
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Аналив и синтез автоматизированного электропривода где До, Ai, А - поотоянные интегрирования. б) Часть корней комплексно-сопряженные, например pi, - -а ± /6, а остальные Р . р4 Ря действительные и разные - решение х (О = Д -I-(Дх cos W + Л а sin 60 X xe-+s Дйв *, (9.24) где До. .1. . - постоянные интегрирования. Нахождение постоянных интегрирования при классическом методе расчета производится исходя из известных начальных и граничных условий. Для определения коэффициентов рассматриваются уравнение (9.23) и его производные при начальных условиях (<= 0). Прн этом получается следующая система алгебраических уравнений: х(0)=До--1 + + Л+...+Ля; (0) = Д1Р1 -f Д,р, -Ь ДзР, + . + АпРя, (0) = др-}- А1 + А+...+ Ар%; Найдя значения переменных и их производные при < = О и решая эту систему уравнений, находят постоянные интегрирования Ai, А%, д , .... д . Коэффициент до представляет собой установившееся значение переменной. Следовательно, для его нахождения уравнение (9.23) и дифференциальное уравнеине (9.22) рассматриваются при = оо. Тогда из (9,23) Луст == -о, а из (9.22) д = дует = Xla. Переходный процесс х (f) рассчитывается по уравнению (9.23) при различных значениях времени Например, и системе электропривода с обратной отрицательной связью по скорости (см. рис. 9.1) переходный процесс измеиения скорости описываетсн дифференциальным уравнением (9.1), возможны три действительных кории характеристического уравнения при инерционном преобразователе и изображении двигателя двумя апериодическими звеньями, когда 4Гя < Т (см. разд. 3). Решение дифференадального уравие-иия имеет вид: (о(0 = до+Д1в- ч + дгв-ч-41в-ч (9.25) где Гх, Ti, Та - действительные кории, равные постоянным времени преобразователя и двигателя: Постоянные интегрирования при (о, = О определяются из системы уравнений м(0) = До+Д1 + Дг--Дв-О; -(0) = Tai+nAi + TsAaO; (0)7ЧД1-- ГД,--ГД,=0, где До = Уравнение тока двигателя получается из (9.25) i (О = 60 + Бге- + 52*-* + В,в- . где 5о = /с Ба-ТА,. 5i==f ПДх; Т А>; Операторный метод также требует опре-делеиия корней характеристического ураа-иеиия. Но он позволяет находить постоиниые интегрирования более простым способом, чем в классическом методе. Для этого дифференциальное уравнение (9.22) записываетси в операторной форме, т. е. каждый член уравнения заменяется своим изображением. Наиболее употребительные простейшие операторные соотношения по Карсону - Хевисайду можно получить из изображений по Лапласу, приведенных в табл. 9.9. Дифференциальное уравнение в операторной форме записывается следующим образом: py.---- о рп+ а 1рл-1+oip+ao В(Р) (9.26) - изображения скорости d/d/- оператор диффе- где ш (р). и, ip) и напряжении; р = реианровавия. Решение дифференциального уравнения м в>емеви находятся по теореме разложения 4 = 1 1 - РЛ - КОрН! уравиенря; Г (р) - производная знаменателя (9.26): Г iP) = попр - + ( -!) a .ipn-i+... ...-f-2a,p+ai. Решения, полученные по теореме разложения, аналогичны решениям, полученным классическим методом. Например, при действительных корнях получается уравнение (9.23), где постоянные интегрирования равны: г- 1 (01 В (Pi) В(Рп) ,0, РхГЧрОРпГ{РпГ Приведенная теорема разложения действительна при степени р в числителе меньше степени р в знаменателе, что наиболее характерно для дифференциальных уравнений, описывающих процессы в системах электропрнвода. При степени р числителя больше степени р знаменателя применяется теорема разложения другого вида [9.5]. Достоинством классического и операторного методов является высокая точность расчетов по сравнению с другими методами. Недостатком является необходимость нахождения корней характеристического уравнения, что представляет определенные трудности при уравнениях выше 3-го порядка. Решения уравнений 4-6-го порядков требуют большой затраты времени. Следует учесть также, что постоянные интегрирования могут представлять собой сложные алгебраические выражения. Частотный метод не требует определения корней характеристического уравнения. Он базируется на рассмотрении поведения системы по ее частотным характеристикам. -Построение кривой переходного процесса производится по действительной или мнимой частотным характеристикам системы, полученным из АФХ IF0Q)=P(Q)-f/Q(£2). где Р (Q), Q (й) - действительная и мнимая частотные характеристики. . Наибольшее распространенне получил метод расчета действительной частотной характеристики системы. Он основан на уравнении, связывающем переходный процесс во времени у (f) с действительной частотной хараетеристикой системы, записанной при подаче на вход системы единичного ступенчатого воздействия г/(0= р(й)Нвйп. (9.28) -i ° При этом действительная частотная характеристика, построенная в функции частоты (рис. 9.15, а), заменяется мало отличающимися от кривой горизонтальными и наклонными прямолинейными участками, образующими с осью ординат трапеции, и представляется как алгебраическая сумма трапецеидальных частотных характеристик ...... я(й) = 2 Pk{i), где k - количество трапеций. На рис. 9.15, а для примера показана замена кривой Р (Q) участками прямых а - 6 - в - г - д - е - ж, которые образуют три трапеции /, , /. Трапеции взяты так, чтобы учесть площадь, заключенную между кривой Р (й) и осью абсцисс. Замена кривой Р (Й) трапециями позволяет рассма- тривать переходные процессы отдельно в каждой трапеции, а затем их алгебраически сзгммировать, что значительно упрощает расчеты. Каждая трапеция характеризуется четырьмя параметрами (рис. 9.15, б): высотой Ре, полной полосой пропускании частот йо> полосой равномерного пропускания частот Qrf и коэффициентом каклоиа х = Я/Йо. Для расчета кривой переходного процесса используется единичная трапеция с параметрами Ро = 1 и Йо= 1, дли которой 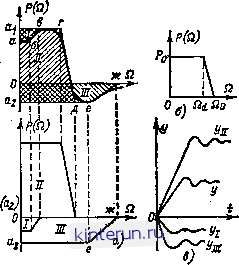 Рнс. 9.15. Действительная частотная характеристика системы с заменой ее трапециями (а), единичная трапеция (б) и графакв перехояного процесса ( ). записывается переходная h-фуикция для условного времени т: h(T) = (l-x)L где T=rtJ; SiT Si(T)-J :Si(A?