
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Продолокеше табл. 10.i § Название обратной саязи Электрическая н структурная схемы Дифференциальные уравнения Управление по погрешности н интегралу от нее 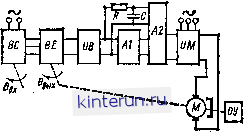 ТыР+1 + F- + pj + fce + -f Je./ при равномерной ааводке с угловой скоростью ш = const и = О , гад , р гад , . d6 , ft . f. Скоростная погрешность б,.=0 Практически коррекция по возмушеиню по нагрузке из-за сложности систем и наличия в ней многих различных звеньев, а также из-за непостоянства R, с, ky, k, зависящих от многих факторов, точно не обеспечивает инвариантности системы, ио существенно уменьшает статическую погрешность. Следящие электроприводы непрерывного действия выполняются как следяшие системы со структурной схемой, приведенной на рис. 10,21. В схеме обозначено: AW1 - измеритель рассогласования, содержащий задатчики ВС и приемники ВЕ грубого {ВС1, ВЕ2) и точного (ВС2, ВЕ2) отсчетов угловых (или линейных) перемещений; S - селектор грубого и точного отсчетов; А W2, AW3 - сумматоры; UB1, 1/Я2 -- фазочувствитель-ные выпрямители ФЧВ; AD1 - AD3, BRJ, меиного тока (отрицательная обратная свизь по скорости). Суммарный сигнал преобразуется в фазочувствительном выпрямителе UBl в сигнал постоянного тока. После UB1 может быть включено последовательное корректирующее устройство AD1 в виде RC-кои-тура или дифференциатора, обеспечивающего дополнительно к сигналу погрешности ее первую производную. Дифференциатор может быть также совмещен с UBl. Далее к сигналу погрешности и ее производной может добавляться сигнал параллельного корректирующего устройства по второй производной от выходного угла \, взятый как произ- водная сигнала по скорости от AD2 я тахогенератора BR2 илн как сигнал по току двигателя и, с датчика UA (отрицательная обратная- ВС1 \*\ВЕ1 т- *В£2 4-1 BR1 L 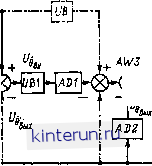 ия*- Рве. 10.21. Функцвональвая схема следящего электропрввода аостояввого тока неарерыввого действия. BR2 - корректирующие устройства (демодуляторы) и тахогенераторы; UR - модулятор; А - усилитель; UM - силовой тиристорный преобразователь напряжения с системой управления тиристорами и устройством токоограничения; М - ДПТ независимого возбуждения. Данные по последовательным и параллельным корректирующим устройствам приведены в [10.18]. ФЧВ применяется, если в AWI используются сельсины или поворотные трансформаторы. В следящем электроприводе с управлением угловым перемещением сигнал задания поступает от задатчика ВС, а сигнал обратиой связи в вых - от датчика (приемника) ВЕ, и измеритель рассогласования AW1 обеспечивает сигнал а, пропорциональный погрешности. На выходе селектора обычно производится сложение сигнала погрешности с корректирующими сигналами по первой производной от управляющего воздействия fu у снимаемого с задающего тахогенератора переменного тока BR.1, и по первой производной от выходного параметра /и у снимаемого с выходного тахогенератора аостоянного или аере- связь по ускорению). Сюда же могутподаваться сигналы связей по [управляющему воздействию и по скорости (штрихпунктирные линии). Суммарный сигнал после корректирования усиливается усилителем постоянного тока. Из-за дрейфа нуля усилителя постоянного тока прямого усиления в следящих электроприводах наибольшее распространение получили усилители, работающие по принципу модулятор - усилитель переменного тока - демодулятор {UR-A-UB2). Обычио демодулятором является второй ФЧВ (UB2), преобразующий сигнал переменного тока в постоянный. Далее сигнал подается на транзисторный или тиристорный электропривод постоянного тока, например типов ЭШИР и ЭТЗС, который имеет в своем составе усилитель, систему управления, систему токоограничения преобразователь UM и двигатель постоянного тока М, отрабатывающий заданное перемещение. При использовании тиристорного усилителя мощности (преобразователя) без токоограничения последнее обеспечивается специальным устройством в виде усилителя с ограничением его выходного сигнала в зависимости от скорости двигателя. Такой усилитель включается иа вход усилителя мощности и при ограничении своего выходного сигнала ограничивает входное и выходное напряжения усилителя мощности и соответственно ток двигателя. Принципиальная элек-трическан схема такого электропривода ири-ведеиа в [10.8]. Точность отработки перемещений в следящих электроприводах непрерывного действия в основном определяется точностью измерительных устройств рассогласования и равна для потеицномегров 0,2-0,6 %, сельсинов 0,26-1 ° и вращаюПщхся трансформаторов - единиц угловых мииут. В следящих электроприводах используются также подчиненное регулирование параметров и система регулирования положения с измерителями рассогласования, обеспечивающими отработцг произвольно изменяющихся сигналов задания. Система является следящей непрерывного действия. При использовании в качестве измерителей рассогласования сельсинов и поворотных трансформаторов в схеме используется фазочувстввтельиый выпрямитель, который включается в состав регулятора положения. 