
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Симметрирование с применением двух статорных катушек называется первичным симметрированием. Часто используется так называемое вторичное симметрирование, при котором ротор имеет две взаимно перпендикулярные обмотки (рис. 23-43, в), подключаемые к равным нагрузкам (Z=ZH). В этом случае результирующий боковой Сложение скалярных величии В операциях сложения скалярных величин применяются обычно мостовые и по-тенциометрические устройства. На фис. 23-44, а приведена схема моста на резисторах для выполнения операции сложения. 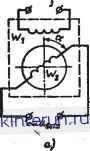 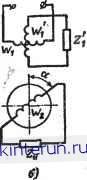
Рис. .23-43. Схемы вращающихся трансформаторов. а - без симметрирования; б - с первичным симметрированием; вторичным симметрированием магнитный поток, образуемый за счет протекания токов нагрузки через катушки ротора, оказывается равным нулю. Вращающийся трансформатор с двух- . обмоточным ротором позволяет получить два выходных напряжения, пропорциональных синусу и косинусу угла поворота ротора Для увеличения точности воспроизведения синусно-косинусных функций в виде выходных напряжений часто применяют двустороннее симметрирование, при котором как на статоре, так и на роторе имеется по две взаимно перпендикулярных обмотки. Включаются онн так же, как это показано на рис. 23-43, б, в. Современные вращающиеся трансформаторы воспроизводят выходное напряжение как функцию угла поворота оси ротора с ошибкой порядка 1% от максимального значения выходного напряжения. 23-6. УСТРОЙСТВА ДЛЯ ВЫПОЛНЕНИЯ МАТЕМАТИЧЕСКИХ ОПЕРАЦИЙ Электромеханические устройства в вычислительной технике наиболее часто используются для суммирования, умножения и деления скалярных величин, а также в качестве дифференцирующих и интегрирующих устройств. Резисторы Rt и R2 постоянные, резистор R2 состоит из п последовательно включенных линейных переменных резисторов, Rz - переменный линейный резистор. В измерительную диагональ моста включен нуль-индикатор. На приведенной схеме обозначены через х21, х22..... х2п, х3 координаты движков резисторов, а через l2i, /22, 12п, 1Ъ - полные длины обмоток резисторов R2i, R22, Rzn, Rs- Для переменных резисторов в зависимости от значения положения (координаты) движка будут справедливы соотношения: &2i #з = ~7~*3 = 3*3 h где £=1, 2, п; K2i = R2i/ki\ Ks=R$/h-Из условия равновесия моста можно за-Ri писать i?3=-г?2, но так как >?2=.r?2i-r-Ri +R22+...+R2n, то Величины переменных резисторов могут быть заменены в полученном выражении перемещениями движков х3 = v (К21 *21 + К22 -*22 + -j + Kin X2tt) При УСЛОВИИ, ЧТО К21=К22 = ... = К2п=К3 и R\=R4, можно писать: (23-34) Из последнего соотношения следует, что суммарное перемещение всех двнжков резисторов, входящих в плечо моста R2, при тически. Результат сложения получают обычно автоматически с использованием следящей системы на рис. 23-44, б, в которую входят сервомотор и усилитель, подключаемый входом в измерительную диагональ суммирующего моста. Ротор мотора через редуктор механически связан (связь показана на схеме пунктирной линией) с подвижным контактом 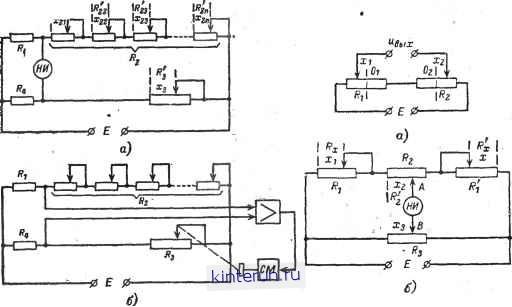 Рис. 23-44. Мостовые схемы сложения. а - с ручной отработкой результата; б - с автоматической отработкой результата. 23-45. Схемы потенциометрических устройств сложения. а - простейшая из двух потенциометров, включенных последовательно; б - мостовая. балансе моста равно перемещению двнжка резистора /?3. Следовательно, по положению движка резистора R3 в момент баланса моста можно определить суммарное перемещение движков резисторов R2i, R22, Rzn- В этом и заключается операция сложения. Рассмотренная мостовая схема позволяет суммировать, по существу, величины сопротивлений и связанных с движками этих сопротивлений перемещений механических элементов. При этом может выполняться суммирование величин (механических перемещений) только постоянного знака Это объясняется тем, что начало отсчета координат x2i и х3 принято в крайних положениях движков резисторов. В случае, если отсчет смещений движков производить от средних точек резисторов R2i и /?3 (баланс моста перед началом измерений достигается при нахождении движков R2i и /?3 в средних точках резисторов), рассмотренная схема позволяет производить суммирование знакопеременных величин. Ввод слагаемых в суммирующую схему может производиться вручную или автома- (движком) сопротивления Rs. В процессе операции суммирования, когда изменяется положение движков резисторов- R2i, R22, -, R2n, происходит разбалансировка мостовой схемы. На входе усилителя появляется сигнал рассогласования, который после усиления воздействует на сервомотор. Ротор сервомотора приходит во