
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств 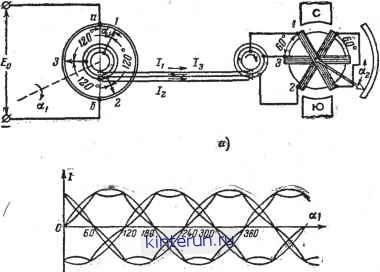 Рис. 23-34. Дистанционная передача на постоянном токе с круговым потенциометром иа входе и лагометром на выходе. а - схема; б - графики токов в катушках лагометра. На левой части рисунка /, 2, S - подвижные контакты, а на правой части рис. соответствующие им катушкн. сигнала и индикатором угла поворота. Отклонение стрелки гальванометра в определенном масштабе будет соответствовать углу.поворота оси потенциометра. Если параметры передачи подобрать гак, чтобы выполнялось условие К R + R С AR (23-16) то углы поворота оси потенциометра ctj и отклонения стрелки гальванометра а будут равны (ai=a), здесь К - коэффициент пропорциональности между током через катушку гальванометра / и моментом вращения, создаваемым катушкой; С - коэффициент пропорциональности между углом поворота рамки гальванометра и противодействующим моментом, создаваемым пружиной; RB - сопротивление катушки гальванометра совместно с сопротивлением линии связи; R - полное сопротивление обмотки потенциометра; AR/Aa - удельное сопротивление обмотки потенциометра, приходящееся на единицу угла поворота подвижного контакта. Другая схема простейшей потенцией ет-рической передачи приведена на рис. 23-33, б. В отличие от схемы на рис. 23-33, а потенциометрический датчик угла поворота включается как делитель напряжения источника питания Е. На приемной стороне используется высокоомиый вольтметр. Ес- ли внутреннее сопротивление вольтметра /?в значительно превышает сопротивление R потенциометра, иначе, если нагрузка подключаемая к потенциометру, невелика (Рв>Р), то связь между углом поворота оси потенциометра (нодвижного контакта) и углом отклонения стрелки вольтметра при равномерной намотке потенциометра будет линейной. Выражается эта связь следующим соотношением: AR Е aTai- (23 17) Можно выбрать величину напряжения Е, так чтобы выполнялось соотношение Е AR -- = 1, (23-13) тогда угол отклонения стрелки вольтметра а2 будет равен углу поворота оси потенциометра сц. В этом случае шкала вольтметра может быть отградуирована в угловых единицах. Недостатком описанных дистанционных потенциометрических передач является то, что всякое изменение в первом случае тока / в цепи потенциометра и параметров линии, а во втором случае, напряжения источника питания будет вызывать ошибку Aa=ai-a2. Кроме того, рассмотренный тип передач ограничивает величину передаваемого угла а2макс<С360о. Другой тип дистанционной передачи, обеспечивающей передачу неограниченного вращения, находит более широкое применение Одна из схем такой передачи небаланс- ного типа приведена на рис. 23-34, а. Основной частью передающей стороны этой дистанционной передачи является круговой потенциометр с тремя подвижными контактами, сдвинутыми относительно друг друга на 120°. Напряжение питания потенциометра подводится к двум точкам а и б круговой обмотки, расположенным на ее диаметрально противоположных сторонах. Напряжения со щеток на выход потенциометра подаются с помощью трех контактных колец и скользящих по ним трех неподвижных щеток. На приемной стороне используется трехкатушечный лагометр. Его катушки, находящиеся в поле постоянного магнита, повернуты относительно друг друга на 120° и соединены по схеме звезда . Вторые концы катушек соединены с контактными кольцами. Через эти кольца и скользящие по ним неподвижные щетки к катушкам лаго-метра подводятся с передающей стороны посредством линии связи выходные напряжения потенциометра. Работает такая дистанпионная передача следующим образом. Ось, угол поворота которой необходимо передать на некоторое расстояние, механически связывается с контактными кольцами и щетками потенцио метра. В про&ессе поворота оси щетки смещаются по обмотке относительно точек а, б. При этом происходит перераспределение напряжений по величине и полярности между каждой парой щеток, что вызывает соответствующее изменение токов в катушках лагометра. На рис. 23-34, б приведен график изменения токов в каждой из катушек лагометра в зависимости от поворота щеток потенциометра (угол а{). Из приведенного графика следует, что изменение токов в катушках лагометра с некоторыми искажениями происходит аналогично тому, как это имеет место в трехфазных обмотках моторов переменного тока (показано тонкими линиями). При этом в моторе образуется вращающееся магнитное поле, которое и обеспечивает вращение якоря. Очевидно, при повороте щеток кругового потенциометра магнитное поле, создаваемое катушками лагометра, будет также поворачиваться и, взаимодействуя с полем постоянного магнита, будет поворачивать катушки лагометра на такой же угол, на который повернулись щетки потенциометра. Искажение формы тока в катушках по сравнению с синусоидальной вызывает методическую погрешность дистанционной передачи. Эта ошибка- с учетом трения и несовершенства конструкции элементов дистанционной передачи может достигать 1,5- 2°. Для уменьшения методической погрешности дистанционной передачи круговые потенциометры делают с неравномерной намоткой так, чтобы токи в катушках лагометра изменялись по синусоидальному за кону. Самобалансирующиеся дистанционные передачи часто называют мостовыми передачами, так как воспринимающий элемент передачи (гальванометр или вольтметр) включается в таких системах в диагональ моста, образованного потенциометрами дат- чика RR (рис. 23-35, а) и приемника Rn- -sj-  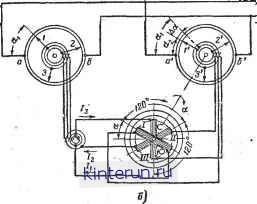 Рис. 23-35. Схемы самобалансирующнхся дистан ционных передач на постоянном токе. а - с