10.3.2. Следящие алектропрнводы релейного действия В релейных следящих электроприводах сигнал погрешности подается иа релейный элемент, который осуществлиет квантование непрерывного сигнала ошибки по уровню, превращая его в дискретный (релейный) сигнал управлеиия двигателем. Рве 10.22. Структурная схема релейного следящего электропривода. Структурная схема релейного следящего электропривода приведена иа рис. 10.22. В качестве измерительных элементов AW в релейных следящих электроприводах, как и в электроприводах непрерывного действия, используются потеиовометрическне элементы и элементы с использованием сельсинов и поворотных трансформаторов. В последнем случае в систему включаются фазочурстви-тельные выпрямители. Сигнал измерительного устройства может подаваться иа релейный элемент £i(C иепосредственио или через преобразователь и усилитель постоянного тока А. Элемент ЕК контролирует крайние заданные значения ошибки в при достижении их включается и подает команду преобразователю им иа включение двигателя М. Двигатель подключается иа полное, обычно ие регулируемое напряжение н отрабатывает сигнал ошибки. При этом отключается ЕК и двигатель отключается от источника питания. Двигатель работает дискретно, включаясь и отключаясь в зависимости от состояния релейного элемента ЕК. При изменении знака погрешности ЕК подает команду на реверсв-рование двигателя. В качестве релейного элемента применяются точные двух- и трехпознциоиные поляризованные, а иногда и элехтромагинтньк контактные реле, а также бесконтактные ключевые элементы, в качестве которых чаще используются триггеры. Статические харах-теристикн таких релейных устройств приведены в табл. 10.2. Релейный элемент обычно исполняет функцию чувствительного элемента, но он может быть усилителем и жлюлнительяым элементом, особенно когда используются каш-тактные реле. При применении бесконтактных элементов релейного действия, например триггеров, основное усиление осуществляет промежуточным усилителем А. В качестве преобразователей и двигателей, так же как и в следящих электроприводах непрерывною действия, используются электроприводы постоянного и переменного тока (см. разд. 3). Основной особенностью работы релейных следящих электроприводов является иаличве автоколебаинй в электромеханической систеаае электропривода при изменении входных снг-иалои, поскольку двигатель в релейных электроприводах работает все время в режимах включения, отключения и реверсирования. Эти колебания принодят к большим потерям мощности в якоре при использовании ДПТ НВ. Шэтому такие двигатели не нашли широкого применения в следящих релейных электроприводах. Предпочтение отдается ДПТ ПВ, в которых ве возникает дополнительных потерь.от автоколебаний и которые имвот больпше пусковые моменты. Эти даигатеяи при наличии двух обмоток возбуждения или вывода средней точки одаой обмотки позволяют использовать простые н вадеаоше дифференциальные схемы выходных каскадов, позволяющие так же просто ревертнровать дангатель. Фуикцноиадьиая схема релейного сдей*-щего электропривода с ДПТ ПВ приведена иа рис. 10.23. В ее состав входят взмеритель-иые элементы: потеициометрические RPC - датчик и RPE - приемник или сельсины и поворотные трансформаторы - ВС - щ(-чнк, В£ -приемник; t/B-фаэочув - тельный выпрямитель (доюдулятор); Л - лаисиый усилитель постояииого тока; El релейный элемент; UM1, UM2 - ( преобразователи (усилители мопаюстн) М -г дангатель постояииого тока с нательными обмотками возбуждения Сигнал вотрешности, усиленный усилителем постоянного тока А, подается на релейный элемент ЕК с характеристикой трехпоэи-циоииого реле, выполиенйого иа даух триггерах Шмидта. В качестве усилителя мопшо-сти, обесвечявакниего питание даигателя, ис> пользуются различные преобразователи far пряжепия. При питаинн электропривода от источника постояииого тока применяют рцв сивные ключевые тоаизисториые преобразователи (см. разд. 3). При питании от источника переменного така целесообразно исвольво-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


