
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода 2. Строится кривая переходного процесса {Го (О прв подаче входаого сигнала jcj и включении релейного элемента, обеспечивающего в этот момент напряжение -М/о. Расчет кривой Уд (О может производиться любым методом, а построение ее целесообразно делать по шаблону, так как эта кривая будет наноситься иа чертеж неоднократно при каждом включеинн и отхлючеиии релейного элемента. 3. Определяется момеит отключения релейного элемента по границе отключения Уаткл (точка /). В этот момеит времени отключается релейный элемент, что можно рассматривать как подачу на вход линейной части сигнала, рваного - Ug. Поэтому иа чертеже 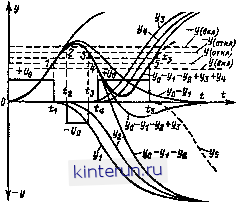 Рис. 9.24. Расчет переходаого процесса в электро-привопе релейного действии методом припасовы-ванни. (по шаблону) наносится та же кривая переходного процесса уд (<), но в области отрицательных значений - jri (О и сдвинутая иа время ti, т. е. уо (i - i). Если при включении и отхлючеинн реле изменяются параметры линейной части, то следует рассчитать другую кривую (О да[Я измененных параметров и наносить ее иа чертрж при отключении реле. 4. Строится суммарная кривая переходного процесса у (О, равная yo(0-yi(0=yoW-Sfo(<-<i). Б. Определяется момеит включения реле <j (точка 2), что соответствует подаче на вход линейной части напряжения, равного - Ug и иа чертеж наносится по шаблону кривая -Уо (0. сдвинутая иа время /j, т. е. -у, (О = = -yoU-Q. Далее расчет повторяется, т. е. в моменты включения и отключения релейного элемента производится графическое суммирование кривых (О, сдвинутых во времени. Метод припасовывания позволяет строить переходные процессы в релейных электроприводах с любыми корректирующими устройствами, при нулевых и иеиулшых начальных условиях, при любой характеристике релейного элемента и при переменных параметрах линейной части, связанной с включением и отключением релейного элемента. .4. МЕТОДЫ АНАЛИЗА И СИНТЕЗА ЦИФРО-АНАЛОГОВЫХ СИСТЕМ ЭЛЕКТРОПРИВОДА При описаинн структуры и функций сложных систем, к шторым относятся системы электропривода с применением цифровой и аналоговой вычислительной техники, используется ряд уровней описания с различной степенью детализации, располагаемых по иерархическому принципу [9.13]. Процесс исследования свойств системы упрощается с уменьшением степени детализации ее описания, когда сложное устройство рассматривается как функционально законченный элемент еще более сложного устройства. Каждому из уровней описания цифровых систем соответствует свой математический аппарат исследования. Расчет электрических параметров цифровых элементов основывается иа теории электрических цепей; расчет вычислительных и логических устройств, выполиеииых з этих элементов, - иа аппарате булевой алгебры И теории конечных автоматов [9.Ш]; расчет динамики систем, выполиеииых из этих устройств, - иа общих законах теории автоматического регулирования, специали !-роваиных да[я анализа цифровых и импульсных систем в виде ряда операторных метоцов иа базе z-преобразоваиия или в виде метода переменных состоиния, когда описание динамики системы осуществляется рядом разндрт-иых уравнений первого порядка [9.15, 9.8]. На рис. 9.25, а показана обобщенная структурная схема цифро-аналоговой систшл управлеиия электроприводом. Кроме симвади-ческих элементов, рассмотренных ранее, здцсь обозначено: g - аналоговая задающая веяи-чина (входное воздействие); у - аналогсшя регулируемая величина (выходное воздещрт-вие); х= g - у - аналоговая ошибка p gry-лирования; g* - числовая задающая ветчина; у* - числовая контролируемая чина; - рассогласование в числовом i и - аналоговое управляющее (регулирую0(ве) воздействие; f - аналоговое возмущаш воздействие; (р) - передаточная фун аналоговой части системы; f -передадря-иые функции элементов запаздывали; ЦКУ - цифровые корректирующие ycSfi-ства; ЦЗУ - цифровое задающее устройрйо; ЦД - цифровой датчик обратной сщ; ЦР - цифровой регулятор. Аналоговая часть системы содержит чиненные внешнему цифровому контуру в-треиние аналоговые шитуры регулирования отдельных параметров электропривода, силовую часть электропривода и управляемый механизм. Характер входного воздействия зависит от назначения системы: в системах стабилизации g (О постоянно; в системах програмшюго управлеиия оно является известной функцией времени; в следяпщх системах - заранее неизвестной функцией времени. В соответствии с этим делением в качестве ЦЗУ могут использоваться устройства ручного оператив- ного воздействия, сястеиы дистанционной перестройки СДП сложных механизмов с предварительным набором задающих величин, про-грамыио-задакяцне устройства ПЗУ или цифровые управляющие вычислительные машвны ЦУМ, а также комбинации из этих уетройстн. Цифро-аналоговая система управлення называется автономной (локальной), если на ЦУМ возложгао только вычисление числового задания, и неавтономной, если ЦУМ выполняет также функции ЦЗУ и ЦЦ. В структурных схемах цифровых устройств системы рис. 9.25, а импульсный и релейный элементы характеризуют наличие дискретязация и квантования сигналов, crtenena в виде, показанном на рве. 9.2S, б. При этом передаточные функции звена запаздывания и экстраполятора также отнесены к передаточной