
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Методы cuHieatu а етмша релейнт снетем Предо. 1 -jjj Вид иелииеВиоств Наинеиоваиве! Карактеряетяка при Л>в при Аа Годографа Аналог - цифра где fc - fi (А + ОД, В-целое число Двухпозиаа> оииое реле с зоиоб ие-чувстввтель-иости Трехпозици-оввое реле с зовов ве-чуаствятель-воств ffftnr А* Люфпг Гвстереэвс 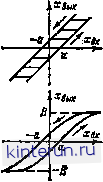 + arcsln( Cjxoe тревве Аналив и еинтвя ввтаяюягиаировшшею влектропривода при фнксировйнных значениях А с амплнтуд-но фазовой характеристикой = Ph, () + /Qh,9M). где (А) = Хр/А; Q (А) = Xq/A -коэффициенты гармонической линеаризации. Значения коэффициентов линеаризации для наиболее употребительных видов нелинейностей приведены в табл. 9.7. Характеристику Wh,b {А) =.*вых/-*вх называют также комплексным коэффициентом усиления нелинейного элемента [9.1]. АФХ нелинейного элемента может быть записана в виде где (Л)=КР. s {A)+Ql э W - амплитудная и 9H,b(i4) = arctg[QH, M)/PH, (A)l - фазовая характеристики нелинейного элемента. При однозначной зависимости характеристики нелинейного элемента Ан (А) = = Рн,а W, так как Qh.s () 0. потому что нет фазового сдвига гармонического сигнала на выходе нелинейного элемента. Фазовый сдвнг появляется только прн неоднозначной зависимости характеристики нелинейности, когда одному и тому же значению Хвх могут соответствовать разные значения хх С табл. 9.7). Метод гармонического баланса осиоваи на том, что в системе, содержащей линейную часть и нелинейный элемент, условием существования колебаний В системе является гармонический баланс колебаний ив входе нелинейного элемента и на выходе элемента сравнения. В этом случае Wh..(A)W, (/Q)-1. л. с. Гольдфарб [9.1] предложил решать это уравнение графически, иа комплексной плоскости, записывая его в виде и строя годографы частотной АФХ линейной части и обратной АФХ нелинейного элемента прн фиксированных значениях частоты Q и амплитуды А (рис. 9.22, б). Пересечения этих годографов и указывает иа наличие автоколебаний с частотой, определиемой по АФХ линейной части, н амплитудой, определенной по обратной АФХ нелинейного элемента в точке пересечения годографов. Прн отсутствии колебаний в системе годографы не пересекаются. Иногда АФХ нелинейного элемента определяется как функция отношения амплитуда колебаний А и параметра иелинейностн а [9.8]. Метод прнпасовываини [9.3, 9.8] основан на построении в нелинейной системе переходного процесса по участкам, иа каждом из которых за начальные значения неременных приинмаютси их конечные значения на предыдущем участке и результаты расчета припасовываются илв сшиваются. В системе реле;й-ного действия, которая разбивается на линейную часть ЛЧ и безынерционный нелинейный релейный элемент РЭ (рнс. 9.23, а), переходный процесс рассматривается как реакция линейной части на включение и отключение релейного элемента, обжпечивающего при этом подачу и снятие сигнала управления Uo на Входе линейной части. Момент включения и отключения релейного элемента определяется значением выходного сигнала
Рис. 9,23. Структурная схема системы алек1¥0-привода релейного действия (о) и импульсы напряження На входе лннейной части системы при включении и отключении релейного элемента (б). системы (линейной части), подаваемого иа вход по цепи обратной свизи. Релейный iuie-мент при этом подает на вход линейной части одинаковые, но сдвинутые по времени прямоугольные разнополярные импульсы, обфдрр в виде напряжения и (О, записанного согласно теореме запаздывания операционного исчисления в изображениях U{p)Ug{p)~Ug(p)e~P- где Uo - амплитуда импульса; ti, t,... -7моменты времени переключения релейного Элемента (см. рнс. 9.23, 6). Знаки + нли - определяют подачу положительного нлн отрицательного сигнала управления на вход лннейной части. При этом линейная часть системы ЛЧ обеспечивает на выходе переходный процесс, описываемый в общем виде дифференциальным уравнением записанным в операторной форме в виде (flnP + On-iP + + OiP + Оо) У (Р) = У- (Р) и определяющим изображение выходной ве- U(p) личины у(р)= апР + ап~1Р ~+---+ЧР+<к u(p) Р где Р - полином знаменателя. f 9m Мп9ёы cKHitaa и вцшлиаа релейных систем Пря этом во времени выходная величина во теореме запаздывания операционного исчисления определяется В виде суммы отдельных переходных процессов, сдвинутых по времени в зависимости от включения и отключения релейного элемента: l/(t)=yo{0~yo{t-ti)~yo(t~t + + </о + + Un (р) где уо (О -т р -переходный процесс, возникающий прн включении и отключении релейного элемента. В общем виде значения (/ (i) могут быть разными прн включении и отключении релейного элемента, если линейная часть прн этом меняет свои параметры. Значения Uo также могут быть разными при разных полярностях импульсов, хотя обычно релейные элементы имеют одинановые значеинн +Uo я --Uo. Моменты времеии включения и отключения релейного элемента (ti, t, t, U -) определяются его характеристикой и выходным сигналом системы. Они находятся в ходе расчета переходного процесса. Расчет н построение переходного процесса производятся графически. Порядок рас* чета следующий. 1. Определяются границы включения Уакя и отключения уощ релейного элемента в зависимости от выходного сигнала системы, переходный процесс которого строится. Они зависят от сигналов задании Xj и сигналов включения и отключения релей* иого элемента (см. табл. 10.2) и определяются нз уравнений Хз - (вкл1 *= *вкл1 *з-У<откл) откл где Лвкл> *вткл - значения входного сигнала релейного алемеита при его включении и отключении. Границы включения (/вк и отключения уогхя ДЛЯ различных релейных элементов приведены в табл. 9.8. Значения увкл н JetKji наносятся йа расчетную плоскость у (О (рнс- 9.24). Для примера принято трехпознциониве реле с зонами нечувствительности. Т а е л а ц а 9.8. Границы переключении реле , Вид релсйворо алемеита Характеристика границы включения, оТклЮченВя реле при положительной полярности при отрицательной полярности jtUyxflBtRnHOHBoe идеальиоа реле *(вкл) = (откл) а - *1вкл> - iloTKa) ухйо ,-ПвзаШ10Виое рейе е зовов иечув-стввтеЛЬноств (вкл) <отвл) - 3 + *1 -~ ты *s *- *1 Трехпозициоииое няеальное реле *(вкл) * (втхл) = *а + 1 ТрехпозицИбнноё еЛв с зонами аечув-етвИтельиостн - *(8КЛ) - *в + г
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


