
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода рования скорости, обеспечивает хорошие динамические показатели электропривода, определиемые ее аналоговой частью, и высокую точность регулирования (до 0,001 %), обеспечиваемую цифровой частью. Вычисление действительного положения управляемого механизма и рассогласования по положению в системе можно производить ных реализаций. Рассмотрим несколько хг рактерных примеров. Система автоматического аа.медления стана (САЗ) реализуется на основе использования импульсных датчиков в качестве датчиков скорости 2 ц 5 (рис. 10,13). Однако непосредственное циклическое измерение диаметра рулона по соотношению 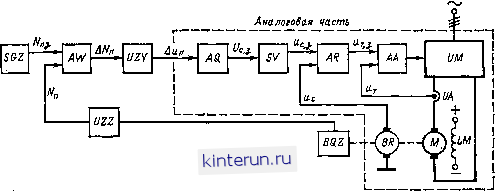 Рис. 10.12. ФункциовЕШЬаая схеиа цифро-аналоговой системы позиционирования. при помощи цифровых устройств импульсиого типа с элементами памяти (частотно-импульсные датчики перемещения, счетчики, накапливающие сумматоры и т. п.) или потенциального типа (кодовые датчики положения, комбинационные сумматоры и т. п.), в последовательном коде (поразрядно) или в параллельном (во всех разрядах одновременно). В условиях значительных промышленных помех при (повышенных требованиях к надежности функционирования системы предпочтение обычно отдается устройствам. 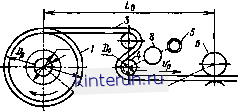 Ряс. 10.13. Кинематическая схеиа сочленения датчиков системы САЗ с механизмами стана. / - рулон на разматывателе; 2 - датчик скорости разиатывателя; 3 - полоса; 4 - следящий ролик; 5 - датчик скорости следящего ролика; 6 - рабочие валки; 7-10 - двигатели соответственно разматывателя, следящего ролика и рабочих валков. работающим в параллельном потенциальном коде, даже если это приводит к некоторому увеличению потребного количества оборудования [10.5]. Указанному выше многообразию функций цифровых регуляторов положении соответствует значительное разнообразие их аппарат- частот датчика скорости рулона fi и датчика следящего ролика /j в виде Op=DoA затруднительно, так как для получения высокой точности измерения соотношения частот требуется подсчитывать в унитарном коде многоразрядные числа за короткий отрезок времени, что противоречит частотным возможностям импульсных датчиков и счетных устройств. Кроме того, в связи с необходимостью получения аналогового сигнала, пропорционального диаметру рулона, для системы автоматического регулирования натяжения полосы требования к диапазону линейного измерения диаметра рулона дополнительно повышаются. Измерение скорости с учетом более низких требований к его точности можао производить подсчетом числа импульсов за эталонный интервал времени с учетом следующего выражения скорости проиатки через частоту импульсов датчика следящего ролика где ЛГоб - число выходных импульсов на один оборот датчика. При этом Функциональнаи схема одного из вариантов цифро-аналогового выполнения такой системы, удовлетворяющая приведенным выше требованиям, показана на рис. 10.14. Система состоит из я нереверсивных счетчиков § 10.2] Позиционный электропризод СТ, подсчитывающих импульсы датчика следящего ролика ИДС2 с частотой /г в течение временных интервалов Т, сдвинутых для каждого последующего счетчика иа врем т. Длительность времени сдвига X (чистого запаздывания измерителя) определяется моментами переполиеиия (или обнуления) управляемого делителя частоты УДЧ, на вход
идсг Рис. 10.14. Фуикциоиальиая схема САЗ с цифро-аналоговым вычислением момента начала замедления. которого подаются импульсы с частотой fi от датчика импульсов разматывателя ИДС1. Масштаб измеряемой величины может из-меиятьси с помощью устройства задания констант, например, при измеиеиии диаметра следящего ролика. Длительность счетного интервала (интервала усреднения) каждого счетчика равна: Г=т (я-1). Она определяется тем, что выходные импульсы УДЧ являются импульсами сдвига для сдвигающего регистра RG (коммутатора), иа выходах которого с 1 по я последовательно появлиется единичный сигнал, закрывающий иа время т передачу импульсов fj иа счетный вход соответствующего счетчика и открывающий иа это же время выходные ключи счетчика для передачи полученного числа Njj в преобразователь код - напряжение ПКН1. Перед началом нового измерения каждый нз [счетчиков устанавливается в 0. Сигнал с выхода ПКН1 в виде напряжения Uj), пропорционального соотношению частот датчиков, т. е. диаметру рулона, поступает в аналоговую часть системы элек-троггоивода АЧ для последующей обработки. Туда же подается второй сигнал в виде напряжения Uy, пропорционального скорости прокатки и полученного в результате цифрового измерения частоты /2 и последующего преобразования ее в напряжение преобразователем ПКН2. Остальные вычисления в системе также производятся в аналоговом виде, что несколько снижает точность определения момента иачала замедления стана, но зато упрощает систему. Из-за относительно большого интервала усреднения систему с рассмотренной структурой после иачала замедления стаиа целесообразно размыкать по положению. Структура другого, более точного, но более сложного варианта САЗ с цифровым выполнением вычислительных операций показана иа рис. 10.15. Измерение частоты fj и соотношеиия частот а также квадратов этих величии производится здесь в цифровом виде с помощью измерителей следящего типа. Эт делается следующим образом. &4f2li * ТгГПКЧ! I tfelJTO