
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода ров. Среднеквадратичное значение AS, может быть вычислено нз условии А5ц == У ASS + ASiex Из двух полученных предельных значений q выбирается округленное наименьшее. Затем определяются числовые емкости датчика положения арифметического устройства и стыкующихся с ними устройств по формуле NASmax/g- Наконец, наим !ьшне необходимые числа двоичных разрядов этих устройств получаются на основании зависимости n=.ent [lo&(JV-f l)]-f 1. Аналогично наименьшее число двоичных разрядов преобразователя код - напряжение определяете по формуле I q =ent logs + 1- Наибольшая частота работы основных цифровых устройств системы (частота квантования по времени) зависит от наибольшей скорости перемещения регулируемого объекта: Для датчика положения эта частота определяет наибольшую частоту смены информации на его выходе, для преобразователи код - напряжение - наибольшую частоту преобразований кода в [напряжение. Наибольшая частота работы арифметического устройства fg может быть получена умножением fmax на коэффициент мультиплексирования (в рассмотренном случае - 6). Однако с точки зрения повышения надежности системы и уменьшения ошибки квантования по времени целесообразно эту частоту увеличить це в несколько раз, как это указывалось выше. 10.3. СЛЕДЯЩИЕ ЭЛЕКТРОПРИВОДЫ Следящая система - это замкнутая динамическая система, которая получает на вход переменную, произвольно меняющуюся во времени, и обеспечивает ее отработку на выходе таким образом, чтобы ошибка ие превышала допустимых (заданных) значений. Следящие электроприводы производственных механизмов подразделяются: по назначению- иа электроприводы со слежением по углу исполнительной оси или по положению рабочего органа механизма; по исполнению - на электрические с даигателями постоянного н переменного тока, гидравлические, пневматические и механические (в справочнике рассматриваются только электрические следящие приводы); по принципу действия - на системы непрерывного и даскретного (релейного и импульсного) Действия. 10.3.1. Следящие алектроприводн непрерывного действия Структурная схема - системы следящего электропривода приведена на рис. 10.18. Привод включает в себя измерительное устройство AW, преобразующее устройство UB, усилитель ЛЗ.электроприводЭЯ с усилителем А1, преобразователем UM и электрическим двигателем М, воздействующим обычно через редуктор q на производственный механизм - объект управления ОУ. обратные связи внешнюю или главную ОСГ и внутренние ОСВ. На вход следящего электропривода подается управляющее воздействие ВУ, обе-спечивающ;ее требуемый закон управления объектом. Кроме управляющего воздействия, на объект управления и привод всегда действуют различные внешние и внутренние возмущающие воздействия ВВ, вызывающие отклонения регулируемой величины от заданного закона управлеиия. К внешним воздействиям относятся изменения нагрузки на валу электрического даигателя, к внутренним - различные случайные помехи и изменения, действующие в устройствах системы электропривода. 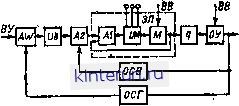 Рис. 10.18. Структурная схеиа следящего электропривода непрерывного действвя. По своему действию система следящего электропривода является астатической, обеспечивающей полную отработку управляющего воздействия с небольшой ошибкой, определяемой возмущающими воздействиями и параметрами системы. Управляющее воздействие подаекя в виде заданного уровня, непрерывной заводки с постоянной скоростью и в виде периодически изменяющегося сигнала. Уравнения следящих влектроприводов. Следящие электрические п1*яводы являются многоконтурными системами, включающими различные устройства, с нелинейными характеристиками. Однако во многих случаях при малых отклонениях управляемых величин, что имеет место в следящих электроприводах, нелинейные характеристики элементов могут быть линеаризованы. Для аиализв данамики следящих электроприводов и их синтеза по условиям точности, запаса устойчивости и характеру переходаых процессов составляются линеаризованные дшренциальные н алгебраические уравнения элементов, образующие систему уравнений* всей системы следящего электропривода. Простейшей нескорректированной системой следящего электропрявода является система с главной обратной связью по выходной-координате, получившая название системы с пропорциональным регулированием [10.3]. За выходную принимается координата, измеряемая приемником измерительного устройства. Если приемник установлен непосредственно на исполнительном устройстве объекта управления, то за выходную координату принимается перемещение нли угол поворота вала этого исполнительного устройства. В больЬннстве же следящих элеиро-приводов приемник измерительного устройства устанавливается иа валу двигателя, а в высокомоментных двигателях он встроен в него. В этом случае за выходную координату можно принимать угол поворота двигателя, соответствующий углу поворота или перемещению рабочего органа объекта управления. 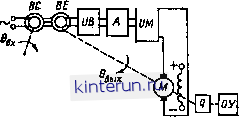 Рве. 10.19. Функваовальвая схема следящего вдектропрввода постоянного тока. Функциональнаи схема такого следя-Шего электропривода с главной обратной чяязью по выходному углу с двигателем постоянного тока приведена на рис. 10.19. Здесь ВС, ВЕ - измернтедьвое устройство, в преобразующем устройстве UB использован фазочувствительный выпрямитель, в качестве усилителя напряжения принят безынерционный усилитель постоянного тока А, усилителем мшцности является безынерционный управляемый тиристорный преобразователь им. Система уравнений электропривода имеет следующий вид: ввх-ввых-в; КуАу = Ку,п; Иу.