функции приведенной аналоговой части системы W (р). Такая расчетная схема наиболее часто используется для анализа цифро-аналоговых систем. В случае То < эта схема рассчитывается как непрерывная нелинейная, а в случае Го = = const s Га f, но при налнчин технической (или статистической) линеаризации характеристики квантователя - как линейная импульсная (рис. 9.25, в). Алгоритм работы ЦКУ, выполняющего роль дискретного фильтра, обычно опясы- 1 :. I I-----------------1 ьа-снш-а \f L Jl!..Jt 6) 8) Рис. 9.26. Структурные схемы цифро-аналоговых систем управлеиия электроприводом. а чг, обобщевиая схема; 6 - расчетиаи схема: с -< динеариэованиаи расчетная схема. ЦКУ - масштабное и функциональное преобразование сигналов без изменения их дискретной природы, элемент запаздывания г1> - время, затрачиваемое на обработку ниформацни в данном устройстве, фильтр нижних частот - наличие экстраполяции выходных сигналов устройспа. Шредаточная функция экстраполятора нулевого порядка имеет вцд: Г,(р)----. где Ti - период секретности соответствующего импульсного элемента. Времи аапаады-вия Т; обычно бывает меньше периода двс-Чности Т/=ЬГ = const, где О = ?1 < 1. В завнснмостн от соотношеиия периодов дискретноств отдельных цифровых узлов и постоянных времени аналоговой части Г/ расчетная структурная схема системы может быть значительно упрощена. Так, в случае реализации цифровой части системы в виде специализированной ЦУМ с общим периодом дискретности Г и достаточно большим числом уровне квантования задающей и регулируемой величин по сравнению с числом уровней квантования рааюгласованяя расчетная структурная схема цифро-аналоговой системы управлення электроприводом для ступенчатых входных воадайствий может быть пред- вается либо в виде системы разностных уравнений, либо в виде передаточных функций D (г), соответствующих z-преобразоваиням этих уравнений [9.16]. Конечные разности и суммы решетчатых функций являются аналогами производных и интегралов непрерывных функций. Если ограничиться рассмотрением несмещенных во нремеии решетчатых функций вида х* (() - = X (nTt), где я = О, 1, 2..., что обычно допустимо при расчете систем регулироваиия с цифровыми ЭВМ, то прямой разностью первого порядка функции / (я) называется решетчатая функция А/(я)=/(я+1)-/(п). (9.33) а обратной разностью первого порядка - решетчатая функция Vf(л)=/(я)-/(n-l). (9.34) Разности (9.33) я (9.34) характеризуют скорость изменения последовательности / (я). Прямая и обратная разности -го порядка определяются рекуррентными соотношениями: А*/ (п) = А [A*-V (я)] = Aft-V (я + 1) - -A*-V(n); Vft/(n)=V[V*-V(n)] = = У*-1/(я)-У*-1/(п-1). Конечной суммой первых п значений дискретной последовательности называется решетчатая функция Соотношение, связывающее некоторую решетчатую функцию и ее разности различных порядков, называется разностным уравнением. При постоянном периоде То разностное уравнение [является линейным, а в пределе при Тд-*-0 оно преобразуется в дифференциальное, если такой предел дает дифференцируемую функцию непрерывного аргумента. Широкое распространение для решения разностных уравнений благодаря своей простоте и наглядности получили различные операторные методы, основанные на переходе от решетчатых функций к их изображениям: обычное преобразование .Лапласа, дискретное преобразование Лапласа [9.17], z-преобразо-вание, w-преобразоваиие и др. Дискретное преобразованне Лапласа F* (р) - это преобразование Лапласа ряда дискретных значений фуикции / (t), которые могут быть представлены в виде импульсной последовательности F*(P)= fme-P . (9.35) Функция комплексного переменного F (г), называемая z-преобразованием решетчатой функции / (я), определяется равенством Р(г)= 1; /(n)ar Z{/(n)}, (9,36) в=.о где геРо. F (г) представляет собой изображение оригинала f ( ) если ряд (9.35) сходится. Иногда функция F (г) трактуется как изображение непрерывной фуншши времени / (i), рассматриваемой в дискретные моменты времени /= пГо, т. е. f (г) = Z {/ (Q}, что условно обозначается F (г) = Z (р)}, где /? (р) = j f (/) в-Р=Ь (О } - преобразование Лапласа функции / (Q. Изображения некоторых употребительных функций времени .приведены в табл. 9.9. Для более сложных временных функций z-преобразования могут быть найдены с помощью табл. 9.9 и ряда теорем z-преобразоваиия: теорем линейности, смещения, изображения суммы и разности, изображений свертки и др. Теорема линейности Таблица 9.9. Изображения функций вреиени = s CiFi (г). Теорема смещения 2{/(-т)},>,= f jf 1 - т/Т -\ при О < т < Г ; {r f (z при г = /п7оЧЛ -целое). Оригинал fit) I ( б W б - АГо) е- I ( (1-в- 0х X 1 т sin Q t\ ф cos Q Л it) sh Q П U) ch Q /1 Ф atlTo I ) Изображение F (p) Изображеине F (г) F=ri 1 г;г(г+1) 2(г - 1)>
Теорема об умножении оригинала на ехр (оО Z {ехр ( О/ (0} =ехр (аГо) f [г ехр (- аГ,)]. Теорема об умножении оригинала на f где m > О (целое). Теорема об изображении разностей Z{Aft/(n)}=(z-l)*f (Z) прн &yf (0) = О для V = О, 1.....А - 1. Теорема об изображении суммы [< )-- Теорема об изображении свертки двух решетчатых функций fi (п) н /g (п) 2] fi(v)/s(n .v=0 .Fi(z)fs(z). Теорема о начальном значении оригинала /(0)= Ит f (г), если этот предел сущьС1ьует.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


