
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств В случае, если выход потенциометра нагружен, для воспроизведения заданной функции выходного напряжения сопротивление Rx (участка потенциометра х) при смещении движка должно изменяться по более сложному закону [ х\ (23-27) Функциональные потенциометры применяются для воспроизведения знакопеременных и немонотонных функций. На рис. 23-38, в приведена схема для воспроизведения монотонной функции, проходящей через нуль. В этом случае выходом потенциометра служат подвижный контакт и средняя точка намотки потенциометра. Другая схема потенциометра (рнс. 23-38, г) позволяет получить немонотонную зависимость выходного напряжения от смещения подвижного контакта. За счет включения добавочного сопротивления Рд обеспечивается воспроизведение значения функции f(x MaKc) на участке обмотки ОВ. Для реализации нелинейной зависимости могут применяться линейные потенциометры. На рис. 23-39, а приведена схема нелинейного преобразователя угла повороту некоторого вала в напряжение с применением линейного потенциометра и кулачка, обеспечивающего неравномерное перемещение подвижного контакта. Необходимый закон движения контакта достигается подбо-ром формы кулачка. Для воспроизведения нелинейных зависимостей широко используются линейные потенциометры с постоянными сопротивлениями, шунтирующими отдельные участки обмотки потенциометра (рис. 23-37,6). Число шунтирующих сопротивлений определяется характером функциональной зависимости и потребной точностью ее воспроизведения. Чем меньше должна быть ошибка воспроизведения, тем больше шунтов необходимо. Расчет длин участков U, на которые необходимо разбить весь интервал изменения х, производится обычно графическим способом. При этом по обе стороны графика заданной функции на расстоянии, равном допустимой погрешности б, проводят две кривые (рис. 23-39, в). Между этими кривыми вписывается ломаная линия, состоящая из возможно меньшего числа прямолинейных отрезков, не выходящих за пределы пунктирных линий. Если ломаная линия построена таким образом, то ошибка аппроксимации во всем диапазоне изменения ар- гумента не будет превосходить максимально допустимого значения б. Напряжение на выходе шунтированного по участкам потенциометра будет изменяться в зависимости от перемещения х движка по закону ломаной линии, которая аппроксимирует заданную функцию f(x). Механическая связь  Куличок Линейный потенциометр 0> -0 Е & 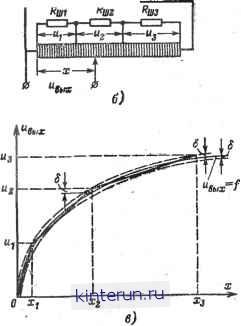 Рнс. 23-39. Использование линейных потенциометров для воспроизведения нелинейной зависимости. а - с применением кулачковой передачи; б-с применением шунтирующих резисторов; в - к расчету шунтирующих резисторов. Шунтированные потенциометры позволяют воспроизводить монотонные функции двух независимых переменных Z=f(x,y). В таких случаях вместе с перемещением подвижного контакта потенциометра, положение которого характеризуется текущим значением одной переменной х, изменяется в соответствии с изменением другой переменной у сопротивление шунтов. Устройства для воспроизведения тригонометрических функций Для воспроизведения тригонометрических функций наиболее широкое применение нашли синусно-косинусные потенциометры и вращающиеся трансформаторы. Входной величиной указанных преобразователей является угол поворота - в первом случае 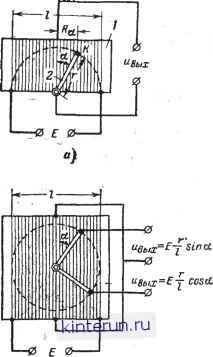 Рис. 23-40. Синусно-косинусные потенциометры. а - с одним подвижным контактом; б - с двумя подвижными контактами. подвижного контакта потенциометра, а во втором - оси ротора. С выхода обоих типов устройств снимается напряжение, отображающее воспроизводимую функцию. С и н у с н о-к осинусные потенциометры. Функции синуса и косинуса наиболее часто воспроизводятся с помощью линейных потенциометров, намотанных на прямоугольных каркасах с равномерной намоткой и неравномерным движением контакта. Потенциометр подобного типа (рис. 23-40, а) состоит из каркаса с намоткой 1 и вращающего движка 2 с контактом К. Последний располагается на расстоянии г от оси вращения. Если движок находится в вертикальном положении, то напряжение на выходе потенциометра равно нулю. С отклонением двнжка на угол ос выходное напряжение Ивы! равно падению напряжения на сопротивлении Ra: /\п х *a = -j-. (23-28) где R0 - сопротивление обмотки потенциометра. х = г sin а - абсцисса точки К. Иначе, Ra = -j- sin а. (23-29) Из последнего выражения следует, что сопротивление Ra с поворотом движка потенциометра изменяется по синусоидальному закону. Величина выходного напряжения для ненагруженного потенциометра