
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств нои величиной при этом служит напряжение, снимаемое с роторной обмотки сельсина-приемника. Работает сельсинная передача следующим образом. При пропускании переменного тока через роторную катушку сельсина-датчика ею будет создаваться пульсирующий по величине магнитный поток Ф, вектор 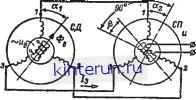 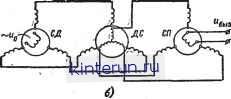 Рис. 23-36. СельсиниЫе передачи. а - обычная; б - дифференциальная; 1, 2 и 3 - катушки статора. которого будет направлен вдоль оси полюсов ротора. В том случае, если ось ротора сельсина-датчика повернута на угол cti относительно одной из катушек статорной обмотки (рис. 23-36,а), в трех катушках статора, имеющих равное число витков, наве-дутся синфазные э. д. с, амплитудные значения которых равны: £, = Ет cos аг, £2 = Em cos(120+ ai); £3 = £mcos(240 + ai), где £i, £2 и £3-амплитудные значения э. д. с, наводимых в соответствующих катушках статора; Ет- амплитудное значение э. д. с, наводимой в катушке статора в том случае, когда ось полюсов ротора совпадает с осью этой катушки статора (at=0). Если параметры всех трех статорных катушек одинаковы, то э. д. с. £ь £2 и £3 вызовут в этих катушках соответственно токи Д, /2 и /3: £i £2 , Е3 h~ Z Z Z где Z- сумма полных сопротивлений двух статорных катушек: катушки сельсина-датчика и соединенной с нею катушки сельсина-приемника. Поскольку токи в одноименных фазных катушках статоров одинаковы, то результирующее магнитное поле, создаваемое статорной обмоткой сельсина-приемника, имеет такое же относительное направление, как и поле роторной катушки сельсина-датчика, т. е вектор магнитного поля статора сельсина-приемника образует с осью соответствующей катушки (в данном случае первой) такой же угол a2 = ai, как и ось ротора в сельснне-датчике. Если ось полюсов ротора сельсина-приемника совпадает с направлением результирующего вектора магнитного поля статора, то в катушке ротора сельсина-приемника будет наводиться максимальная э. д. с. Следовательно, при разности относительных углов поворота ротора, отсчитываемых от осей соединенных статорных катушек, равной нулю, напряжение на выходе сельсина-датчика максимально. При разности относительных углов поворота роторов, равной я/2 (ось полюсов ротора сельсина-приемника перпендикулярна результирующему вектору магнитного пбля статора), напряжение на выходе сельсина-приемника равно нулю. Такое положение ротора называется нейтральным. В системах стабилизации и следящих системах разность относительных углов поворота Да (рис. 23-34, а) удобно отсчитывать от нейтрального положения (Да=р). В этом случае напряжение на зажимах роторной обмотки сельсина-приемника пропор ционально минусу угла рассогласования вых = К sin Да. (23-22) При малых углах рассогласования ыЕнх = /СДа, (23-23) где К - чувствительность сельсинной передачи, в/град. Чувствительность системы может быть повышена за счет установки редуктора между валами следящей системы и роторами сельсинов Если ротор сельсина-прнемника затормозить в некотором положении, то по величине выходного напряжения можно судить об угле поворота ротора сельсина-датчика относительно заторможенного положения ротора сельсина-приемника. Изменение на- правления поворота ротора сельсина-датчика сопровождается изменением фазы выходного напряжения. Поэтому фиксировать направление относительного поворота роторов сельсина датчика можно с помощьк* фазовых дискриминаторов. Выходное напряжение нагруженного сельсина-датчика в установившемся режиме определяется следующим выражением: вых = --Z К sin Да, (23-24) вых г 2Н где 2Вых - внутреннее сопротивление сельсина-датчика; ZH- сопротивление датчика на-1 , грузки. На роторы сельсина-датчика и сельсина-приемника (с явно выраженными полюсами) действует момент, стремящийся установить оси полюсов роторов по магнитному потоку, т. е. устранить относительный поворот роторов сельсинной системы. В случае, если выход сельсина-приемника нагружен, появляется дополнительный момент, направленный также в сторону согласования. Сумма двух указанных моментов образует так называемый синхронизирующий момент сельсинов. Этот момент максимален при Да=0 и обращается в нуль прн Да=90 или 270°. При работе сельсина-датчика в трансформаторном режиме синхронизирующий момент оказывается малым. Если роторную обмотку сельсина-приемника подключить не к нагрузке а к тому же источнику питания, куда подключена н роторная обмотка сельсина-датчика, то синхронизирующий момент оказывается значительно большим. Такой режим работы называют индикаторным. Под действием синхронизирующего момента ротор сельсина-приемника поворачивается в соответствии с поворотом ротора сельсина-датчика. Индикаторный режим работы сельсинов используется для дистанционной передачи показаний приборов, а более мощные сельсины могут применяться в этом режиме для дистанционного управления. Во многих практических случаях необходимо изменять нулевое положение сель-сииа-датчика. Для выполнения этого условия используются так называемые дифференциальные сельсины (ДС). В дифференциальном сельсине ротор и статор имеют трехфазные обмотки. Роторы таких сельсинов имеют неявно выраженные полюсы. Питание обмоток производится посредством включения трех колец и щеток. Схема включения дифференциального сельсина показана на рис. 23-36, б. Статор-ная обмотка соединяется, трехпроводной линией со статорной обмоткой сельсина-датчика, а роторная - со статорной обмоткой сельсина-приемника. Вал