
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода тории и с заданной скоростью для получения необходимого контура обработки (движения по контуру). КонтурныеСЧПУосушествляютуправле-иие перемещением ИО рабочей машины с непрерывно изменяющейся информацией управления, сигналы которой являются функциями времени, скорости, пути или любого другого параметра. Такие СПУ осуществляют крнволннейное движение объекта по заданному контуру как на плоскости, так и в пространстве. Характерной особенностью таких СПУ является непрерывная координация движеннй исполнительного органа в каждый момент времени как по пути, так и по скорости. Контурные системы более сложны, чем позиционные, как по алгоритмам управления, так и по требованиям к электроприводу. Обязательным блоком управляющих устройств контурных СПУ являются линейные и круговые интерполяторы, обеснечнваюшие програм-миронание траекторий движения исполнительного органа по опорным точкам, записанным в управляющей программе, и преобразующие информацнонно-цифровой код программы в информацию в унитарном коде, обеспечивающую сигналы управления электроприводом. Контурные ЧПУ имеют следующие раз-вовндности: прямоугольные (коллинеарные), криволинейные и синхронные 110.17]. Прямоугольные СЧПУ применяются при необходимости движении только по одаой прямоугольной коорданате (поочередно), причем обрабатываемая поверхность параллельна (ход-линеарна) направляющим этой координаты. Криволннейные СПЧУ обеспечивают даиже-нне по криволинейному контуру (нли объему) путем согласованного данжения по нескольким управляемым коорданатам. Синхронные СЧПУ обеспечивают требуемое соотношение скоростей даиження по двум илн большему числу координатных осей. Появленне самоприспосабливающихся адаптивных систем расширило классификацию ЧПУ по числу потоков информации. Поивилось адаптивное ЧПУ (АЧПУ), определяемое как ЧПУ, прн котором обеспечивается автоматическое приспособление процесса обработки к изменяющимся услониям обработки по Определенным критериям. Поэтому а ЧПУ появились дополнительные потоки информации, кроме основных, определяемых управлнющей программой и главной обратной связью. По принципу действия СПУ подразделяются на непрерывные (аналоговые), импульсные (даскретные) и комбинированные (даскрегно-непрерывные). Сигнал программы непрерывных СПУ задаетсн в виде определенной аиалогоной физической величины нли в вида числового кода, который сразу после считывания преоб-разуегси в непрерывный сигнал. Такие СПУ явлиютсн замкнутыми системами с обратной связью по перемещению (по положению) объекта управленин, определяемому датчиками ОС. вырабатывающими сигнал того же вида, что и программное устройство. Эти сигналы непрерывно сравниваются с управляющим устройством, вырабатывающим сигнал, равный разности сигналов программы и обратной связи. Непрерывные СПУ в завнсимостн от вида переменной, определяющей программируемое и действительное перемещення, подразделяются иа системы, работающие по методу сравнения напряжений, и системы, работающие по методу фазовой модуляции (сравнения фаз), получившие название фазовых ШУ[10. 15]. Функциональная схема СПУ, работающая по методу сравнения напряжений, приведена на рнс. 10.29. Управляющая программа записана числовым кодам, а далее включенный на выходе программного устройства ПУ кодоанологовый преобразователь КАП преобразует числовую информацию в напряжение, определяющее заданное перемещение объекта управления. Напряженне программы с КАП подается в управляющее устройство, представляющее собой устройство сравнения УС, где сравнивается с иапряжением ОС, обеспечиваемым аналоговым датчя. - -[ус ДОСА Рве. 10.29. Структурная схема авалоговых СПУ ео сраввеввем вааряхеввв ком ОС в соответствии с перемещением объекта управления ОУ. Напряжение управления, равное разности напряжений программы и ОС, подается в электропривод Эи с ДПТ М, приводншнм в движение ОУ. Остаиюка даигателя и ОУ провсходит при достиженин заданного перемещения, когда сигнал ОС равняется сигналу программы. Точность работы таких СПУ определяется нижним уровнем фиксации напряжения управлення и достигает 0,01мм, что соответствует напряжению 0,0001 В. Недостатком этих СПУ является малая помехоустойчивость, из-за которой они получили малое развитие. К непрерывному СПУ относятся также копировальные системы управления, которые могут выполиятьси как разомкнутыми, так и замкнутыми. Однако наибольшее распространение получилн копировальные системы с замкнутым циклом передачи информации прн использовании в иих следящих электроприводов, замкнутых по полоисению [10.16]. Р1мпульсные СПУ состоят из даскретных элементов. Сигнал управляющей программы записывается унитарным кодом в виде суммы импульсов, определяющей общее перемещение объекта управления, а каждый импульс определяет небольшое перемещение ОУ Такие СПУ подразделяются на счетно-импульсные и шагово-импульсные в зависимости от вида используемого исполнительного даигателя. Функциональная схема счетяо-имвуль-сной СПУ приведена