в зависимости от величины угла а поворота движка будет определяться соотношением вых = Е - sin а. (23-30) В случае, если угол а отсчитывать не от вертикальной, а от горизонтальной оси, выходное напряжение будет пропорционально косинусу угла а. Часто вместо одного подвижного контакта в подобных потенциометрах используют два, располагая их на двух взаимноперпен-дикулярных движках (рис. 23-40, б). Такое устройство позволяет одновременно получать два выходных напряжения. Одно из них пропорционально синусу угла а поворота оси потенциометра, а другое пропорционально косинусу того же угла. В синусно-косинусных потенциометрах трудно крепить виткн обмотки при большой высоте каркаса, что является их конструктивным недостатком. Они, кроме того, -обладают сравнительно низкой точностью при углах, близких к 90°, из-за ступенчатости изменения сопротивления при повороте подвижного контакта. Зона нечувствительности Дао в синусно-косинусном потенциометре определяется из выражения /2d - [град], где d- диаметр проволоки. Так, например, прн d=0,05 мм и г= =30 мм Да0=3,3°. Тангеисно-к отангенсные потенциометры. Схема электромеханического устройства для воспроизведения функции тангенса и котангенса приведена на рис. 23-41. В это устройство входят линейный потенциометр 2 и щетка 1, вращающаяся вокруг оси О. Ось вращения удалена от потенциометра на расстояние Ь. Если прямая OF перпендикулярна к оси сопротивления, то при повороте щетки 1 на угол а от прямой OF величина выходного напряжения может быть определена по формуле . = £- х - Ъ tg а. но так как х=Ь seca, то Ъ I Поэтому tga. (23-31) При отсчете угла а от оси потенциометра выходное напряжение будет пропорционально котангенсу угла поворота щетки. 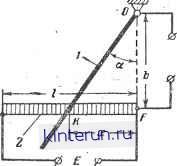 Рис. 23-41. Тангенсно-котангенсныя потенциометр. Существенным недостатком тангенсно-ко-тангенсных потенциометров является их большая погрешность с увеличением угла а (рис. 23-41).  и8ых~£Т шл HiiiHKrtlmiiiHiitmiiiigl S h- *-rl --0 £ &-- Рис. 23-42. Секансный потенциометр. На рис. 23-42 приведена схема секан-сного потенциометра. Сопротивление 2 потенциометра линейно и с равномерной намоткой провода. Щетка 1 выполнена в виде прямой АК, вращающейся относительно точки О и удаленной от нее на расстояние Ь. Выходное напряжение такого потенциометра в зависимости от угла поворота а будет изменяться в следующем соотношении; вых - Е seca. (23-32) При больших углах а секансный потенциометр дает существенные ошибки. В пределах же а=0-=-40° функция секанса воспроизводится с ошибкой, не превышающей 1%. Вращающийся трансформатор Этот прибор представляет собой устройство, состоящее из двух индуктивно связанных между собой обмоток (рис. 23-43, а). Одна из этих обмоток - роторная, может поворачиваться относительно другой обмотки. Первичная неподвижная обмотка располагается на статоре. Если ее подключить к источнику переменного напряжения и0, то во вторичной обмотке будет наводиться э. д. е., величина которой зависит от взаимного положения обмоток. Эта зависимость без учета влияния ре- . акции тока нагрузки, протекающего по роторной обмотке, определяется следующим соотношением:. Uo-sma, (23-33) где Wi, W2 - количество витков соответственно первичной и вторичной обмоток. Если отсчет угла а производить от горизонтальной оси, то амплитуда выходного напряжения,- снимаемого с зажимов роторной обмотки, будет пропорциональна косинусу угла а. С увеличением нагрузки, подключаемой к выходу вращающегося трансформатора, синусоидальная форма выходного напряжения искажается и нарушается приведенная выше зависимость этого напряжения от угла поворота роторной обмотки. Для ликвидации искажений выходного напряжения составляющая магнитного потока, возникающего под действием тока нагрузки, компенсируется. Такая компенсация называется симметрированием вращающегося трансформатора. Наиболее распространенным методом симметрирования является использование двух статорных катушек, расположенных перпендикулярно друг к другу (рис. 23-43,6). Одна из обмоток статора (Wi) питается от источника переменного напряжения, другая же (Wi) нагружается некоторым сопротивлением Z\. В обмотке Wt за счет индукции наводится э. д. с. и проте-. кает ток. Магнитный поток, создаваемый обмоткой Wi, взаимодействует с магнитным потоком обмотки W2. При правильно подобранном сопротивлении Zi указанные потоки будут взаимно компенсироваться. Вследствие этого даже при значительной нагрузке вращающего трансформатора его выходное напряжение не будет искажено.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