ограниченным углом поворота; б - с неограниченным углом поворота. При этом стрелка индикаторного прибора выполняет роль контакта, скользящего по обмотке потенциометра воспринимающего устройства. При разбалансе моста, что будет иметь место, когда щетки потенциометров датчика и указателя будут занимать неодинаковые положения, через индикаторный прибор (гальванометр) будет протекать ток. Вращающий момент, создаваемый рамкой гальванометра, в этом случае переместит щетку 2 в сторону уменьшения рассогласования с положением щетки 1 настолько, что положения щеток 1 и 2 будут одинаковыми. При этом токи через гальванометр, а следовательно, и вращающий момент становятся равными нулю. Всякий раз с поворотом оси датчика и перемещением его щетки будет перемещаться щетка воспринимающего устройства. Если размеры потенциометров одинаковы и их обмотки намотаны идентично, то смеще- ния обеих щеток передачи будут одинаковыми. В пределах небольших углов рассогласования (Да), связь между величинами тока через гальванометр и углом рассогласования определяется следующим выражением: Ivv = Кп.пАа, (23-19) где Лп.д - коэффициент, определяющий чувствительность дистанционной передачи к углу рассогласования. Этот коэффициент определяется через параметры передачи из следующего соотношения- 2а0Рпр + оф-( г)2] (23-20) Знак минус в/правой части берется потому, что углы смещения щеток в потенциометрах датчика и воспринимающего устройства отсчитываются в разных направлениях. Из анализа приведенного выражения следует, что чувствительность передачи изменяется с изменением угла поворота щеток di. Она оказывается минимальной в нулевом положении (di=0): и наибольшей Д*п.д.мако --~-~- в край- 2ос0/?Пр них положениях ai=a0- Недостатком рассмотренной простейшей самобалансирующейся дистанционной передачи является ограниченность передаваемых ею углов поворота (а2<360°). На рис. 23-35, б приведена схема самобалансирующейся дистанционной передачи, обеспечивающая- передачу неограниченного угла вращения. В систему передачи входят два одинаковых круговых потенциометра, имеющих по три токосъемных щетки, расположенных под углом 120° друг к другу. Оба потенциометра питаются от общего источника постоянного напряжения. Питание к каждому из потенциометров подводится к двум точкам а, б и а, б, расположенным на диаметрально противоположных сторонах обмоток. На приемной стороне в качестве воспринимающего устройства используется трехкатушечный лагометр. Каждая из катушек лагометра включена в электрическую цепь между одной из пар щеток 1-1, 2-2 и 3-3 обоих потенциометров Катушки лагометра механически скреплены между собой и со щетками потенциометра воспринимающей стороны и образуют подвижную систему лагометра. Когда щетки обоих потенциометров расположены одинаково Oi=a2, то угол рассогласования между положением щеток датчика и подвижной системы лагометра равен нулю (Aa = ai-ct2=0). При этом разность потенциалов между щетками 1-2-2 и 3-3 также равна нулю и ток во всех катушках лагометра отсутствует. При появлении рассогласования (Да), вызываемого поворотом оси датчика, через катушки лагометра потекут соответствующие возникшему рассогласованию токи. Появится вращающий момент, который повернет подвижную систему лагометра и устранит рассогласование Следовательно, щетки лагометра будут всегда поворачиваться синфазно со щетками задающего потенциометра. Самобалансирующиеся дистанционные передачи работают в режиме нулевых токов в рамках воспринимающих приборов (гальванометры и лагометры), поэтому размеры токонесущих деталей и элементов передачи могут выполняться малогабаритными. Передачи этого типа обладают в сравнении с передачами небалансного типа более высокой точностью и чувствительностью. Они успешно применяются в маломощных следящих системах. Дистанционные передачи перемеииого тока Наиболее широкое применение в технике находят два вида дистанционных передач переменного тока: сельсинная и магне-синная. Часто сельсинную передачу называют условно сельсинным датчиком, понимая под этим устройство, служащее для переда- чи на расстояние углов поворота задающей оси с применением электрического канала связи Сельсинная передача состоит из двух электрически связанных между собой сельсинов: сельсина-датчика и сельсин а-приемника (рис. 23-36, а). По своей конструкции сельсин представляет собой электрическую машину переменного тока. Ее ротор имеет одну обмотку и выполняется с явно выраженными полюсами, а статор образует маг-иитопровод с неявно выраженными полюсами, на котором расположены под углом 120° друг к другу три обмотки, 1, 2, 3, соединенные звездой. (Применяется и другая конструкция сельсинов, у которых одна обмотка укладывается на статоре с явно выраженными полюсами, а три - на роторе с неявно выраженными полюсами.) Другими своими концами катушки статоров (рис. 23-36, а) сельсина-датчика и сельсина-приемника соединяются трехпроводной линией. Роторы сельсинов соединяются с валами, разность углов поворота которых необходимо измерить. Так, например, ротор сельсина-датчика соединяется с входной осью следящей системы регулирования, а вал сельсина приемника закрепляется жестко или же соединяется с выходной осью следящей системы. Питание переменным током подводится к роторной обмотке сельсина-датчика посредством пары колец и щеток Сельсинная передача может работать в двух режимах: трансформатор лом и индикаторном. При работе в трансформаторном режиме входной величиной является разность углов поворота обоих роторов. Выход-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


