
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода где w , w, -числа витков вторичной и первичной обмоток трансформатора; У?ц, - сопротивления нагрузки модулятора и выходное сопротивление источника сигнала до модулятора. Коэффициент преобразования модулятора определяется по отношению к амплитуде первой гармоники выходного напряжения, полученного разложением последовательности выходных импульсов (рис. 10.7, д) в ряд Фурье: вых() = /г \ X lsin ©-f-g-sta 3©-Ь ...j. При пренебрежении шунтирующим действием сопротивления нагрузки и падением напряжения в транзисторах коэффициент преобразования модулятора для схемы с рези-сторно-конденсаторным выходом (рис. 10.7, б) Ь вых1 2 . п--т.- тг! ВЫХОДОМ для схемы с трансформаторным (рис. 10.8, б) и выхст1 2 , 2 -.f Ra *°--Ио-п у Rl где выхя ! - амплитуда первой гармоники выходного напряжения. Конденсатор С в обеих схемах позволяет выделить первую гармонику и пропустить ее без амплитудных и фазовых искажений [10.7]. Усилительные устройства (промежуточные усилители) в следящих электроприводах предназначены для усиления сигнала управления в основном по напряжению. Усилитель, кроме усиления, выполняет также сложение сигналов управления и сигналов параллельных корректирующих цепей и преобразование сигнала ошибки при последовательных корректирующих цепях (дифференцирование и интегрирование). При даухотсчетных измерительных устройствах усилитель осуществляет также селекцию сигналов грубого и точного отсчетов. Усилитель должен иметь достаточную выходную мощность, допустимую зону нечувствительности и низкий уровень внутренних и внешних помех. В следящих электроприводах наибольшее распространение получили усилители постоянного тока с характеристиками, имеющими линейный рабочий участок с ограничением выходного напряжении (рис. 10.8, а) при вх > вх,л Для исключения искажений сигналов на выходе усилителя при сложении сигналов на его входе усилитель выбирается или рассчитывается с характеристикой, имеющей Ubx,j, выше всех возможных рабочих сигналов управления следящего электропривода. Иногда применяют специальные схемы в виде эмиттерных повторителей, включаемых на вход усилителя [10.8] и позволяющих изменять значения г<вх,л и значения максимального выходаого напряжения усилителя ивых, max (рнс 10.8,6). В следящих электроприводах широкое распространение получили усилители постоянного тока, выполненные на транзисторах и интегральных микросхемах. При требуемых больших коэффициентах усиления усилители постоянного тока включают последовательно. 1вх,л1 Чвх,л2 Рис. 10.8. Характеристики усилителей постоянного тока с непереключаемым (а) и с переключаемым (б) выходами. В этом случае повышается дрейф нуля, имею-щийси в каждом усилителе. Это обстоятельство привело к использованию в предварительных каскадах усиления усилителей переменного тока. В этом случае при сигналах управления постоянного тока используются Рнс. 10.9. Структурная схема усилителя (мсщу-л итор-усил итель-демодулятор). модуляторы И демодуляторы (рис. 10.9). Сигнал ошибки постоянного тока поступает на модулятор UR, усиливается усилителем переменного тока А, а затем с помощью демодулятора UR снова преобразуется в сигнал постоянного тока. Усилители переменного тока обычио выполняются на транзисторах с емкостной или трансформаторной связью (рис. 10.10, а, б). 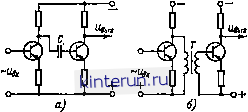 Рис. 10.10. Схемы усилителей переменного тока с емкостной (а) и трансформаторной (б) связями. В качестве усилителей мощности в выходных каскадах следящих 9Ле1Етроприводов широко используются транзисторные и тиристорные управляемые преобразователи постоянного и переменного тока (см. §3.4 и 3.5). При больших мощностях следящих электроприводов в них в качестве преобразователей используются генераторы постоянного тока с транзисторными в тнрвсторными возбудителями. Исполнительными устройствами явллот-ся электрические двигатели постоянвого и переменного тока. Практически усилители мощности с электрическими двигателями объединены в электроприводы стабилизации скорости и момента (см. разд. 7 и 8), часть из которых выпускается комплектно (см. разд. 14). В следящих электроприводах в ббльшей степени используются двигатели постоявиого тока независимого, носледовательного и смешанного возбуждения. Наибольшее распространение получили двигатели серий МИ, ДИ, П2, ПС, ПБС, ПГ с возбуждением от независимой обмотки возбуждения и двигатели серий ДПМ и ПБВ с возбуждением