
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств комплексная величина). Для несущих на входе и выходе вх - f вых- Дифференцируя это равенство, получаем: И?(р) = р. - aKaUB K-UB l*F(P) Таким образом, для коэффициентов модуляции справедлива простая структурная схема линейной системы АРУ. С ее помощью можно определить зависимость модуля l-i/в Учитывая, что dK dK dup dUBba duv dUE ВЫХ ВЫХ находим: для преобразований Лапласа малых приращений: О AlW (Р) = Двх (Р)- 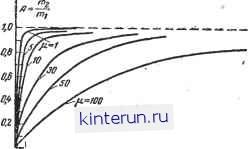 l + aUB К = AUBX (р)- БХ т \+<dJBXKaF{p) (В последнем выражении UBX полагалась величиной постоянной.) Разделив левую и правую часть равенства на L/вых и учтя, что , ч At/Bx(P) твх(р)=~ТЕ- - I I I I 1 I \ \ л \ ) t V>r\ го to во ев wo w т т /во гоо Рис. 22-137. Зависимость отношения модулей коэффициентов модуляции от произведения ь>т для системы АРУ с однозвенным фильтром при различных н огибающей на выходе и фазы огибающей от параметров системы для любого типа фильтра. В случае простого однозвенного ЙС-фильтра. (Р) = получим: :(Р) = Двых (Р) V RKIX тЕХ (р) получаем: Ф(Р) = l+aKaUmF(p) Последнему выражению отвечает структурная схема на рис. 22-136, где тВх и твыж- коэффициенты модуляции.
Рис. 22-136. Структурная схема системы v АРУ для коэффициентов модуляции. В этом легко убедиться, составляя выражения для передаточной функции замкнутой системы: W(p) Ф(Р) = - Тр + 1 Тр+\ г Тр+1 = Аз 1 + р. + Тр ТэР + 1 Кэ = 1 +д. 1+(Х Отсюда следует, что для коэффициентов модуляции замкнутая следящая система эквивалентна форсирующему динамическому звену (см. стр. 30) с параметрами R, С и Rl\x. Это определяет свойства такой системы, в частности зависимость отношения модулей и разности фаз коэффициентов модуляпии от частоты со (или относительной частоты соТ): вых 1 + (соГ)а ср = arctg (1+р.)з + (соГ)* р.соТ 1 + ц + (cor)2 I + W (р) Соответствующие графики этих зависимостей (рис. 22-137 и 22-138) показывают следующее. Чем больше значение \i (т. е. чем выше уровень несущей), тем интенсивнее подавление модуляции. Причина этого состоит в том, что с увеличением р, возрастает быстродействие, системы АРУ и, следовательно, увеличивается степень регулирующего дей- 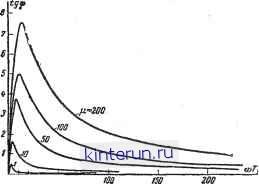 о ю го so Рис. 22-138. Зависимость тангенса дополнительного фазового сдвига в системе с АРУ с однозвенным фильтром от соТ при различных значениях II. ствия. Для того чтобы фазовые сдвиги огибающей, обусловленные действием системы АРУ, были малыми, необходимо выбирать достаточно большие значения постоянной времени, величина которых тем выше, чем больше амплитуда несущей (величина ц). В случае фиксированной частоты огибающей можно для исключения влияния АРУ на огибающую ввести в цепь АРУ режек-торный фильтр, запрещающий доступ регулирующего напряжения на частоте огибающей и, следовательно, предотвращающей уменьшение коэффициента модуляции и появление дополнительных фазовых сдвигов. Более детально вопросы работы системы АРУ рассмотрены в [Л. 20, 12]. ЛИТЕРАТУРА 1. Капланов М. Р., Левин В. А., Автоматическая подстройка частоты, Гос-энергоиздат, 1962. 2. Капранов М. В., Полоса захвата при фазовой автоподстройке частоты, Ра-диотехника * № 12, 1956. 3. Тузов Г. И., Выделение и обработка информации в допплеровских системах, Советское радио , 1967. 4. Л е в и н Б. Р., Теоретические осно- вы статистической радиотехники, книга первая, Советское радио , 1956. 5. Тихонов В. И., Статистическая радиотехника, Советское радио , 1966. 6. Шахгильдян В. В., Ляхов-к и н А. А., Фазовая автоподстройка частоты, Связь , 1966. ч7. Кантор Л. Я-, Методы повышения помехозащищенности ЧМ сигналов, Связь , 1967. 8 Сколник М., Введение в технику радиолокационных систем, Мир , 1965. 9. С а м с о н е н к о С. В., Цифровые методы оптимальной обработки, радиолокационных сигналов, Воениздат, 1968. 10. Б ар тон Д., Радиолокационные системы, Воениздат, 1967. 11. Бортовые радиолокационные системы, Воениздат, 1964. 12. Кривицкий Б. X., Автоматические системы радиотехнических устройств, Госэнергоиздат, 1962 13. Пер о в В. П., Расчет радиолокационных следящих систем с учетом случайных воздействий, Судпромгиз, 1961. 14. Джеймс X., Никольс Н., Ф и л л и п с Р., Теория следящих систем, Изд-во иностранной литературы, 1953. 15. Дулевич В. Е. и др., Теоретические основы радиолокации, Советское радио , 1964. 16. Бендат Дж., Основы теории случайных шумов и ее применение, Наука , 1965. 