
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода при разных значениях которого на рис. 10.20 приведены графики переходных процессов погрешности, отнесенной к ее установившемуся значению в функции относительного времени. При < 1 корни характеристического уравнения комплексные сопряженные и переходный процесс колебательный. Прн этом при уменьшении повышаются продолжительность колебаний и перерегулирование и уменьшается время отработки заданного угла рассогласования. При i = 1 корни действительные и равные, процесс пре- 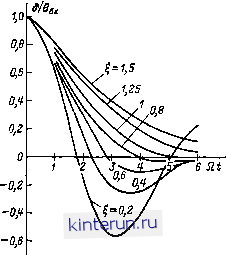 Рис. 10.20. Зависимости ошибки следящего привода от относительного времени и коэффициента затухания. дельно апериодический, затухание критическое. Прн S > 1 корни действительные н разные, переходный процесс прн этом имеет апериодический характер, время окончании процесса резко возрастает н система действует очень вяло, с увеличением увеличивается также установивй1ееся значение погрешности. Коэффициент отиоснтельиого затухания ё зависит от коэффициента передачи системы следящего электропривода к, причем повышение к, необходимое в статике для повышения добротности привода н снижения установившихся погрешностей, в динамике снижает и повышает колебательность процесса и перерегулирование. Это учитывается прн проектировании следящего электропривода. Следя-шнй электропривод в динамике настраивается с колебательным переходным процессом с двумя-тремя колебаниями. Обычно коэффициент передачи принимается высоким при использовании интегральных промежуточных усилителей, а динамические режимы следящего электропривода иастраиваютси путем изменения коэффициента затухании F н момента инерции Изменения F я J специальными устройствами используются редко и только в маломощных приводах. Для этого, например, используются масляные демпферы и электромагниты, создающие вихревые токн, влияющие на коэффициент затухания. Наи- большее распространение получили косвенные способы изменения /и Киим относится использование различных последовательных и параллельных корректирующих устройств, внд и параметры которых получают с помощью синтеза систем следящего электропривода. Наибольшее распространение получил синтез с помощью частотных методов с использованием прямых [10.18] и обратных [9.4] ЛЧХ. Методы синтеза изложены в разд. 9. Вид корректирующих устройств различен, ио все оии строятся иа базе /?С-цепей [10.18]. Широкое распространение в следящих электроприводах получили параллельные корректирующие устройства в виде обратных связей по первой и второй производным выходного угла и последовательные корректирующие устройства, обеспечивающие вместе с сигналом погрешности управление по производной и интегралу от погрешности. Основные обратные связи простейших следящих электроприводов с указанными корректирующими устройствами приведены в табл. 10.1. Там же показано действие этих связей иа изменение параметров следящего электропрнвода по сравнению с простейшим приводом с обратиой свизью по выходному углу (строка 1). Связь по первой производной выходного угла (строка 2) обеспечивается от тахогенератора в виде связи по скорости и позволяет изменять коэффициент затухания, но одновременно оиа изменяет и установившуюся погрешность. Связь по второй производной от выходного угла обеспечивается дифференцированием сигнала по скорости и изменяет частоту колебаний следящего электропривода. Последовательное корректирующее устройство, обеспечивающее управление по погрешности и ее производной (строка 4), осуществляется с помощью дифференцирующего контура. При куТ < I такое устройство позволяет изменить коэффициент затухания привода, не изменяя установившейся погрешности. Устройство, обеспечивающее управление по погрешности н интегралу от нее (строка 5), осуществляемое с помощью апериодического звеиа прн времени переходного процесса значительно меньшем постоянной времени звена, позволяет изменять коэффициент затухания привода при отсутствии установившейся погрешности. Корректирующее устройство по возмущающему воздействию позволяет получить инвариантность системы к изменению момента вагрузки иа валу двигателя. В системе используется положительная обратная связь по моменту нагрузки, измеряемому непосредственно нлн оцениваемому косвенно вычитанием из момента двигателя его динамической составляющей, пропорциональной ускорению привода. Коэффи-хшент обратиой связи по возмущению по нагрузке определяется из условии обеспечения инвариантности системы, прн котором передаточная функция системы равна нулю, и к скука Т а б я в n а 10;1 Освовные оатпые свяав емяящш еветек Назваиве обратной ев язв Главная обратная связь по выходному углу Обратная связь по первой проязвод-вой от зы-ходного угла{<Ц* прн отрн-цательяой обратной связи; - прв положительной) Электрическая и структурная схемы Т р+1 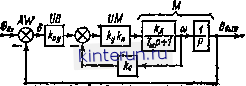 Дифференциальные уравяення + c = -d<r + dt d6 Прн равномерной заводке с угловой скоростью в) = const бкоростная и статическая погрешности вск== с=Л1,/* /-f(F±f.)i2BXH.A.,= Прн равномерной заводке с угловой скоростью ш = const /f- + (±.)- + ** = Скоростнан и статическая погрешности аск=-- с=-с/. ii Название обратной связи Обратная связь по второй производной от выходного угля Управле-ине по погрешности н ее первой производ-иой Электрическая и структуриая схемы
6 -- Продолжениг табл. 10J, Дифференциальные уравнения При равномерной ааводие с угловой скоростью ш = const U±J,)+F- + ku = Fm + M Скоростная и статическая погрешности
dl dt + r + + При равномерной заводке с угловой скоростью ш = сопз - + ( + Ж + *6 = + с Скоростная и статическая погрешности ск=
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


