
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Условная энтропия таких сигналов определяется суммарной погрешностью отсчета величины X прн наличии шумовых искажений сигнала и может быть представлена в виде где Н (Х/Хд) - условная энтропия входного (истинного) значения X при задании выходного (наблюдаемого) Xg. Если величина X и помехи статистически независимы, а зиачеиия X равновероятны в интервале {-\-М, -М). то в результате одного отсчета нз (9.64) и (9.65) получается количество информации /(X)-l-blogaAl/a;f, (9.66) где I t < М. Таким образом, прн -♦ О аналоговые сигналы могли бы передавать бесконечно большое количество информации. Реально это количество ограничивается точностью средств измерения величины X. Для сигналов, представленных в цифровой форме, безусловная энтропия имеет вид: JV ЩХд)--s Р (Хд,) log, р (Xgi). (9.67) где p(Xgt) - вероятность i-го нз N возможных значений Хд. Условная энтропия истинных значений цифровых сигналов при задании наблюдаемых (выходных) сигналов Хд определяется формулой Н(Хд/Хд)--Др(Жг,в)Х X 2 Р (Xgf/Xg,a) 10g2 Р (ДС, %в). (9.68) где р (xgf/xgta) - условная вероятность того, что входной сигнал рааеи Xgj, если в результате наблюдения получен выходной сигнал XgtB- Раеность значений энтропии по (9.67) И (9.68) характеризует количество ниформацни, передаваемой цифровыми сигналами. В пределе условная энтропия по (9.68) обращается в нуль и количество информации, передаваемой цифровыми сигналами, определяется по (9.67). В случае равновероятности N значений Х, представляемых п-разрядаым двоичным кодом, количество информации /(Xy) = log2A = log2 2 =n. (9.69) Максимальное количество ниформацни, которое можно передать с помощью одного даончиого элемента, - бит - является единицей количества ниформацни. Сопоставление (9.66) и (9.69) позволяет сделать два важных аывода: 1) аналоговые и цифровые сигналы обладают конечной информативностью и поэтому могут преобразовываться нз одной формы представления а другую; 2) искусственная потеря части потенциально возможного количества информации, имеющая место при прео(азовании в цифровую форму аналоговых сигналов, позволяет избежать значительно больших накапливающихся потерь информации при передаче и обработке сигналов. При комбинированном цифро-аналоговом представлении снгиалоа Хц количество передаваемой ими информации (ц.а)= + 1° 2Л1/ел, (9.70) если аналоговая и цифровая составляющие сигнала статистически независимы, значения Xjj равновероятны, а е < М. Увеличение информативности комбинированного сигнала по сравнению с чисто цифровым используется, в частности, при технической линеаризации квантованных сигналов, заключающейся в том, что если известна про; взводная исходного аналогового сигнала (например, скорость е бистеме регулирования положения), то к полученному в результате аналого-цифрового и последующего цифро-аналогового преобразования кваитован-иому сигналу Хд добавляется аналоговый сигнал, рааный интегралу произаодиой л а интервале изменеиня X от 19 до (i -Ь 1) q, т. е. М q/2. Использование технической линеаризации позволяет в необходимых случаях при заданной ннформатиаиостн снгиалоа сократить число разрядов п цифровых устройств либо при заданном числе разрядов п сигналов повысить статическую и динамическую точность их отработки и упростить расчет системы, оперирующей этими сигналами. Дниамической ииформацноииой характеристикой сигналов является скорость передачи информации (количество информации в единицу времени) Я, называемая временной плотностью илн потоком информации, а также информационной мощностью или пронзаодн-тельностью. Для стационарного процесса с равновероятными .значениями скорости нз-ме1{еиия сигнала л в интервале {+тах> -Хд)при погрешности отсчета 8 скорость передачи П определяется зависимостью l+loga- (9.71) где А - интервал времени наблюдения процесса. Наибольшее значение по (9.71) поток 8v е информации имеет, когда At = -r--; (9.72) Из (9.71) и (9.72) следует, что скорость передачи информации непрерывными сигналами ограничена их полосой частот, а потому они могут быть представлены в днскретнзнро-ваииом виде (см. теорему отсчетов), причем исходная потеря части информации прн двс-кретнзацин окупается тем, что дискретнзнро-ваииые сигналы в цифровой форме можно передавать по каналам достаточно низкого качества при сколь угодно малых последующих искажениях информации, используя также каждый канал в мультиплексном режиме для передачи в промежутках между отсчетами каждой величины нескольких других дискре-тнаированных величин Список литературы 9.1. Теория автоматического управления / Под ред. А. В. Нетушила. - М.: Высшая школа, ч. 1, 1967. - 424 с; ч. 2. 