
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Автоматическая регулировка усиления может осуществляться путем изменения сопротивления специально вводимых в схему усилителей нелинейных элементов. Режим работы транзистора по постоянному току в этом случае не изменяется, и, следовательно, исчезают противоречия между требованием температурной стаби- 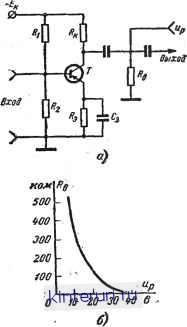 Рис. 22-130. Регулировка коэффициента усиления с помощью нелинейного управляемого сопротивления (варнстора) R&. а - схема; б- характер зависимости сопротивления варистора от регулирующего напряжения и . лизации и стремлением увеличить степень регулировки; не меняется также уровень нелинейных искажений. В качестве регулируемых нелинейных элементов - используются полупроводниковые диоды, переходы эмиттер - база транзисторов, управляемые нелинейные резисторы. На рис. 22-130,а изображена схема с нелинейным управляемым сопротивлением (варистором) RB, включенном параллельно нагрузке усилителя с транзистора Т. Сопротивление варистора RB изменяется с помощью постоянного напряжения ир, поступающего с усилителя АРУ. (Примерный вид зависимости RB(up) представлен на рис. 22-130,6.) Недостаток таких схем состоит в том, что в процессе регулировки изменяется полоса пропускания каскада. Нелинейное сопротивление может использоваться также в схеме делителя напряжений на входе регулируемого каскада, причем в качестве такого сопротивления можно использовать также диод или транзистор. В схеме с диодом (рис. 22-131, с) регулирующее напряжение ир весьма мало, поскольку диапазон напряжений, в котором внутреннее сопротивление диода существенно меняется, не превосходит нескольких десятых долей вольта. В зависимости от величины напряжения регулирования ир меняется доля напряжения, поступающего на 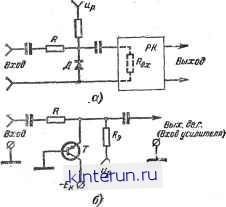 Рис. 22-131. Схемы регулировки коэффициента усиления с помощью нелинейных делителей на входе регулируемого каскада РК. а - схема с диодом (R Ех- входное сопротивление усилителя); б-схема с транзистором Т (Вых. дел. - выход делителя и вход регулируемого усилителя). вход регулируемого усилительного каскада, поскольку меняется сопротивление диода, который является плечом делителя входного сигнала. Диод в схеме должен обладать резкой зависимостью дифференциального сопротивления от ир (например, кремниевый диод Д204). Аналогичным образом действует нелинейный делитель с транзистором Т. При изменении режима (под действием напряжения Up) меняется сопротивление плеча делителя напряжения на входе регулируемого усилителя (рис. 22-131,6). Сопротивление транзистора может меняться в достаточно широких пределах (от нескольких десятков ом до нескольких килоом) при сравнительно небольшой мощности, потребляемой от усилителя АРУ. Регулировка усиления каскада может осуществляться также путем изменения глубины отрицательной обратной связи, охватывающей регулируемый усилительный каскад (рис. 22-132). Сопротивление Rs отрицательной обратной связи в цепи эмиттера шунтируется нелинейным сопротивлением диода Д. Последнее регулируется напряжением ир. Если напряжение регули-лирования Up подается в прямом направлении, сопротивление диода с ростом иР падает, а следовательно, уменьшается глубина обратной связи через резистор Кэ и шунтирующего сопротивления RR; соот- ветственно коэффициент усиления возрастает. При противоположной полярности (т. е. когда с ростом р ток диода убывает) увеличение ир вызывает уменьшение коэффициента усиления регулируемого каскада. С увеличением тока, проходящего через диод, шунтирующее сопротивление диода убывает, следовательно, уменьшается глубина обратной связи и коэффициент передачи каскада увеличивается. Изменение -у--=-0-f* U to,o и-[]- BxoS Ь7н\ toja 1-Oh - Выход Рис. 22-132. Схема, поясняющая принцип вариации глубины отрицательной обратной связи для регулировки усиления каскада в соответствии с глубины обратной связи часто оказывается .