
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств шинах. С помощью этих устройств производится интегрирование функций, зависящих как от времени, так и от любых других аргументов. Последнее является особенностью только электромеханических интеграторов. Электрические же интеграторы могут служить лишь для интегрирования функций, зависящих только от времени. Интеграторы широко используются в инерци-альных системах для вычисления координат движущихся объектов по измеренным скорости или ускорении (при двойном интегрировании) их движения. Простейшим электромеханическим интегратором может служить электродвигатель, у которого скорость вращения ротора (со) пропорциональна подаваемому на вход напряжению и (г), т. е. со = Кдвы(г), (23-43) где Кцв - коэффициент пропорциональности. Поскольку co=dcp/dr, то t Ф = фд + КДв f и (0 dt. (23-44) о Следовательно, при подаче на вход двигателя напряжения, отображающего некоторую функцию времени, угол поворота (ср) ротора двигателя будет пропорционален интегралу от этого напряжения. Для того чтобы уменьшить динамические ошибки, которые могут быть существенными в таком интеграторе, используют малоинерционный двигатель. В вычислительных устройствах наибольшее применение находят интеграторы, действие которых основано на использовании тахогенераторов. На рис. 23-48, а приведена схема интегратора с двумя тахоге-нераторами, обеспечивающая интегрирование функции у(х) по произвольному аргументу. Ротор тахогенератора 7Ti вращается по закону изменения аргумента х функции у(х). На выходе этого тахогенератора включен потенциометр, движок которого перемещается по закону подынтегральной функции у(х). Тахогенератор ТГ% вместе с усилителем и сервомотором СМ образуют систему отработки имеющегося рассогласования Ди= = тг2-итг1 в угловую скорость (со) вращения ротора тахогенератора 7Т2. В результате такой отработки угол (ср) поворота ротора тахогенератора ТГ2 будет равен: х ср = <р0 + К J у (х) dx. (23-45) Следовательно, при таком интегрировании функции у(х), задаваемой в виде перемещения движка потенциометра интеграл получается в виде угла поворота ротора тахогенератора ТГ2 (сервомотора). Интеграторы с двумя тахогенератора-ми используются для вычисления интеграла от функции, обратной заданной. Для этого достаточно произвести переключение си- стемы отработки в схеме интегратора, приведенной на рис. 23-48, а. Такое переключение показано на рис. 23-48, б. Тахогенератор 7Ti (рис. 23-48, б) приводится в движение от сервомотора. Угол поворота его 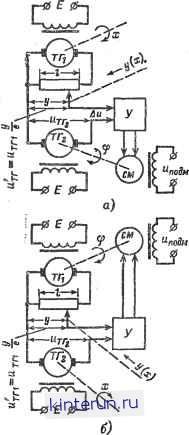 Рис. 23-48. Схемы интеграторов. а - с двумя тахогенераторами; б - инверсионного. ротора обозначен через (р. Нагрузкой ГА является потенциометр. Ротор тахогенератора ГА вращается по закону изменения аргумента х функции у(х). Движок потенциометра перемещается по закону функции у(х). Напряжение на выходах тахогенераторов будет: dcp dx UTrl = К ,. ; тг2 = К . dt dt После отработки установится равенство и= у (Х) Так как и = ытг1 --- , то kL - irJ?*- у№ К dt ~К dt I Из последнего соотношения следует, что Поэтому С dx Следовательно, угол ф поворота ротора тахогенератора 7Ti пропорционален интегралу от функции, обратной заданной. Интегратор с переключенной схемой отработки называется инверсным интегратором. Подобные интеграторы позволяют производить интегрирование по любому аргументу, в том числе и по времени. Можно, например, получать элементарные функции путем интегрирования дифференциальных уравнений, для которых, эти функции являются решением. Так, например, может быть вычислена функция логарифма. с 1 dip I Ьсли ф=1п х, то-=-и вычисление dx х логарифма сводится к интегрированию величины 1/х. Это можно сделать с помощью инверсного интегратора, положив в нем у(х) =ах; где а - постоянный коэффициент. На основании окончательного соотношения, полученного для инверсного интегратора, можно записать: Ф = Фо + - In - - (23-47) а Хд При начальных условиях х0-1 и Фо=0 угол поворота ротора тахогенератора ГР4 будет равен: ф= - In х. Если выбрать 1/а= = 1, то угол ф будет равен натуральному логарифму величины х. В случае, если положить l/a=\ogb е, ф=1о£ь х, где Ь - основание логарифмов. Таким же способом могут быть вычислены тригонометрические, гиперболические и другие функции. 23-7. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ Электромашинные усилители используются в системах автоматического регулирования для усиления мощности управляющих сигналов. Такой усилитель состоит из приводного двигателя н генератора постоянного тока. Энергия приводного двигателя превращается в энергию выходного сигнала. При этом управление преобразованием энергии производится путем регулирования величины тока в катушках возбуждения генератора. В качестве приводного двигателя может использоваться двигатель любого типа. Обычно это электрический двигатель по- стоянного тока, имеющий общий с генератором вал. На рис. 23-49, а приведена схема одно-каскадного электромашинного усилителя. В этом усилителе входной величиной является напряжение, подводимое к обмотке 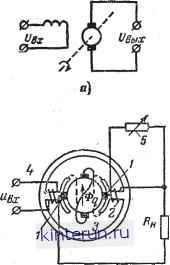 Рис. 23-49. Схемы электромашииных усилителей. а - однокаскадного; 6 - двухкаскадного (с поперечным полем). возбуждения, а выходной - э. д. с. в цепи якоря генератора. Коэффициент усиления К усилителя по напряжению в режиме холостого хода равен: и Е>я /С = ГУ----, (23-48) у 60 wy где я - скорость вращения, об/мин; w - число активных