вращение и перемещает движок потенциометра Rs. Направление вращения ротора выбирается таким, чтобы с перемещением двнжка уменьшалась степень разбалансировки моста. Сервомотор будет вращаться до тех пор, пока мост не сбалансируется. По положению движка резистора Rs в этом случае можно отсчитать суммарное перемещение движков сопротивлений R2i, R, R2n. Для сложения скалярных величин широко используются потенциометрические схемы, которые позволяют в отличие от мостовых схем суммировать не сопротивления, а напряжения. На рис. 23-45, а приведена схема потенциометрического сумматора величин Xi и х2. Сопротивления потенциометров Rt и R2 в этой схеме включены последовательно в цепь источника питания (источник может быть постоянного и переменного напряжения). Начало отсчета перемещений движков выбирается в средних точках потенциометров. При этом суммируемые перемещения Xi и х2 могут быть знакопеременными. Выходное напряжение такого суммирующего устройства вых определяется из следующего соотношения: Rx+R2 (% + хъ) 1 к= i = i (23-35) В правой части приведенного выражения имеются два слагаемых, одно из них Е/2 не зависит от суммируемых перемещений, КЕ а второе г-r~ (*а + х2) пропорционально сумме двух величин Xi и х%. К недостаткам подобного суммирующего устройства относятся зависимость точности отсчета результата суммирования от стабильности напряжения источника пита ния и необходимость компенсации выходного напряжения на величину Е/2, не зависящую от суммируемых величин. Помимо того, в рассмотренном потенциометрическом суммирующем устройстве нельзя применить простую систему автоматического суммиро вания, так как потенциалы точек подвижных контактов изменяются в зависимости от значений суммируемых величин Xi и х2. Применяются потенциометрические мостовые суммирующие устройства, которые свободны от указанных выше недостатков. На рис. 23-45, б приведена схема одного из таких устройств, рассчитанных на суммиро вание двух переменных Xi и х2. Слагаемое Xi вводится в схему путем одновременного перемещения движков двух равных по величине сопротивлений Ri и R\ (Ri=Ri). Эти сопротивления включены в схему моста так, что при любом значении слагаемого Xi сумма Rx+Rx = Ri остается неизменной. Второе слагаемое вводится в схему в виде перемещения х2 движка потенциометра R2. Балансировка моста производится перемещением хг движка потенциометра г?3. При равновесии моста перемещения движков потенциометров, входящих в схему, связываются между собой следующим соотношением: X3 = /Ccx(Xi + Хг), где КСх = К Ri + R2 масштабный коэффициент при условии, что (23-36) перемещений Xi и х2 и не зависит от питающего напряжения, а следовательно, и стабильности последнего. Если элементы схемы моста выбрать так, что R±=R2 и h = = h = ls/2, то масштабный коэффициент будет равен единице (Ксх = 1), следовательно, X3 = Xi + X2. Для суммирования с помощью подобного устройства знакопеременных напряжений необходимо отсчет этих перемещений производить от средних точек потенциометров. Сложение трех и более величин может производиться аналогичной потенцио-метрической мостовой схемой. При этом число двойных потенциометров, используемых в схеме, для сложения п скалярных величин должно быть равно п-1. Умножение и деление В качестве простейшего умножающего устройства в вычислительных машинах широко используется потенциометр. При этом потенциометр (рис. 23-46, а) питается напряжением, пропорциональным одному из сомножителей их, а его подвижный контакт с помощью следящей системы смещается на величину, пропорциональную второму сомножителю иу. В результате выходное напряжение будет пропорционально произведению вида вых = Ktlxtly, их, иу - перемножаемые величины; К - масштабный коэффициент. Из приведенного выражения следует, что перемещение х3 пропорционально сумме Подобные устройства обеспечивают умножение с точностью 0,1%. Для умножения и деления применяются мостовые потенциометрические схемы. На-рис. 23-44, б приведена мостовая схема для умножения двух величин, задаваемых в ви де перемещения движков резисторов R2 и Rt. Из условия равновесия моста можно записать: #3 = 2 4 . а для перемещений %з ~ Ксх %2 где лсх= т;-~- - масштабный коэф- Ri К3 фициент; К2 = R2/h; Кз- = Rz/h; Kt = Ri/k. Величина масштабного коэффициента Ксх путем подбора параметров элементов схемы моста- может выбираться в широких пределах. Произведение величин х2х4 получают в подобных схемах автоматически, путем перемещения движка потенциометра R3 сервомотором, включенным через усилитель в измерительную диагональ мостовой схемы (рис. 23-46,6). Рассмотренная мостовая схема может использоваться для деления одной величи-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