1972. - 432 с. 9.2. Бессекерский В. А. Динамический синтез систем автоматического регулирования. - М.! Наука, Главная редакция физико-математической литературы, 1970. - 576 с. 9.3. Юревнч Е. И. Теория автоматического управлеиия. - Л.: Энергия, 1975. - 416 с. 9.4. Следящие приводы / Е. С. Блейз. Ю. А. Данилов, В. Ф. Казмиренко и др.; Под ред. Б. К. Чемоданова. Ки. 1 и 2. - М.: Энергия, 1976. - 480 н 384с. 9.5. Бессонов Л. А. Теоретические основы электротехники. - М.: Высшая школа, 1973. - 752 с. 9.6. См. [6.2]. 9.7. Соколов М. М., Терехов В. М. Приближенные расчеты переходных процессов в автоматизированном электроприводе. - М.: Энергия, 1967. - 136 с. 9.8. См. [6.3]. 9.9. Моделирование нз аналоговых машинах / Е. А. Архангельский, А. А. Знаменский, Ю. А. Лукомскнй, Э. П. Чернышов. - Л.: Энергии, 1972. - 208 с. 9.10. Вычислительная техника в инженерных и экономических расчетах / А. В. Петров, В. Е. Алексеев, М. М. Титов. В. И. Суровцев, П. М. Шкатов; Под ред. Б. В. Аинсимова. - М.: Высшая школа, 1975. - 302 с. 9.11. Чхартишвили Г. С, Чхартишви-ли Л. П., Клюкни Н. Г. Диалоговая система проектирования одного класса линейных систем автоматического управления. - Труды МЭИ, Автоматизация научных нсследованнй, вып. 241. - М.; МЭИ, 1975, с. 77-83. 9.12. Чхартишвили Г. С, Чхартишйи-ли Л. П., Клюкии Н. Г. Цифровое моделирование динамических задач в АСУТП. - Труды МЭИ, вып. 243. Автоматиаироваиные системы управления технологическими процессами. - М.: МЭИ. 1975, с. 142-160. 9.13. Майоров С. А., Новиков Г. И. Принципы организации цифровых машнн. - Л.: Ма-шниостроение. 1974. - 432 с. 9.14. Поспелов Д. А. Логические методы анализа и синтеза схем. - М.: Энергия, 1974. - 368 с. 9.15. Кузин Л. т. Расчет н проектирование дискретных систем управления. - М.: Машгна, 1962. - 634 с. 9.16. Цыпкии Я. 3. Теория импульсных систем. - М.: Фнзматгиз, 1958. - 724 с. 9.17. Федоров С. М., Литвинов Л. П. Автоматические системы с цифровыми управляющими машинами. - М. - Л.: Энергия, 1965. - 224 с. 9.18. Цифровые следящие системы судовой автоматики / А. А. Батоврин, П. Г. Дашевский. В. Д. Лебедев, Б. А. Марков, Н. И. Чичерин. - Л.: Судостроение. 1972. - 448 с. 9.19. Ту Ю. т. Современная теория управления. - М.: Машиностроение, 1971. - 472 с. 9.20. Кулесский Р. А., Шубеико В. Л. Электроприводы постоянного тока с цифровым управлением. - М.: Энергия, 1973. - 208 с. 9.21. Пугачев В. С. Теория случайных функций и ее применение к задачам автоматического управлеиия. - М.: Фнзматгиз, 1962.-884 с. 9.22. Аиго А. Математика для электро- и радиоинженеров. - М.: Наука, 1965. - 780 с. 9.23. Кэтермоул К. В. Принципы импульсно-кодовой модуляции: Пер. с англ. / Под ред. В. В. Маркова. - М.: Связь, 1974.- 408 с. 9.24. Гусев В. Г. Методы исследования точности цифровых автоматических систем. - М.; Наука, 1973. - 400 с. Раздел десятый ФУНКЦИОНАЛЬНЫЕ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА 10.1. ЭЛЕМЕНТЫ ПОЗИЦИОННЫХ и СЛЕДЯЩИХ ЭЛЕКТРОПРИВОДОВ В позиционных и следящих электроприводах непрерывного действия используют следующие измерительные, преобразующие, усилительные и исполнительные устройства. Дискретные (цифровые) устройства приведены в I 3.6. Измерительные устройства обеспечивают измерение ошнбкн угловых нлн линейных перемещений исполнительного органа рабочей машины по сравнению с задающим сигналом управляющего воздействия н обеспечивают на выходе электрический сигнал в виде напряження, пропорциональный ошибке. По принципу действия измерительные устройства разделнются на потенциометрнческне, индуктивные, емкостные и устройства с принципом действия, основанным на взаимной индуктивности, к которым относится сельсины и вращающиеся трансформаторы. Наибольшее распространение получнлн потенциометры и сннусно-косннусные вращающиеся трансформаторы (СКВТ). алектрнческне схемы измерительных устройств показаны на рис. 10.1. Онн состоят нз двух одинаковых устройств, одно из которых являетсн задатчиком RPC, а другое - приемником