
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода гося номинального режима, из первого уравнения системы (3.1) при Гдоб = О Значения активных сопротивлений обмоток якорной цепи двигателей приводятся в каталогах или могут быть определены по кривым рис. 3.3, откуда г = r J?ho i- Здесь Лион = ИвоиНямл - номинальное сопротивление якорной цепи. Ом. Индуктивность якорной цепи может быть ориентировочно рассчитана по формуле =yUBou/PfBouf я. ион> где Y = 0,25 для компеисироваииых я у для некомпенсированных двигателей. Совместное решение уравнений системы (3.1) относительно скорости о и момента М при с = const. Ми = const приводит к уравнениям РМ 1 Т, dt (3.2) Здесь ulc= щ - угловая скорость идеального холостого хода, рад/с; Mc=ДШс - статический перепад скорости, вызванный падением напряжения от тока статической нагрузки иа активном сопротивлении якорной цепи, рад/с;-- = Мяин -динамическая составляющая момента, развиваемого двигателем, вызванная изменениями питающего якорь напряжения, т. е. возмущениями по управлению, Н-м; Г, = LIr - электро-магиитиая постоянная времени якорной цепи, с; Т = Jr/c - электромеханическая постоянная времени, с. Уравнения (3.2) в операторной форме при нулевых начальных условиях записываются в виде Pffl (Р) + Ре> О ) +-f (Р) = Uip) -,Мс (Р) РМ(р) + -=- рМ {р) + -~М (р): я t я1 н pU{p) + M(p) (3.3) Передаточная функция ДПТ ИВ при возмущении по управлению (Р) = V{p) при возмущении по нагрузке Здесь *д = 1/с. Структурная схема ДПТ НВ приведена иа рис. 3.4. Здесь U = и{р) - изображение напряжения питания; Е= е{р) - изображение ЭДС двигателя. Если в качестве выходной переменной требуется использовать угол поворота вала даигателя q>, в структурную
Рис 3.4. Структурная схеме ДПТ НВ. схему вводится дополнительно интегрирующее звено, показанное иа рис. 3.4 штриховой линией. Расчет характеристии установившегося режима работы ДПТ НВ. Из (3.1) при равенстве нулю всех производных следует уравнение статической электромеханической характеристики при статической электрической нагрузке - токе якоря 1 т т* (3.6) откуда с учетом выражения для момента М - с1 следует уравнение статической механической характеристики лл (3.7) естественные характеристики строятся по двум точкам: ш=(Овоы и / = /ном или M=>Mhom; (0 = 00= и /=М = 0. На рнс. 3.5 приведены расчетные естественные /и реальные 2 характеристики. Отклонения реальных характеристик от расчетных в области больших нагрузок / > / .ном объясняются проявлением действия реакции якоря. 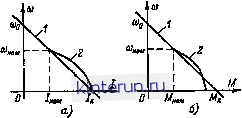 Рис. З.Б. Электромеханическая (а) и механическая (б) характеристики ДПТ НВ. Характерные точки: / 0; М = 0; м == =в в (£/= cfflto) -точки идеального холостого хода; 0=0; / = U; Af = - точки короткого замыкания. Режимы работы машины при наличии источника питания: > сОф (сш >{/) - режим рекуперативного торможения (с отдачей мергии в сеть); ы - щ (U == сщ) - режим идеального холостого хода; Шо > а> > 0; f > с<о > О - двигательный режим работы; ш = 0; сш = О - режим КЗ; ш < О (сш < < 0) - тормозной режим противовключения (последовательно с сетью). Пря замыкании цепи якоря на резисторы без источника питания (U = 0) - режим дина11 ического торможения. Статический перепад скорости = = /сг/с. При /с = const из (3.6) ~ л