на рис. 10.30, а. Импульсы программы нз программного устройства ПУ поступают в сравнивающий счетчнх импульсов СИ, в который также поступают импульсы от импульсиого датчика ОС, число которых определяет перемещение обьектв уп-равлевия. Управляющий сигнал на СЯ поступает иа электропривод ЭП с исполиительиым двигателем М. Электропривод представляет собой переключатель напряжения, работающий в релейном режиме и включающий двигатель при наличии сигнала управления и отключающий его при отсутствии этого сигнала. Когда число импульсов ОС соответствует числу импульсов программы, СИ через электропривод отключает двигатель и останавливает ОУ. В таких СЛУ применяются реверсивные и нереверсивные СЯ. Функциональная схема шагово-импуль-сйой ШУ приведена иа рис. 10.30, б. Такие СПУ выполняются с шаговыми двигателями в виде разомкнутой системы передачи информации. Импульсы программы через усилители У вводятся в электропривод ЭП с исполнительным шаговым двигателем М, который обеспечивает перемещение объекта управления. Шаговый двигатель от каждого импульса программы производит одни определенный \Аоси Рве. 10.30. Структурвые схемы счетно-нмпульс ной (а) в шагово-нмпульсной (б) СПУ. шаг, поэтому последовательно введенное число импульсов программы обеспечивает заданное перемещение ОУ. Скорость движения определяется частотой следования импульсов. Комбинированные СПУ включают в свой состав аналоговые и импульсные элементы. По принципу управления это замкнутые системы передачи Информации. В таких СПУ программное устройство и датчик ОС выполняются импульсными, а электропривод и система управления аналоговыми. Импульсы управляющей программы, определяющие заданные перемещения ОУ и его скорость, и импульсы ОС, соответствующие действительным перемещениям и скоростям, подаются в устройство управления, которое после сравнения этих импульсов вырабатывает управляющий аналоговый сигнал, пропорциональный отклонению скорости и перемещению объекта управления. Этот сигнал поступает в электропривод с ДПТ, осуществляющий перемещение ОУ, и позволяет непрерывно корректировать рассогласование между заданным и действительным перемещениями ИО. По назначению такие комбинированные СПУ являются контурными. Комбинированные СЛУ бывают импульс-яочу>едящими и импульсио-фазовыми. В им-пульсно-следящих СПУ, функциональная схема которых приведена на рис. 10.31, о, управляющее устройство представляет собой реверсивный счетчик импульсов РСИ с им-пульсио-аналоговым преобразователем ЯЛЛ. Импульсы программы, определяющие заданное перемещение объекта управления, из программного устройства ЯУ и импульсы ОС, определяющие действительное перемещение ОУ, от импульсного датчика ДИ подаются в РСИ через синхронизирующее устройство, обеспечивающее распределение импульсов на входе счетчика. Счетчик осуществляет счет импульсов программы и ОС, вычисляет их разность, определяющую рассогласование заданного и действительного перемещений объекта управлеиия. Эта разность импульсов в ИАП превращается в соответствующий аналоговый управляющий сигнал для электропривода ЭП с ДПТ М, осуществляющим перемещение ОУ. -U .- 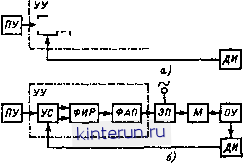 Рнс. 10.31. Структурная схема внпульсво-сле-дящей (а) н нмпульсно-фазовой (б) СПУ. В нмпульсно-фазовой СПУ, функциональная схема которой приведена иа рис. 10.31, б, управляющее устройство представляет собой фазовый измеритель рассогласования ФИР и фазоаналоговь1й преобразователь ФАП. Импульсы программы от программного устройства ЛУ и импульсы ОС от импульсного датчика ДИ через устройство согласования подаются в ФИР, который измеряет сдвиг по фазе последовательности импульсов ОС по отношению к последовательности импульсов программы, что соответствует рассогла-чюввиию заданного и действительного перемещений ОУ. Это сдвиг по фазе в ФАП пре-врйщается в управляющий аналоговый сигнал для электропрввода ЭП с ДПТ М, осуществляющим перемещение ОУ. По назначению такие импульсно-фазовые СЛУ чаше используются в качестае контурных. Шибокое распространение в ЩУ получили ЭВМ начиная с использования их дли расчета и составления управляющих программ и до управлеиия электгроприводами, осупюст-вляющими движения ЯО. В связи с развитием микроэлектроники и появлением микро-ЭВМ и микропроцессоров произошел переход от использования малогабаритных ЭВМ с микросхемами малой и средней степени интеграции к микро-ЭВМ с микропроцессорными наборами и схемами памяти большой степени интеграции. Это обусловило коренные изме- нення структуры СПУ и появление оперативных СЧПУ с преимущественной подготовкой управляющих программ непосредственно у )абочей машины (станка), так называемая ОСУ - оперативная система управления (ГОСТ 23085-80) класса CNC (Computer Numerical Control) {10.17]. Используются также универсальные СЧПУ (УСУ - универсальная система управления) с подготовкой управляющих программ в вычислительном центре и непосредственно у станка. Принципиальным отличием ОСУ (CNQ является нх структура, соответствующаи структуре ЭВМ н включающая в свой состав вычислительное устройство (процессор), блоки памяти и ввода - вывода информации. При этом объем функций, характер проводимых операций н их последовательность определяются не специальными схемами, а специальными программами функционирования, которые вводятся в блок памяти устройства й там храниться постоянно или до замены. Прн этом переработка исходной информации уп-равлякнцнх программ ведется в соответствии с программами функционирования, по которым формируются команда на исполнительные электроприводы и электроавтоматяку уп-равлеииярабочей машины. 