
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ного материала. На верхнем конце установлен центробежный регулятор Р. При наборе нужной цифры, соответствующей числу импульсов в посылке, диск поворачивается по часовой стрелке так, чтобы отверстие, обозначенное этой цифрой, 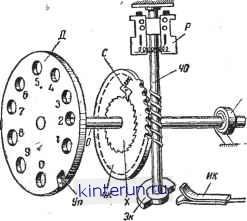 ходнои цепи воспринимающего, устройства в зависимости от этого числа. Дешифраторы числа импульсов характеризуются прежде всего разрешающей способностью, под которой понимается максимальная разрешаемая частота следования импульсов в поступившей посылке. Наибольшее применение из электромеханических дешифраторов числа импульсов нашли дешифраторы с шаговыми распределителями. Основными звеньями таких дешифраторов, помимо распределителя, являются элементы контроля прохождения посылок и элементы возврата в исходное состояние. П Элементы контроля прохождения посылки в дешифраторе числа импульсов нужны для. того, чтобы источник питания подключался к выходной (требуемой) цепи только после окончания посылки и не подключался к другим выходным цепям при движении щетки распределителя. Об окончании посылки свидетельствует длительность наступившей паузы. К цепи А Рис. 23-30. Упрощенная кинематическая схема номеронабирателя. стало перед упором УП. Далее диск отпускается. Во время вращения диска по часовой стрелке пружина П заводилась. Собачка же, укрепленная на червячном колесе, скользила по зубьям храповика. После отпускания диска пружина, раскручиваясь, будет вращать ось О номеронабирателя против часовой стрелки. Так как при этом собачка упирается в зубья храповика, то вместе с ним будет вращаться червячное колесо и связанная с последним червячная ось. В отличие от обычных червячных пар, в которых движение может передаваться только от червячной оси к червячному колесу, в этой паре возможна и обратная передача движения за счет выбора большого шага передачи. Центробежный регулятор, укрепленный на верхней части червячной оси, обеспечивает постоянство скорости вращения. С помощью эксцентрика, укрепленного на нижней части червячного вала, производится периодическое размыкание (или замыкание) импульсных контактов ПК. Передаточное число червячной пары выбрано таким, чтобы при обратном вращении оси номеронабирателя число размыканий соответствовало номеру отверстия в наборном диске, поставленного при наборе перед упором. Дешифраторы числа импульсов с контактными распределителями. С помощью дешифратора числа импульсов осуществляется дешифрирование сигнальных посылок по числу импульсов в них и подключение соответствующей вы-17-1248 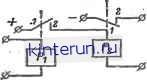 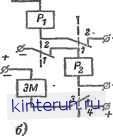 Рис. 23-31. Схемы основных элементов дешифратора числа импульсов с контактным распределителем. а - элементы контроля прохождения импульсной посылки; б - элементы возврата щетки распределителя в исходное положение. Элементы возврата в исходное положение служат для возврата щетки распределителя в исходное положение после воздействия дешифратора на выбранную выходную цепь. Устройство возврата может работать автоматически или при подаче специального сигнала. На рис. 23-31, с приведена одна из схем элементов контроля прохождения по- сылки, основанная на использовании электромагнитных реле. В этой схеме реле Pt воспринимает поступающие сигналы импульсных посылок. Реле Р2 обладает замедленным отпусканием. Параметры реле Р\ и Рг выбираются из условий Гср2 < ts;iMU toTaZ > Граз1, где гСр2 и Готпг-время соответственно срабатывания и отпускания реле Р2, Гзаки и Граз)-длительность замыкания и размыкания контактов 1, 2 реле Pi при поступлении импульсов сигнала. Если указанное условие выполняется, то с подачей первого импульса посылки реле Р2 сработает, его контакты /, 2 разомкнутся и отключат питание от цепи А. Когда