проводников в якоре; шу - число витков обмотки управления; 7 у = =LTIRy - постоянная времени управляющей обмотки генератора; Ly, Ry - индуктивность и активное сопротивление управляющей обмотки. Максимальное усиление по мощности обеспечивается при равенстве нагрузки и внутреннего сопротивления усилителя со стороны выхода. При усилении гармонических сигналов условием максимального усиления по мощности является равенство сопротивления нагрузки выходному характеристическому сопротивлению усилителя. Ненагруженный однокаскадный электромашинный усилитель, в котором входной величиной является управляющее напряжение, подводимое к обмотке возбуждения, а выходной - э. д. с. в цепи якоря, по своим динамическим свойствам эквивалентен инерционному звену. Его передаточная функция в операторной форме в этом слу-чае представляется выражением где Ку - коэффициент усиления усилителя по направлению; Ty=Ly/Ry- постоянная времени усилителя; Ly, Ry - индуктивность и омическое сопротивление обмотки возбуждения; D=d/dt- символ дифференцирования. Наибольшее применение в системах автоматического регулирования находит двухкаскадный электромашинный усилитель с поперечным полем. В этом усилителе два каскада электромашинных усилителей конструктивно объединены в одноякор-ном генераторе. При этом полем возбуждения второго каскада является поперечное магнитное поле якоря. Электромашинный усилитель с поперечным полем представляет собой двухполюсную машину с двумя парами щеток (рис. 23-49,6). Одна пара щеток (/-/) расположена по продольной оси (вдоль магнитных силовых линий, создаваемых обмоткой возбуждения 4) машины, а 3-3 замкнута накоротко. При подаче управляющего сигнала в обмотку возбуждения возникает магнитное поле, направленное вдоль продольной оси машины. За счет этого поля в обмотке вращающегося якоря наводится э. д. с, вызывающая ток в цепи короткозамкнутых щеток 3-3. Сопротивление цепи короткозамкнутых щеток мало, поэтому при наличии усиления по мощности ток в этой цепи получается значительным даже при малом токе возбуждения. Ток, протекающий по цепи коротко-замкнутых щеток, создает магнитный поток Фд, направленный по поперечной оси (в направлении, перпендикулярном магнитному потоку, создаваемому обмоткой возбуждения) машины. Поперечный магнитный поток является потоком возбуждения для продольной оси машины. Наводимая за счет этого потока э. д с снимается щетками /-/ и является выходной величиной электромашинного усилителя. К щеткам /-/ подключается нагрузка. Ток нагрузки протекает по обмотке возбуждения 2, создающей положительную обратную связь по магнитному потоку между выходом и входом усилителя. Эта обратная связь вводится для компенсации отрицательной обратной связи, вызываемой пого- ком реакции якоря. Наличие положительной обратной связи в электромашинном усилителе с поперечным полем значительно увеличивает коэффициент его усиления. Ненагруженный двухкаскадный электромашинный усилитель имеет передаточную функцию, эквивалентную передаточной функции двух последовательно включенных инерционных звеньев. Электромашинные усилители применяются в качестве оконечных усилителей сигналов управления со значительной выходной мощностью. Диапазон номинальных мощностей электромашинных усилителей составляет от нескольких десятков ватт до десятков киловатт. 23-8. ИСПОЛНИТЕЛЬНЫЕ (ОТРАБАТЫВАЮЩИЕ) УСТРОЙСТВА В системах автоматического регулирования исполнительными устройствами называются механизмы, преобразующие управляющий электрический сигнал в механическое перемещение регулирующего органа. Исполнительные устройства используются для включения и отключения механических, пневматических, гидравлических и других цепей, а также для плавного перемещения или поворота частей регулируемых органов на углы, зависящие от полярности и величины управляющего электрического сигнала. Режим работы исполнительных устройств существенно отличается от режима работы устройств привода В устройствах привода механизм работает в установившемся режиме или повторно-кратковременно. Исполнительные же устройства систем автоматики работают в режиме непрерывных случайных колебаний. Эти колебания обусловливаются совокупностью действующих на систему регулирования управляющих и возмущающих воздействий. Таким образом, работа исполнительных устройств протекает в основном в переходных режимах, что требует понижения инерционных сил и моментов, действующих в них с целью улучшения динамических свойств. Совершенство системы автоматического регулирования, ее надежность и быстродействие, качество переходных процессов и эксплуатационные свойства в значительной степени зависят от выбора исполнительного устройства. В качестве электромеханических исполнительных устройств в системах автоматического регулирования используются обычно различные по конструкции электромагнитные механизмы и электродвигатели постоянного и переменного тока. Электродвигатели в исполнительных устройствах называют сервомоторами. Электрические двигатели исполнительных устройств К электродвигателям исполнительных устройств предъявляются определенные требования. Основными из них являются: широкий диапазон изменения скорости вращения и простота ее регулирования; малая инерционность; небольшой момент трения; малые габариты и вес при достаточной мощности на валу двигателя и т. п. Наибольшее распространение в автоматике и вычислительной технике находят
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