ротора дифференциального сельсина соединяется с выходной осью приспособления или устройства, служащего для задания нулевого положения. Момент трения, создаваемый за счет трения токоподводяших щеток о контактные кольца, является существенным недостатком, не позволяющим вращать сельсины с помощью чувствительных элементов (например, магнитоэлектрических прибо-ров ц В настоящее время широко применяются бесконтактные сельсины, в которых ротор имеет Z-образную форму (рис. 23-37, а). Он выполнен из мягкой стали. Ось ротора проходит через центр неподвижной катушки, питаемой переменным током. Магнитный поток, создаваемый этой катушкой, проходя через ось и лепестки ротора, замыкается 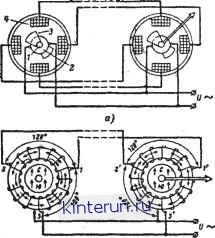 Рис. 23-37. Схемы бесконтактных дистанционных передач. а - сельсиииой {1 - ротор; 2 - катушка; 3 - лепестки ротора, 4 - статорные катушки); б-маг-несннной. по стальным кольцам, пересекая при этом витки статорных катушек. Направление магнитного поля определяется формой и направлением лепестков ротора. При повороте ротора в пространстве будут изменяться величины э. д. с наводимых в катушках статорной обмотки. Таким образом, бесконтактный сельсин будет работать так же, как и сельсин с контактной парой. Бесконтактные сельсины могут выполняться с очень незначительными моментами трения. Магнесинная дистанционная передача является системой индукционной синхронной связи, включающей два одинаковых по конструкции магнесина-датчика и приемника, соединенных линией связи. На рис. 23-37, б приведена схема магнесинной передачи. Эта система дистанционной пере-чи отличается простотой своей конструкции, ввиду чего она получила значительно большее распространение, чем, например, дистанционная передача- с неконтактными сельсинами. Каждый из магнесинов представляет собой кольцо, набранное из листов пермаллоя, на котором равномерно по окружности намотана статорная обмотка, имеющая отводы. Два отвода, отстоящие от концов обмотки на ±120° у приемного и передающе- го магнесннов, соединены проводами линии связи. Конца обмоток обоих сельсинов присоединяются к источнику переменного нап-пряжения с частотой 400-500 гц. Подвижным элементом каждого из магнесинов передачи служит цилиндрический постоянный магнит, устанавливаемый на опорах внутри сердечника. Если предположить, что постояииого магнита в сердечнике нет, то напряжение питания, подводимое к обмоткам магнесинов, будет делиться на три равные-части. Магнитный поток, образуемый обмоткой, в каждом из магнесинов будет замыкаться только по сердечнику. С внесением постоянного магнита в сердечник в обмотках магнесинов, кроме синусоидальной составляющей тока, появляется постоянная составляющая и составляющая удвоенной частоты. Это объясняется тем, что магнитный поток постоянного магнита, замыкающийся по сердечнику статора, в этом случае будет переменным по величине и вызовет соответствующие э. д. с. в обмотках. При одинаковых положениях роторов датчика и приемника наводимые э. д. с. в соответственных фазных обмотках 1-2-2 и 3-3 будут равными по величине и противоположными по направлению. В результате уравнительных токов не будет. В случае, когда ротор датчика повернут на некоторый угол относительно ротора приемника, равновесие э. д. с. двойной частоты будет нарушено. При этом появятся уравнительные токи. Разностный переменный магнитный поток двойной частоты, который замыкается через постоянный магнит, создаст в приемном магнесине вращающий момент. Этот момент будет стремиться привести ротор приемника в положение, одинаковое с ротором датчика. Точность дистанционных магнесинных передач достигает от ±1,5 до ±2,5°. личины механического перемещения подвижного контакта (рис. 23-38, а) Bbnc = £/(-f-) (23- где х-линейное перемещение подвижного контакта; /- общая длина обмотки сопротивления. -0
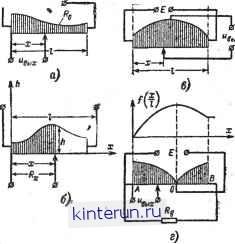 Рис. 23-38. Функциональные потенциометры. а - схема; б - к расчету высоты каркаса потенциометра; е - потенциометр для воспроизведения знакопеременной функции; г - потенциометр для воспроизведения немонотонной функции. 23-5. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА С помощью функциональных устройств обеспечивается воспроизведение заданной нелинейной функции одного или нескольких переменных. Функциональные устройства в системах автоматики и вычислительной техники используются для: выполнения математических операций с механическими величинами; преобразования механической величины в функционально связанную электрическую величину; выполнения математических операций с электрическими величинами. Функциональные потенциометры Функциональные потенциометры являются наиболее распространенными простейшими функциональными устройствами электромеханического типа. Выходное напряжение потенциометра ыЕых изменяется по закону заданной функции f(xll) от ве- Для обеспечения заданной зависимости выходного напряжения от перемещения движка у ненагруженного потенциометра необходимо, чтобы сопротивление Rx участка х потенциометра (рис. 23-38, б) изменялось по аналогичному закону Rx=Rof(-j-)- При равномерной намотке проволоки на каркас потенциометра требуемая зависимость изменения сопротивления Rx будет достигнута, если высота каркаса h с перемещением движка будет изменяться по закону (23-26) т. е. прямо пропорционально производной от воспроизводимой функции. В этом выражении d - диаметр проволоки, а р<> - ее удельное сопротивление. 62999999905
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