01стему ЧПУ типа ОСУ (CNC) позволяют резко расширить функциональные возможности программного управления и ввести новые функции, такие как хранение программы и ее редактирование непосредственно на рабочем месте, широкую систему диагностики, индикацию на дисплее, диалоговое общение с оператором, возможность изменении функций рабочей машины и ее электроавтоматики программным способом в процессе эксплуатации. Поэтому все последние разработки ЧПУ как аа рубежом, так и в СССР основываются на применении микропроцессорной техники и схем памяти с большой степенью иитетрашш, и центральным узлом современных УЧПУ является мнни-ЭВМ, состоящая из микропроцессора и намяти с большой степенью интеграции. Микропроцессор представляетсобойарнф-метнко-логическое устройство, реализованное на одной или нескольких микросхемах большой степени интеграции. Функционально он эквивалентен центральному вычислительному устройству - процессору ЭВМ. Так как микропроцессоры пока уступают по своим возможностям мини-ЭВМ, то они совместно с другими элементам!; управления (памятью, устройствами ввода и вывода информации, синхронизации и др.) компонуются в специализированные микро-ЭВМ, являющиеся центральным узлом современных СЧПУ. В качестве запоминающих устройств (памяти) в СЧПУ стали применять компактные интегральные схемы памяти большой степени интеграции. При этом используютси трн типа намята (ГОСТ 15971-74): оперативная память ОЗУ (типа RAM), постоянная память, постоянное запоминающее устройство ПЗУ (типа RAM), программируемое ПЗУ, содержание памята которого может быть од-но1фатио изменено (типа PROM), или nq>e- программируемое устройство ППЗУ, содержание памяти которого может быть многократно изменено электрическим способом (типа REPROM) [10.17]. Для связи УЧПУ с электроавтоматикой и электроприводами объекта управлення используются логические интерфейсы, которые с появлением систем CNC реализуются в СЧПУ. В ЧПУ металлорежущих станков используются интерфейсы двух типов: программируемые с элементами памяти PROM и REPROM для записи алгоритмов управлении электроавтоматикой стан ка н логическими элементами для организации управляющих сигналов на электроприводы станка и реализовав-ные на жестких схемах с применением транзисторно-транзисторной логики. Программируете интерфейсы наиболее универсальны, так ка с Помоцо>ю перепроп>аммирования памяти интерфейса его можно приспособить к другому станку. При жесткой схеме в этом случае необходамо заменять интерфейсную плату, выполненную для конкретного станка. Структурная схема микропроцессорного устройства ЧПУ приведена на рнс. 10.32 [10.17]. Управление осуществляется четырьмя электроприводами ЭП1-ЭП4, обеспечивающими главное движение и движение подач исполнительного органа / по трем координатам X, у, г. Основную часть микропроцессорного устройства 2 составляет вычислитель, выполненный на одной плате и состоящий из центрального митопроцессора S с генератором импульсов 4 и элементов постоянной памити (типа RAM) 5, оперативной памяти (типа RAM) 6 и памяти с прямым доступом 7. Обмен информации с периферийным устройством ввода-вывода и с блоками интерфейсов управления электроприводами выполняется по общей информационно-числовой шине. Эта шина может воспринимать дополнительную информацию от дополнительного считывающего устройства (например, с перфоленты) 9 через блок параллельного ввода 10. С этих шин информация может поступать на клавнш-но-1шфровое печатающее устройство 11 для .распечатки информации и на блок цифровой индикации 16 (или иа дисплей) через блоки управления аппаратурой 12 и задатчик жаков IS. Управление может осуществляться с пульта управлення 14т клавиатуры 15 или от кнопок включения и отключении 18. Прн недостаточном быстродействии процессора для выполнения линейно-круговой интерполиции по трем координатам в устройстве может быть предусмотрена дополнительная память на мини-дисках 17, подключенная к общей шине в. Информация в виде управляющих команд на электроприводы подается через блоки интерфейса управлении электроприводами 19 в согласии с интерфейсами измерительного преобразователя пути и скорости 20. На базе иодобшлх структурных схем разработаны и выпускаются устройства коыби-ниррвар<ых ЧПУ 1юделей 2У22 и 2У32 для тока[жых и фрезерных станков с жестко про-граммируею1мусц>ойствамнабазе микро-ЭВМ Элекгр(жика-60 и Электромиха НЦ-бЗТ
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