наиболее гибким и удобным способом регулировки усиления многокаскадных усилителей. Более подробные сведения о способах осуществления регулировки транзисторных усилителей, а также некоторые расчетные соотношения содержатся в [Л. 19]. Динамические режимы систем АРУ Своеобразная особенность систем АРУ, обусловленная изменением коэффициента передачи, состоит в том, что быстродействие системы АРУ зависит не только от параметров системы, но и от амплитуды входного сигнала вх: чем выше амплитуда, тем при прочих равных условиях больше быстродействие и тем меньше время регулирования. Это свойство удобно выяснить на примере системы с однозвенным фильтром Ф, имеющим передаточную функцию. Будем считать регулировочную характеристику линейной (см. рис. 22-124,6), т. е. /((Up) = /Со - a Up (коэффициент а характеризует наклон прямой- а=arctg ср), а также примем ради простоты напряжение задержки равным нулю: £з=0. Тогда, учитывая, что напряжение на входе фильтра равно вых/Са ( вых - амплитуда напряжения на выходе усилителя, а /Са=Дус/Сд) получаем: *~jf + UP - Яа вых- - Инерционность регулируемого усилителя, как правило, достаточно мала и можно считать, что иВых=/С вх= (/Со-сшр) Вх. Тогда dur. Т - + ир = Ка вх (Ко - а р) Т + Up (1 + д.) = КоКа вх- (22-65) Здесь U. = 05 /Са вх. Полученное уравнение полностью описывает динамические свойства системы АРУ. Оно является линейным с переменным коэффициентом (и.). При постоянном вх, т. е. когда входной сигнал представляет собой ступенчатое воздействие Вх= = UBxl(t), уравнение можно записать в виде передаточной функции инерционного звена Ф(Р) р(Р) (22-66) Важно подчеркнуть, что постоянная времени Та зависит от интенсивности входного сигнала. С увеличением UBX постоянная времени убывает, т. е. быстродействие системы АРУ увеличивается. Напряжение регулирования в соответствии с передаточной функцией (22-66) меняется по экспоненте /Со каивх Г ~т~~\ а выходное напряжение : = Ко СШт, = 1 + р. 1 +це (22-67) (22-68) Соответствующие переходные процессы up(t) и вых (0 представлены на рис. 22-133. При рассмотрении систем АРУ иногда вводят дюнятие динамического коэффициента передачи регулируемого усилителя: К ,rt вьГх (О к 1 + № 7 Адин (*) = = До 1+1 который уменьшается от максимального значения /Со в начальный момент до установившегося Куст - -Г-~ (прИГ=оо), 1+ dl\aUBX тем меньшего, чем больше 1/вх.  Рис. 22-133. Переходные процессы в системе АРУ с однозвенным фильтром при ступенчатом сигнале UBX на входе. й - кривая р(0: б - кривая ВЫХ(Ь Зависимость постоянной времени от напряжения входа £/вх (рис. 22-134) не свойственна ни одной из рассмотренных ранее систем. Несмотря на то что уравнение (22-65) является линейным, принцип суперпозиции по отношению к амплитуде входного сигнала uBZ не соблюдается, т. е. решение, найденное для сигнала вх+вх не равно сумме решений, найденных порознь для ивх и ивх. Следовательно, система по отношению к ивх действует как нелинейная. Из уравнения (22-68) при t ~* со легко получить выражение для статической характеристики системы АРУ при идеализированной (линейной) регулировочной характери- стике: к0ив 1+аКаив При рассмотрении реакции системы АРУ на ступенчатое воздействие не учитывалась возможность перегрузки последних каскадов УПЧ. На время перегрузки регулирующее действие системы АРУ прекращается, а длительность процесса установления возрастает. Установленное свойство увеличения быстродействия с ростом интенсивности входного сигнала наглядно проявляется при рассмотрении воздействия нарастающего сигнала на систему АРУ. Если сигнал на входе увеличивается по закону mtn (т и п постоянны), то сигнал на выходе вначале увеличивается, а затем вследствие опережающего роста быстродействия системы 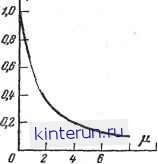 в Ю Рис. 22-134. Зависимость относительной эквивалентной постоянной времени системы &7) от относительного уровня входного сигнала и,-а авх- 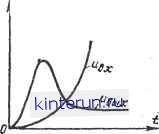 Рис. 22-135. Реакция системы АРУ ивых(г) на нарастающий входной сигнал ивх(0- (Масштабы по оси ординат не соблюдены.) АРУ стабилизируется на определенном уровне (рис. 22-135) [Л. 12]. Важное значение для работы некоторых систем радиоавтоматики (в частности, системы с коническим сканированием) имеет явление дополнительного фазового набега огибающей синусоидальных колебаний при прохождении усилителя с АРУ. Это явление также обусловлено зависимостью быстродействия от уровня входного сигнала. Необходимые количественные соотношения могут быть найдены из анализа прохождения амплитудно-модулированных колебаний через усилитель с АРУ. Предположим, по-прежнему, что регулировочная характеристика линейна (см. рис. 22-124,6), но фильтр системы АРУ произволен [имеет передаточную функцию F(p)]. Будем далее полагать, что на вход усилителя с АРУ поступает сигнал с несущей [/их, модулированный по амплитудес малым коэффициентом модуляции тв% (точка показывает, что рассматривается
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