17. Б о б н е в М. П., Кривицкий Б. X., Ярлыков М. С, Комплексные системы радиоавтоматики, Советское радио , 1968. 18. Цивлин И. П., Электронный дальномер с двумя интеграторами, Советское радио , 1964. 19. Крылов Г. М., Смирнов Г. А., Транзисторные усилители с автоматической регулировкой усиления, Энергия , 1967. 20. Тартаковский Г. П., Динамика систем автоматической регулировки усиления, Госэнергоиздат, 1957. 21. Б а к у т П. А. и др., Вопросы статистической теории радиолокации под редакцией Г. П. Тартаковского, т. I, II, Советское радио , 1964. 22. Бычков С. И., Буренин Н. И., С а ф о р о в Р. Т., Стабилизация частоты генераторов СВЧ, Советское радио , 1962. 23. Щ у ц к о й К- А., Транзисторные усилители высокой частоты, Энергия , 1967. 24. Красовский А. А., Поспелов Г. С, Основы автоматики и технической кибернетики, Госэнергоиздат, 1962. РАЗДЕЛ 23 ЭЛЕКТРОМЕХАНШЕСКМЕ ЭЛЕМЕНТЫ АВТОМАТИКИ СОДЕРЖАНИЕ 23-1. Электромеханические реле .... 238 Общие сведения (238). Электромагнитные реле постоянного тока (242). Электромагнитные реле переменного тока (242). Поляризованное реле (243). Магнитоэлектрические реле (244). Резонансные реле (244) 23-2. Устройства автоматики с электромеханическими реле ...........245 Электронно-контактные реле (245). Реле времени (246). Вибрационные преобразователи (247). Релейные генераторы (248). Релейные устройства логических элементов ИЛИ, И и НЕ (250) 23-3. Распределители . ........ 251 Электромеханические распределители (251). Шифраторы н дешифраторы полярности сигналов (254). Шифраторы и дешифраторы числа импульсов с контактными распределителями (255) 23-4. Элементы синхронной связи.....259 Дистанционные передачи постоянного то- ка (259). Дистанционные передачи переменного тока (262) 23-5. Функциональные устройства.....265 Функциональные потенциометры (265). Устройства для воспроизведения тригонометрических функций (267). Вращающийся трансформатор (268) 23-6. Устройства для выполнения математических операций...........269 Сложение скалярных неличин (269). Ум иожение и деление (271). Дифференцирующие устройства (273). Интегрирующие устройства (274) 23-7. Электромашинные усилители .....276 23-8. Исполнительные (отрабатывающие) устройства ..............277 Электрические двигатели исполнительных устройств (277). Серводвигатели постоянного тока с независимым возбуждением (278). Серводвигатели с последовательным возбуждением (279). Серводвигатели переменного тока (279). Серводвигатели с электромагнитными н порошковыми муфтами (280) 23-1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ РЕЛЕ Общие сведения Одним из наиболее распространенных элементов электроавтоматики являются электромеханические реле, представляющие собой устройства, которые осуществляют быстрое изменение параметров электрической цепи (включенной на выходе реле, рис. 23-1, а) при подаче на вход реле электрического сигнала определенного значения. Изменение параметров управляемой цепи производится путем замыкания или размыкания контактов реле. На рис. 23-1,6 приведена статическая характеристика реле. При непрерывном изменении тока в управляющей цепи в пределах от /=0 до /=/оР контакты реле не срабатывают. При достижении управляющим сигналом значения /=/ср происходит замыкание контактов реле и параметр у управляемой цепи изменяется скачкообразно от у=уШкъ до г/ = г/макс Дальнейшее увеличение управляющего сигнала от /~/Ср до /=/Ыакс не вызывает из- менений параметра у. Уменьшение сигнала / от /макс да /ср, а во многих случаях и до готп</Ср не вызывает отпускания реле (размыкания контактов). Когда управляющий сигнал достигнет значения /=/Стп, контакты реле разомкнутся и параметр у управляемой цепи примет значение у=укпв. Значения сигнала /Ср и /отп называются соответственно сигналами срабатывания и отпускания. Отношение Дв-/отп Ср называется коэффициентом возврата. Для большинства электрических реле Кв<1. Электромеханические реле обычно имеют три составные части: воспринимающую, исполнительную и промежуточную. Воспринимающая часть (электромагнит или иное электрическое устройство), при помощи которой реле реагирует на изменение величины управляющего сигнала. Исполнительная часть (обычно контактные группы) осуществляет скачкообразное изменение параметров управляемой электрической цепи. Промежуточная часть выполняется в виде различного рода рычажных и других механизмов, которые обеспечивают передачу
|
||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