пйп - вп; en=<o/kf+tR+Ldi/dt; M-M = J dialdt; М (10.4) ввых= >- Здесь Ап.у - коэффициент передачи преобразующего устройства; М - момент нагрузки на валу электродангателя, включающий момент сухого трения М с учетом внешних возмущений, дейстнующих на объект управления, и момент вязкого трения Mb.ti %е.М = Ms+ Л1в,т. При записи уравне- яяй принято, что в редукторе отсутствуют люфты и упругие деформации, потому что в следящих электроприводах применяют редукторы с беззазорными передачами и с высокой жесткостью. При необходамости учет влияния зазоров и упругих деформаций в редукторе и в объекте управления может быть произведен согласно рекомендациям, нриве-денным в [10.1]. Решение системы уравнений (10.4) относительно в вых и б определяет дифференциальное уравнение следящего электропривода, записанное относительно составляющих момента на валу даигателя: Л dt Момент даигателя (М - к6), необходимый для отработки возникающей ошибки, определяется погрешностью б и коэффициентом передачи следящего электропривода к: A=-g- = ка,укукд. Момент имеет данамическую составляющую J составляющую демпфирующего момента F и момент нагрузки Мс. Динамический момент определяет ускорение привода. Демпфирующий момент завтит от скорости. Он определяется даумя составляющими одна из которых возникает вследствие наличия статизма механической характеристики даигателя а другая-вследствие наличия момента вязкого трення Момент, пропорциональный скороств, действует как демпфирующий, способствующий затуханию колебаний следящего электропривода. Поэтому коэффициент F называется коэффициентом затухания. Он равен: F-Fi+F,. Момент нагрузки определиетси сухим трением перемещаемых масс в объекте управления и влиянием внешних возмущающих воздействий на объект управления. При отсутствии возмущений он представляет (юбой мспяевт статической нагрузки М. приведенный к валу даигателя через редуктор. При установке приемники измерительного устройства в объекте управления после редуктора угол выходного вала следящего электропривода определяется скоростью рабочего органа объекта управления ввых=5 о.уй - а при отсутствии в редукторе люфтов и упругих деформаций - скоростью двигателя с учетом передаточного отношения редуктора ввьпс=*р $о>Л. Тогда дифференциальное уравнение следящего электропривода имеет вид; hi * 6. (10.5) Уравнение (10.5) позволяет исследовать работу следящего электропривода в установившихся и переходных режимах. При единичном скачке входного сигнала в установившемся процессе двигатель отрабатывает заданный угол с максимально возможной статической погрешностью, равной бе=Л1<, ?. При равномерной заводке задатчика со скоростью Юуст и непрерывном изменении входного сигнала ввх = Вуст двигатель в установиншемся процессе обеспечивает скорость ш = Юу и отрабатывает заданный угол со скоростной бк (кинетической) и статической погрешностями Скорость отработки задания и соответствующая ей скоростная погрешность определяют добротность следящего электропривода для повышения которой в установившемся процессе следует повышать коэффициент передачи системы к и снижать коэффициент затухании F, т. е. повышать жесткость механических характеристик привода и момент вязкого трения. в переходных процессах следящего электропривода рассматривают зависимость выходного угла от входного, устанавливаемую дифференциальным уравнением илн зависимость погрешности от входного угла по дифференциальному уравнению, которое имеет следующий вид с учетом 8вых = = в -б: Прн ясследованнн переходных процессов от управляющего воздействия (ввх) принимают Мс = 0. Тогда в случае постоянной заводки командной оси со скоростью Юуст и прн ее скачкообразном нарастании, т. е. когда 8вх = О при О и x=<Dy f при О О, -.<й ВуС- и дифференциальное уравнение записывается в виде J+F+MFycr (10.6) Решение (10.6) получается в виде суммы установившейся составляющей погрешности Оу и свободной бсв, называемой динамической погрешностью, которая определяется решением дифференциального уравнения корни характеристического уравиеиии которого Решение дифференциального уравнения позволяет найти динамическую погрешность e =[( ycT-% >)smW- COS Ы Полная погрешность в переходаом процессе при управляющем воздействии б=бк-Ьвд. Характер переходаого процесса изменения погрешности определяется видом корней характеристического уравнения (10.7), зависящим от значения коа)фнцнента затухания. При f = 0; 6=0; bYklJ уравнетие погрешности имеет внд: VkiJ т. е. в системе следящего электропривода возникает колебательный незатухающий про- цесс с амплитудой бя, = а)уст/ часто- той Qo=Aft77. При f=fp 2VA7; а==УШ> 6=0 кр уравнение погрешности в крЩует е-<ч. т. е. погрешность изменяется по апернода-ческому закону. Такое затухание называют критическим. Оно сильно затягивает переходный процесс нарастания ошибки. Для получения требуемого быстродействия привода переходаый процесс измеиения погрешности принимается колебатель ным. Затухание процесса оценивается коэффициентом относительного затухания . F £!/ FKuiVW 2 У kJ
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