от постоянных магнитов. Эти двигатели обычно используются со встроенными тахогенера-торами (тогда на конце обозначения серии добавляется буква Т). В последнее время шире других используются высокомоментные двигатели серии ПБВ, обеспечивающие высокое быстродействие вследствие малых значений индуктивностей обмоток и моментов инерции якорей, а также вследствие возможности обеспечения высоких пусковых моментов, превышающих номинальные моменты до восьмикратных значений. Двигатели переменного тока используются в основном в маломощных электроприводах или в тех случаях, когда невозможно применение ДПТ. Наибольшее применение получили АД с короткозамкиутым и полым роторами, серий ДИД и AMI. Двигатели с короткозамкиутым ротором имеют высокую механическую прочность и малый ток намагничивания из-за небольшого воздушного зазора (0,15- 0,25 мм), ио обладают большой инерционностью, определяемой большим моментом инерции ротора. Однако при больших моментах ииер1ши механизмов этот недостаток сказывается мало. Двигатели с полым ротором обеспечивают большое быстродействие, так как имеют малые моменты инерции ротора, ио они имеют малую механическую прочность ибольшиетоки намагничивания из-за больших воздушных зазоров (0,4-1,2 мм). Поэтому двухфазные двигатели с короткозамкиутым ротором используются в более мощных следящих электроприводах, а двигатели с полым ротором - в маломощных [10.9]. Ведутся разработки ш созданию мощных следящих электронриводов с трехфазными АД, питающимися от тирнсторных преобразователей частоты [10.10]. Питание следящих элекчиитриводов осуществляется от индивидуальных источников постоянного тока и от промышленных сетей переменного тока с частотой 50 Гц с выприми-телями и без иих. Маломощные электроприводы питаются от источников переменного тока с частотой 400 Гц. Измерительные и преобразующие устройства, а также промежуточные усилители питаются преимуш!ествеино от источников переменного тока с частотой 400 Ги. Это уменьшает габариты и снижает инерционности этих устройств. В устройствах питания от источников постояавого тока широко используются магашют полу проводив новые преобразоиатели, тфеоб-разующие постоянный ток в перемганый требуемой частоты [9.4]. 10.2. ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД Позипиовный электропривод обеспечивает регулирование положения исполиитель-иого органа рабочей машины (см. разд. 1). Он выполняет перемещение исполиитеяьиого органа из исходного в требуемое положение и его остановку с необходимой точностью. Этот электропривод должен также обеспечивать регулирование скорости и момеита двигателя с хорошими статическими и динамическими качествами, облегчающими условие регулирования положения (см. § 6.3). В позиционном электроприводе используются специальные устройства и датчики, контролирующие положение и перемещение. Схемы электроприводов, осуществляющие позиционирование с датчиками положения, показаны в разд. 7 и 8. В резисторных электроприводах постоянного тока при питании от сети снижение скорости перед останоикой при позиционировании осуществляется по схеме шунтирования якоря (см. разд. 4). В раэисторных асинхронных электроприводах многоскоростиые двигатели датчиком ДИЗ переключаютси на пониженную скорость, а в одиоскоростных используется схема включения динамического торможения (см. разд. 4). При работе двух двигателей с фазиыми роторами на одни вал пониженная скорость обеспечивается переводом одного из двигателей в режим динамического торможения. В электроприводах постоянного тока при питании ДПТ от управляемого преобразователя снижение скорости при остановке обеспечивается снижением задающего напряжения. 10.2.1. Аналоговые системы регулирования положения Наибольшее распространение получили позиционные электропривода! постоянного тока с автоматическим регулированием поло; жеиия по отклонению. В таких электропри-. водах используются датчики положения и пе-. ремещении. При использовайии датчиков положения позиционирование щ>евусматри-вается только в зоне остановки у требуемой позиции, а в процессе перемещений система по положению разомкнута. В этом случае используются индуктивные датчики положения, вырабатывающие сигнал, пропорциональный ошибке позиционирования, т. е. отклонению исполнительного органа от эа-даииого положения. При использовании датчиков перемещения, осуществляющих непрерывный контроль положения исполнительного органа, электропривод постояеного тока