RPE, кн-иематнческв связанных соответственно с ва- лами задающего устройства и объекта управления. Потенцнометрнческое измерительное устройство применяется для HssJepehnH ошибки при линейных (рис. 10.1, а) и угловых (рнс. 10.1,6) перемещениях в завнсимостн от конструкции потенциометров. Входными н выходными величинами являются при линейных потенциометрах перемещения 4х и /вых> а прн круговых - углы поворота ввх и Ьах-Потенциометры (датчик RPC и приемник RPE) включаютсн в мост постоянного тока, напряжение на выходе которого зависит от положения двнжков, определяющих ошибку Ивь = Ив = *и,пв. (10.1) где б - ошибка, равная при линейных перемещениях б = - /вых н прн угловых - S= бв1 -бвых;*и,п Иных - коэффициент передачи измерительного устройства, называемый чувствительностью. Коэффициент передачи потенцнометрнче-ского измерительного устройства зависит от величины сопротивлении нагрузки [10.29] max т-5~я-л где Un - напряжение питания; R, R - сопротивления потенциометра и нагрузки. Поэтому характеристика потенциометри-теского измерительного устройства t/вых Ф) явлиется нелинейной (рис. 10.2, б, кривая J), и чем меньше R по сравнению с R, тем ниже *и,п. При повышении Ra k , повышается и при Rb R становитси примерно постоянным и равным К.п = и /2В ах. (10.2) Тогда характеристика Usx Ф) рассматривается как линейнаи (рис. 10.2, в, кривая 2). ляется синусоидой (рис. 10.2, б, кривая /) При малых углах рассогласовании характеристику Ивых Ф) считают линейной (рис. 10.2, б, примаи 2). Тогда где йи,с = 57,3 коэффипиент передачи или чувствительность сельсинного измерительного элемента. Обычно Аи,с = 1 В/(град-с). Сельсинные измерительные устройства не позволяют обе- + 0. 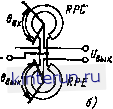  Рио. 10.1. Электрические схемы измерительных устройств потенциометрического типа при линей ных (а) и угловых (б) перемешен иях и их характеристики (6). Сельсинное измерительное устройство ис-пользуетси при измерении угловых перемещений. Оно состоит из двух сельсинов: датчика ВС и приемника ВЕ, работающих в трансформаторном режиме (рис. 10.2). При этом ВС кинематически связан с задающим устройством, в ВЕ - с объектом управлеиия. Напряжение иа выходе ВЕ зависит oi углов  Рис. 10.2. Электрическая схема измерительного устройства на сельсинах (а) и его характеристики (б), рассогласовании осей роторов ВС и ВЕ, определиющих ошибку о, и от нагрузки ВЕ: Ивых==ив=- I ых (10.3) где Ummax - максимальная амплитуда выходного иаприжения; Звых. z - полные сопротивлении выходной обмотки ВЕ и нагрузки. При повышении сопротивлении нагрузки амплитуда выходного напряжении повыша-егси. При z > Звых а = Um sin б. Следовательно, характеристика сельсинного измерительного устройства их Ф) яв- спечить высокие точности, так как погреи; ность сельсинов достигает 1° и выходное нг пряжение его не равно нулю даже при б = i из-за ЭДС, наводимой в однофазной обмоты ВЕ, достигающей 0,3 В. Для повышения точности работы системы с сельсинным измерительным устройством применяют двухотсечные системы с грубым (ГО) и точным (ТО) отсчетами (рис. 10.3) Сельсины датчик и приемник грубого от счета (ВС1 и ВЕ1) соединиютси с задающим и выходным валами системы непосредственно, а сельсины точного отсчета (ВС2 и ВЕ2) - через редукторы ql и q2. Тогда погрешности сельсинов ТО снижаются в число раз, равное передаточному отношению редуктора. В такой схеме сельсины ГО работают при обработке начальных больших углов рассогласовании, а сельсины ТО - при малых углах в режиме слежения. Выбор действия сельсинов ГО и ТО производит специальный селектор, обеспечивающий использование сигнала сельсинов ГО при больших значениях погрешности б, а сигнала сельсинов ТО - при ее малых значениях. Используются различные схемы селекторов. Наибольшее распространение получила схема, приведенная на рис. 10.3, б [10.8]. В этой схеме при больших погрешностях сигнал сельсина-приемника ГО оказывается больше половины опорного напряжения и о, открывает диоды V/ и V2vi проходит на выход схемы (грубый отсчет). При этом сигнал ВЕ2 ие оказывает действие, так как R2 > RL При малых погрешиостих диоды закрыты и на выход схемы приходит только сигнал сельсина-прнеминка ТО (точный отсчет). Измерительное устройство с вращающимися трансформаторами используется также
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