SZlT-П L l Г--Ы и5сз Рис. 10.16. Фувкциоиальная схема САЗ с цифровым вычислением момента иачала замедления. Импульсы датчика следящего ролика ИДС2 с частотой /j поступают иа вход сложения реверсивного счетчика СТ1, иа вход вычитания которого подаются импульсы с выхода преобразователя код - частота ПКЧ1 с частотой, пропорциональной произведению эталонной частоты f, = const иа число Ny с выхода СТ1. Счетчик СТ1 вместе с преобразователем ПКЧ1 в цепи обратиой связи образует цифровой следящий интегратор ЦСИ [10.6]. В состоянии динамического равновесия, когда число иа выходе счетчика держится неизменным, частоты иа его входе равны друг Другу: т. е. где N~i - числовая емкость сумматора ПКЧ1. В переходном режиме при скачкообразном намеиении в момент времеии / = О частоты fi иа входе следящего интегратора число иа выходе его счетчика Ny (f) и пропорциональная ему частота fy (О иа вы )де ПКЧ1 в общем случае изменяются в соответствии с уравнением которое при f, экспоненты const имеет решение в виде + ent {[N.,(0)-hNJfa] ехр {-МЫ)} с постоянной времени Т = NJfg. Следовательно, ЦСИ аналогичен ЦАЗ по реакции на входное воздействие. Время переходного процесса определяется в виде ; = 1п iyv(0)-ent (fsiVc ,)]. Следовательно, при малых и относительно медленных изменениях входного воздействия время переходного процесса в ЦСИ также будет достаточно малым, что определяет быстродействие измерителей САЗ. Число Ny, соответствующее скорости прокатки, преобразуетси в напряжение с помощью преобразователя код - иапряжеиие ПКЧ1 и в виде напряжения поступает в аналоговую часть АЧ системы электропривода. Для образования квадрата числа ЛГ, оио подается иа вход преобразователя ПКЧ2, импульсный вход которого связан с выходом ПКЧ1. Импульсы с выхода ПКЧ2 имеют частоту favcici частота измеряется вторым следящим частотомером ЦСИ, состоящим нз ПКЧЗ и СТ2. Она поступает иа один вход счетчика СТ2, связанного по другому входу с выходом ПКЧЗ. Частота на выходе ПКЧЗ пропорциональна частоте ГЭЧ и числу Лст2 на выходе счетчика СТ2. В состоянии динамического равновесия, когда число Лст2 держится неизменным, частоты на входе счетчика равны друг другу: т. е. где Лс2 и Лся - числовые емкости сумматоров преобразователей ПКЧ2 и ПКЧЗ. При JVjg = JVciA?c2- число на выходе СТ2 равно квадрату числа скорости прокатки Щ. Это число при помощи множительного устройства умножается на постоянное число Cg, вводимое а систему до начала прокатки нз устройства задания констант УЗК. Произведение подается на вход дискриминатора чисел ДЧ. На второй вход ДЧ поступает сумма второй константы С с числом N, про пор-циональиым квадрату диаметра рулона. В момент равенства чисел на обоих входах с выхода ДЧ выдается сигнал иа начало замедления схаиа, и система размыкается. В том случае, когда система должна быть замкнутой до окончания замедления, в качестве дискриминатора чисел используется арифметическое устройство АУ .с преобразователем код - напряжение иа выходе. Процесс образования числа iVp и его квадрата Np аналогичен процессу образования чисел Ny и Л, за исключением того, что в качестве эталонной частоты при этом используется частота fi датчика импульсов разматыввтели ИДС1. Поэтому приведем здесь лишь уравнении для определения величин Лд и N: где N a - число на выходе счетчика СТЗ; Лс4. Л?св, Лс - числовые емкости сумматоров соответствующих преобразователей ПКЧ4, ПКЧ5 и ПКЧ6. При Лс4 = NcsNci число иа выходе счетчика СТЗ равно квадрату диаметра рулона Число преобразуется в пропорциональное ему напряжение преобразователем ПКН2 и в таком виде подается в аналоговую часть системы электропривода для регулирования натяжеиия полосы. Для обеспечения стабильной работы счетчиков на их входах устанавливаются устройства синхронизации, аналогичные цифровому интегратору (§3.6.2), которые на рнс. 10.15 ие показаны. Выбор структуры системы автоматического замедления стана {САЗ) из двух рассмотренных выше зависит от конкретных требований по точности и диапазону измерения скорости прокатки и диаметра рулона, допустимого объема и надеисностн аппаратуры, а также от точностных и частотных возможностей используемых аналоговых и цифровых устройств. Поэтому для окончательного выбора структуры необходимо сделать сравнительный расчет обоих вариантов си-, стемы с конкретными требуемыми характеристиками. Система познциоиного. управлеиия двумя электроприводами с синхронизацией перемещения механизмов предназначена для управления парными механизмами с совместным нх перемещением в автоматическом режи № н раздельным перемещением при ручном управлении, причем взаимное положение vfe- , ханизмов может регулироваться в режиме совместного перемещения. К таким механнз мам относятся, например, нажимные устрой ства прокатных станов холодной и горячей ярокатки. На рис. 10.16 показана функпиональная схема одного из вариантов реализации подобной системы на основе устройства УБСР-ДИ, выполненного по мультиплексному способу. Система содержит: двоично-десятичные устройства задания раствора валков УЗР и их взаимного перекоса УЗП, вместо которых может использоваться также управлякщая вычислительная машина УВМ, устройства едииично-импульсной коррекции раствора и перекоса УКР и УКП, двоично-десятичные устройства установки начального раствора и
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