же передача посылки окончится и наступит продолжительная пауза, реле Р2 о\пустит, его контакты /, 2 замкнутся и подключат питание к цепи А (выходной цепи, выбранной распределителем). Чтобы обеспечить нормальную работу элементов контроля прохождения посылки, необходимо согласовать временные параметры реле Pi и декодируемой импульсной посылки. Это согласование сводится к необходимости выполнения условий Гхр I < И £отн 1 <С Гн, где /и и tn - длительности импульсов сигнала посылки и пауз между ними. На рис 23-31,6 приведена схема, обеспечивающая автоматический возврат щетки распределителя в исходное положение. В этой схеме реле Pt и Р2 образуют двухрелейный генератор им°лульсов, реле В определяет продолжительность включения исполнительной цепи, реле Pi - входное реле, а ЭМ- электромагнит. Для правильного функционирования схемы возврата паоа-метрьг реле выбираются из условий 1 -срВ ?зам5, /отпв ~ С ГраэЗ. При поступлении иа реле Pi первого импульса посылки реле В сработает и останется в таком положении до окончания посылки. В рабочем положении реле В его контакты /, 2 разомкнутся и напряжение питания к реле Pi и Р2 генератора импульсов не подается. С наступлением длительной паузы- после окончания посылки реле В отпустит, замкнув свои контакты /, 2. С этого момента начнет работать релейный генератор импульсов, питающий электромагнит перемещения щеток распределителя. Когда щетки возвратятся на нулевую ламель, генератор импульсов прекратит работу вследствие того, что цепь питания реле Pi будет разорвана контактным полем распределителя. Время отпускания реле В должно согласовываться со временем отпускания реле Р2 схемы контроля (рис. 23-31, а) прохождения посылки. На рис. 23-32 представлен один из вариантов схем дешифратора числа импуль- сов с электромагнитным шаговым распределителем. В схеме прим.енен двухразрядный электромагнитный распределитель. Устройства контроля прохождения посылки и возврата распределителя в исходное положение собраны по схемам, описанным выше. Работа распределителя поясняется на примере дешифрирования четырехимпульс-ной посылки. 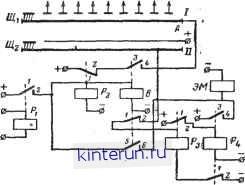 Рис. 23-32. Схема дешифратора числа импульсов С шаговым электромагнитным распределителем. При поступлении первого импульса посылки сработает входное реле Pi. Своими контактами /, 2 оно замкнет цепь питания реле Р2 и В. Размыканием контактов /, 2 реле Р2 при его срабатывании разрывается цепь питания выходных цепей /-XI. При размыкании контактов /, 2 реле В разрывается цепь питания релейного генератора (реле Ps), вырабатывающего импульсы движения. Замыканием контактов 3, 4 реле В подготовляется цепь питания выходных цепей. Контакты 5, 6 реле В при его срабатывании также замыкаются. Так как в это время контакты /, 2 реле Pi еще замкнуты, то образуется цепь питания электромагнита ЭМ и он срабатывает. В момент паузы после первого импульса входное реле Pi отпускает, его контак- ты /, 2 размыкаются, разрывая цепи питания реле Р2, В и электромагнита ЭМ. Вследствие того, что выполняются условия /отп2>*раз1 И ГотпВ>Гразь ЯКОри реле Р2 и В остаются в течение паузы притянутыми. Электромагнит же отпускает и продвигает щетки распределителя на первую ламель. При поступления второго импульса посылки выходное реле Pi снова срабатывает и с замыканием своих контактов /, 2 восстанавливает цепи питания реле Р2, В и электромагнита ЭМ. Вследствие этого реле Р2 и В остаются в рабочем положении, электромагнит ЭМ срабатывает. С наступлением паузы после окончания второго импульса посылки схема работает так же, как и в первую паузу. При подаче третьего и четвертого импульсов посылки дешифратор работает аналогично. После того как окончился последний (четвертый) импульс посылки, схема работает как в обычной паузе, т. е. отпускает реле Pi и своими