТ ПВ ограничена вследствие наличия магнитного потока остаточного маг-1етизма Фост (0.02 -е- 0,09) Фион. при котором Ьо - { ДгФост- Для выпускаемых промышленностью дат ПВ должно выполняться условие Штах/* иом < * ИЗ Соображений обеспечения механической прочности машины.. Построение электромеханических характеристик дат ПВ рекомендуется вести с использованием кривых вида рис. 3.1S в следующей последовательности. При известных значениях Шиоц и /,нои естественная электромеханическая характеристика строится для заданного даигателя серии с использованием зависимости 2 иа рис 3.15 переводом относительных еданиц-в физические по формулам = шШвон! / = ~ ия.ион- При известной естественной электромеханической характеристике значение скорости на искусственной характеристике сОи при заданном токе якоря определяется по формуле и - иг (3.18) где Ое - скорость при токе на естественной характеристике. Механические характеристики строятся, с использованием зависимости f (/),) по полученным электромеханическим характер ристикам. Для заданной скорости определяется ток / рассчитывается его значение в относительных единицах / . Соответствующий току /я, момент Л1, определяется по кривЬй S на рис. 3.15, рассчитывается момент в физических единицах М - ММщои. Пусковая диаграмма ДПТ ПВ пуска в три ступени последовательным выведеняеы резисторов RJ - R3 контакторами ускорения 1КМ1 - KMS соответственно по схеме рис. 3.16, а приведена на рис. 3.16, б. Значения Ш1 шг КШ 1в а) Я1 лг Я5 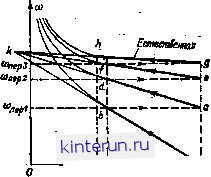 Рис. 3,16. Охема пуска и пусковая дваррами* ДОТ ПВ.
|
||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