выполняется с системой подчийенжмо регулирования, включающей контур положения. На рис. 10.11, а приведета структурная схема трехкоитуриой системы управле- § 10.2] Позиционный электропривод вва непрерывного действия. Сигнал задания по положению Ua,3 подан на вход регулятора положения AQ, на другой вход которого подается сигнал обратной связи по положению п с датчика положения BQ, в качестве которого используются индуктивные датчики линейного перемещения илн фазовые датчики угла в виде сельсинов н поворотных 1)>аясформаторов. Ги использовании датчиков угла для формирования ошибки в виде иапряження постоянного тока н ее знака используются фазочувсТвнтельные вьшрями-телй. 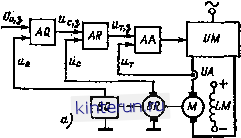 Рис 10.11. Фуикциоиальиая (а) в упрощеивая структуриая (б) схемы трехкоитуриой аналоговой системы позипионвровання Регуляторы тока АА н скорости AR во, внутренних контурах подчиненного регуяв-роваиня могут рассматриваться как один контур, внутренний по отношению к контуру положения. Тогда структурная схема системы регулирования положения имеет внд, показанный на рис. 10.11,6. Внутренний контур аппроксимируется инерционным звеном с постоянной времени Tj][, объект управления представляет собой интегрирующее звено, так как путь является интегралом от скороств. Постоянная интегрирования 1/С зависит от передаточного числа редуктора механизма. Контур положения настраивается на Технический (модульный) оптимум, н регулятор положения принимается пропорциональным с линейной характеристикой. Его коэффициент усиления выбирается исходя из начальной скорости позиционирования н допустимого замедления электропрнвода. Передаточная функция регулятора положения в линейной рабочей зоне может быть найдена из соотношения . V kg С 1 IPP;? ft,(14- рТ р 2рТ1 (1 -f рТ отку ... Т(Р)р.п=4 с-2Г- В зоне, где отработка рассогласования по положению происходит с ограничением тока, система становится нелинейной, н для улучшения динамики в регулятор положения вводится нелинейный преобразователь, обеспечивающий своевременное переключение системы в режим торможения. Коэффициент передачи регулятора положения в этом случае делается переменным, зависящим от квадратного корня нз рассогласования по положению. Система регулирования положении может обеспечивать точное позиционирование при остановке, не работай во время перемещения, а замыкаясь только при подходе к месту остановки. В этом случае настройка регулятора положения производится иначе [10.1]. 10.2.2. Цифро-аналоговые свстемы ре1улнроваиия положения Гн наличия высоких требований к точности регулирования положения ие выдвигается таких же требований к точности регулирования скорости и тока электроприводов, однако требуются хорошее качество протекания переходаых процессов н высокая производительность механизма. Поэтому в миогокоя-турных системах целесообразно контур положении замкнуть в цифровом виде, а контуры скорости и тока - в более простом аналоговом. Для регулироваввя положевия используются цифро-аналоговые системы управления, функциональная схема одной из них приведена ва рве. 10.12. Схема содержит: аналоговую часть системы с элементами, как н прв регулировании скорости (см. рве. 10.11, а), с добавлением задатчика ннтеисиввости нарастания скоростя SV н аналоговой части регулятора положения AQ и цифровую, в которую входят: SGZ - устройство ввода задания положеивя; AW ~ аряфнегатаское устройство; U2V - преобразователь пода в напряжен ие; BQZ - мвого-ратядяый цифровой датчик положения; t/ZZ - преобразователь кода числа положения механизма в параллельный двоичный код. В цифровой части свстемы осуществляются задание требуемого положения, контроль его действительного аначшия в выделение сигнала ошибки по долоясенвю (рассогласование). Все это производится цифровым способом. Задание положения механизна, обеспечиваемое SGZ в виде чнспа N , в параллельном двоичном коде подается На один вз входов сумматора AW, на второй вход которого поступает число Лп также в параллельном двоичном коде, соответствующее действительному положению механизма, полученное от цифрового датчика положения BQZ н преобразованное в двоичный код. Код рассогласования ЫЫ, вычисленный сумматором А W, преобразуется в UTV в напряжение рассогласовании Auq, укфое подается на аналоговую часть датчика положевия AQ, Цифро-аналоговая система регулврова-иия положени51, так же как система регулв-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