const Рис. 3.6. К определению сопротивления якоряов цепи ДПТ следовательно, для любой йскусствениой ха рактеристики при любом / = const справедливо (рис. 3.6) об г ее *° + доб Жесткость механической характерисгавя определяется как . откуда следует, что жесткость механической характеристакн определяется только пвтоком возбуждения и сопротивлением якорной цепК. Естествевиая характеристика имеет яаи&хпь-шее значение модуля жесткости, так как ток возбуждения ие может быть больше номинального, а сопротивление якорной цепи при естественной характеристике двигателя наименьшее. Построение пусковой диаграммы при ступенчатом реостатном пуске двигателя по схеме рис. 3.7, а. Значения . пускового момента (рис. 3.7, б) принимаются в пределах Мдуск = (2 2,5) А!нби дли машии общего назначения и М уск == 4) Моы лая кра-ново-мегаллургическик дангатвлей; момента переключения = (1,15 1,2) Мной- Сопротивления пускового реостата рассчитываются из соотношений: т об од rtXr; Гя=Лг2: г=Хг гдеА = М уек/Л1дао. Статические характеристики режима дя- намического тормохения при схеме рис. 3.8, в рассчитываются по (3.6), (3.7) при и = О {КМ1 разомкнут, а КМ2 замкнут) 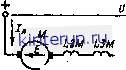 КШ КШ КШ 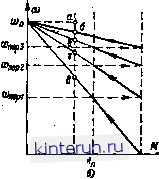 Рис. 3.7. Схема трехступев1атого пуска (о) пусковая яиаграыыа (в) ДПТ НВ. и приведены яа рис. 3.8, б при разных значениях сопротивления Гдл ..Il±l£il или Статические характеристакн ДПТ НВ в системе преобразователь - двигатель (ряс. 3.9, а) строятся по уравнениям где Гц - внутреннее сояротивлф{не<преобр&. зоватеяя. Характеристики пряр жых значениях ЭДС Е преобразователя и прквеяекы иа рис. 3.9, б, штрихпуяктирной линией здесь показана естественная характеристика иря питании двигателя от сети бесшиечной мощ-иостн. 1 oJ 1Ы ш ш  Pqc. 3.8. Схана (а) я механические характеристики (б) ДПТ НВ в режиме даиаК1Меск Г9 торног ж жеина. Статические характеристики при изменении потока возбуждения строятся по уравнениям (3.6) и (3.7) при с = var. Изменение потока может происходить только вниз от 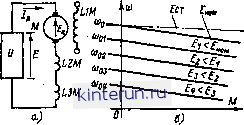 ФЧХ рассчитывается по формуле tp0a)=-arctg-y&5-. (3.10) Вид АЧХ и ФЧХ ДПТ НВ при различных значениях коэффициента демширования приведен на рис. 3.11, а, б. Здесь по оси абсцисс в логарвсическом масштабе отложена относительная частота QT. Решение уравнений зависит от xopHdl характеристического уравнения T,tJ + + 1 = 0 Рнс. 3.9. Схема (а) и механическяе характеристики (б) ДПТ НВ в системе лреобразователь двигатель. номинального, что соответствует изменению скорости вверх от основной. При этом электромеханические характеристики (рис. 3.10, а) при всех зйачеииих с сходятся в точке КЗ, а момент КЗ снижается при уменьшении потока (рис. 3.10, б).
 Мкз Mkz Рве. 3.10. Электромехаввческве (а) в иехави-ческве (б) характеристики ДПТ НВ пря с == var. Расчет динамических характеристик ДПТ НВ. Амплитудно-частотные (АЧХ) н фазо-частотные характеристики (ФЧХ) строятся при предварительном приведении хактери-стического уравнения (знаменателя пшеда-точной функции, приравдеиного нулю) к типовому характерисгическойу уравнению реального колебательного звена. Например, нз (3.4) Ц)(Р) и{р)~ rV+irpH-i (3.8) Здесь T=VTu> 1=VtVJ\- коэффициент демпфирования. Расчет АЧХ и ФЧХ приводнтси подстановкой в (3.8) р = /а. Для (3.8) АЧХ рассштывается по формуле L(/Q)=(/Q)= ]/(l-a-f4iQara - 1 ±1-47,/, 2Г, При вещестеенных различных корнях, т. е. при Ти > 4Ts, процесс апериодический в виде суммы двух экспонент 8 = 0) Р2-Р1 (3.11) х{[Ра( нач- уст)-<а,1>--[Р1( нач- усг)- на,Р}; х{[а<Л иач-Л*с)-А ;ач]в --К (Л*и.ч-Л*с)-Ч.ч] Здесь Л<на,ч.. Ияач - начальные значения момента н скороста двигателя; М -начальные зна- чения производных момента н скорости. При 7 < 47 , будет пара к<й1нлексных сопряженных корней: где = показатель затухания сво- бодшых составляющих переменных (скорости, 1/4ГяГ,-1 Ж. момента); Q: - частота кр- лебаиий свободных составляющих переменных (скфости, момента). Решение уравнений (3.2) в этом случае записывается в виде (iOum-e>ytT)toaQt+ i, ( иач- гст) + мч (М -Л с)ссвШН-. (<а.-с)+Иуд, (3.12)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