- C08.T -СОвЛТ (9.2§) С sinT da - интегральный синус. Переходная Ь-функция табулирована для )азличных наклонов х, изменяющихся от ) до 1, и условного времени т [9.1]. Переходные процессы рассчитываются отдельно для каждой трапеции, имеющей свои значения Рд, йд, й и х. Определение h-функции производится по таблице для различных задаваемых значений т при реальных значениях х, соответствующих своей трапеции. Так как реальная трапеция отличается от единичной параметрами Р и Й, то построение графиков переходного процесса во времени производится путем пересчета масштабов. Для этого значении функции умножаются иа Pq: Анализ и синтез авяюмтизировашюго электропровода [Разд., а значения аргумента делятся на щ: Таким образом, рассчитываются графики переходного процесса для каждой трапеции у1 (О, М (О и й (О и строятся с учетом знака трапеции (расположение ее относительно оси Q по рис. 9.15, а). Алгебраическое суммирование ординат при определенных t и дает расчетную кривую переходного процесса системы (рис. 9.15, в). Полученная кривая переходного процесса у (О получена при единичном ступенчатом входном сигнале системы. Поэтомудля получения переходного процесса, соответствующего всему входному сигналу, масштаб по оси ордниат следует увеличить в соответствии со значением входного сигнала. Дрстониством частотного метода по сравнению с классическим и операторным является отсутствие необходимости нахоисде-ния корней, хотя на расчет действительной частотной характеристики затрачивается тоже немалое время. Это время можно уменьшить, если воспользоваться номограммой Р (Q) = E=f (L, 8), ио для этого должны быть рассчитаны ЛАЧХ и ФЧХ системы. К недостаткам метода можно отнести пониженную точность расчета, связанную с погрешностями графических построений н аппроксимации кривой прямолинейными отрезками. Нелинейные методы. В системах электропривода с нелинейными характеристиками и переменными параметрами переходные процессы описываются дифференциальными уравнениями вида (9.22), но коэффициенты ие остаются постоянными, а зависит от исследуемых переменных и переменных параметров. Решение дифференциальных уравнений с переменными коэффициентами производится нелинейными методами. Для анализа переходных процессов в системах электропривода из нелинейных методов расчета наибольшее распростраиеиие получили методы конечных приращений (метод Эйлера) и другие, построенные иа его основе; фазовой плоскости (канонических полигонов); математического моделирования. Метод конечных приращений (метод Эйлера) является приближенным методом иитегри-роваиия дифференциальных уравнений с переменными коэффициентами, описывающих переходные процессы в нелинейных системах с любым числом и видом нелинейностей, заданных аналитически или графически при условии возможности записи п дифференциальных уравнений первого порядка. Это характерно для систем электроприводов, звенья которых в основном описываются дифференциальными уравнениями первого порядка. Метод конечных приращений осиоваи иа допущении, что в малый промежуток времени At, называемый шагом интегрирования, все переменные системы и все их производные остаются постоянными, а прн нерехоДе к следующему шагу интегрирования меняются скачком. Если имеется дифференциальное уравнение то оно записывается в виде где Ах и - приращения переменной х и времени t. Принимая достаточно малый шаг интегрирования Af, иа котором значения переменной д: и ее производной считаются неизменными, определяют приращение переменной в конце шага интегрирования, например иа т-м шаге (9.30) Тогда значение фуикции на (т -f 1)-м шаге будет равно: Жт+1=Жт + Д*т. (9.31) Расчет начинается с.нулевого шага, где функция определяется известными условиями: 1= tg, ж = JCo- В системах электропривода переходные процессы описываются системой дифференциальных уравнений первого порядка, связанных между собой переменными. В этом случае все уравнения приводятся к виду (9.301 и решаются последовательно с учетом (9.31) для каждого шага интегрирования, на котором все переменные и их производные принимаются неизменными. Для расчета переходного процесса методом конечных приращений в электроприводе, схема которого приведена на рнс. 9.1, а, система расчетных уравнений на т-м шаге имеет следующий вид: Ут* ( Ут)=Рп или £ =/(Иу ); Пот im - л.. тде Зио,с - суммарный сигнал обратных связей, равный при обратной связи по скорости Suo.c = *сш; л - шаг интегрирования; Еа= f (Му) - нелинейная характеристика преобразователя. При изменении управляющего воздействия расчет начинается с приращения входного сигнала системы электропривода U3, Обычно данные расчета заносится в таблицу. Иногда для облегчения расчетои составляется расчетная схема, указывающая, с какого элемента системы электропривода
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