контактами /, 2 разрывает цепь питания реле Р2, В и электромагнита ЭМ. Щетки распределителя при этом устанавливаются на четвертую ламель. С продолжением паузы после окончания посылки прежде отпускает реле Р2, а через некоторое время реле В, так как еотпВ> Контакты /, 2 реле Р2 при его отпускании замыкаются и подключают питание к четвертой выходной ламели распределителя (номер выходной ламели определяется числом импульсов в принятой посылке). Спустя некоторое время отпускает реле В и контакты 3, 4 отключают питание выходных цепей, а контакты 5, 6 отключают реле Pi от электромагнита. При отпускании реле В контакты /, 2 замыкаются и подключают питание к реле генератора импульсов. Последний начинает генерировать импульсы движения, поступающие к электромагниту ЭМ, который при этом периодически срабатывает, перемещая щетки, распределителя на нулевую ламель. Когда щетка Щ2 станет в исходное положение, цепь питания реле Pi разрывается и релейный генератор прекращает работать. Дешифратор возвратился в исходное состояние. 23-4. ЭЛЕМЕНТЫ СИНХРОННОЙ СВЯЗИ Одной из важнейших задач, которые выполняют элементы автоматических и телемеханических устройств, является передача на расстояние изменений параметров различных физических процессов. Частным случаем дистанционной передачи, широко используемой в технике, является так называемая синхронная связь, обеспечивающая поворот оси некоторого устройства на приемной стороне синхронно и синфазно с поворотом оси задающего устройства иа передающей стороне Используются дистан-.ционные передачи постоянного и переменного тока. Дистанционные передачи постоянного тока Широкое распространение получили по-генциометрические дистанционные передачи постоянного тока, в которых входной сигнал задается изменением положения щеток потенциометрического датчика, а на выходе воспринимается подвижной системой магнитоэлектрического устройства. В качестве датчиков при этом применяются обычные потенциометры, а в качестве приемников используются магнитоэлектрические гальванометры и лагометры. Важнейшими характеристиками всякой дистанционной передачи являются величина синхронизирующего момента МСИн и угловой погрешности 17* (угла рассогласования) Дао, появляющейся при передаче угловых перемещений. Синхронизирующим моментом называется вращающийся момент, прикладываемый к валу воспринимающего элемента ди станционной передачи. Этот момент появляется при наличии рассогласования между положением датчика аг и приемника а2 дистанционной передачи. Знак момента должен быть таким, .чтобы устранялось имеющееся рассогласование между углами поворота осей датчика и приемника. 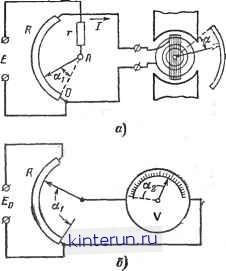 Рис. 23-33. Схемы потенциометрнческнх дистанционных передач небалаисного типа на постоянном токе. а - с гальванометром на выходе; б - с вольтметром иа выходе. Минимальный синхронизирующий момент, уравновешивающий моменты трения и момент нагрузки, определяет величину угловой погрешности дистанционной передачи. Этот угол называется углом рассогласования Да0 дистанционной передачи или точностью ее следования. Все известные дистанционные передачи потенциометрического типа разделяются на две основные группы: небалансного типа и самобалансирующиеся дистанционные передачи. В дистанционных передачах небалансного типа угол поворота подвижной системы магнитоэлектрического устройства на приемной стороне, определяется величиной тока в его обмотках. На рис. 23-33, а приведена схема простейшей потенциометрической дистанционной передачи. Она состоит из источника питания Е, потенциометра R и гальванометра. Ось потенциометра механически соединяется с осью, угол поворота которой нужно передать на приемную сторону. Гальванометр служит приемником передаваемого
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


