
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств В результате возникают дополнительные ошибки, которые при правильном выборе параметров и структуры системы можно свести к минимальному уровню (см. об этом [Л. 17]). Примером осуществления комплексной системы может служить система углового сопровождения целей, установленная на самолете [Л. 17], в которую от гироскопического ИСД вводится сигнал, пропорциональный собственным угловым колебаниям самолета (угол уа). Сигнал гироскопического датчика подается на вход исполнительного двигателя звена W, охваченного обратной связью (рис, 22-121), поскольку 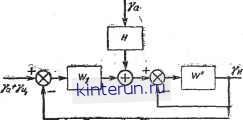 Рис. 22-121. Пример комплексной системы автосопровождения по угловой координате. ввод этого сигнала на выходной вал двигателя не всегда можно выполнить конструктивно. Спектральная плотность случайных ошибок гироскопического измерителя сосредоточена у нулевых частот, в то время как спектр радиопомех достаточно широк. Преобразуя структурную схему рис. 22-121 к стандартному виду (см. рис. 22-116) и учитывая, что W (р) =--дв- Р(ТдвР+1) получаем: Г, = 1+W т2р2-г-2?тр-т-1 Для возможно более точного выполнения условий согласования Я = --=т2р2 + 2£тр+1 и выбора передаточной функции реального согласующего звена Яр, не сильно отличающегося от Я, необходимо, чтобы фильтр с передаточной функцией Wz был достаточно широкополосным, т. е. необходимо величину Кдв сделать достаточно большой и соответственно ТДБ малой. Если последнее выполнить не удается, прибегают к охвату двигателя скоростной обратной связью (см. стр. 38), чем , достигается снижение эквивалентной постоянной времени двигателя. Астатизм системы достигается введением в звено Wi интегрирующего элемента. Отметим, что гироскоп обладает прецессией (медленные уходы гироскопа). Непременным условием правильной работы системы является исключение систематической ошибки установившегося режима, обусловленного прецессией. Поскольку система по отношению к вводимому сигналу является астатической, . это условие выполняется и прецессия гироскопа не приводит к нара--стающим во времени или постоянным ошибкам. 22-6. СИСТЕМЫ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ Принцип действия систем АРУ Системы автоматической регулировки усиления (АРУ) предназначены для стабилизации уровня выходных сигналов радиоприемных устройств, а также для поддержания оптимального режима работы усилителей промежуточной частоты приемников в широком динамическом диапазоне изменения входных сигналов при сохранении амплитудной модуляции входных сигналов. Необходимость стабилизации уровня сигнала объясняется тем, что следующие за радиоприемниками устройства различных радиотехнических аппаратов могут выполнять свои функции лишь при незначительных изменениях величины поступающих сигналов. В то же время сигналы на входе радиоприемников могут изменяться по интенсивности в чрезвычайно широких пределах из-за изменения расстояний между источником сигналов и приемником, а также вследствие того, что один приемник используется для приема радиостанций различной мощности и другие причины. Поэтому системы АРУ являются непременной частью радиоприемного устройства. Сохранение амплитудной модуляции при стабилизации уровня выходного сигнала возможно только в случае, когда модулирующее напряжение меняется значительно быстрее, чем уровень входного сигнала. Это достигается соответствующим выбором параметров фильтров в системе АРУ. Если скорости изменения уровня сигналов и полезного модулирующего сигнала близки, происходит частичная демодуляция сигналов из-за действия системы АРУ и изменение уровня выступает как помеха. В радиоавтоматике системы АРУ выполняют весьма ответственные функции, связанные чаще всего со стабилизацией коэффициента передачи измерительных устройств. Если для радиоприема сигналов неавтоматических систем основное значение имеет установившийся режим работы систе- мы АРУ, то для систем радио автоматики важны динамические характеристики системы АРУ, так как переходные процессы в этой системе могут существенно повлиять на работу других систем радиоавтоматики, на которые поступают сигналы данного приемника. Поэтому в дальнейшем большое внимание уделяется описанию особенностей динамических режимов. По принципу действия различают системы АРУ без обратной связи и с обратной связью. Система АРУ без обратной связи (АРУ вперед )- В этой системе (рис. 22-122) выходные сигналы усилителя промежуточной частоты приемника (УПЧ) детектируются (Дару), усиливаются (Уару) и поступают
и1ых торых системах радиоавтоматики (см., например, стр. 188). Система АРУ с обратной связью (АРУ назад ). В этой системе (рис. 22-123) выходные сигналы УПЧ радиоприемника детектируются (Дару), усиливаются (Уару) и через фильтрующие цепи (Ф) поступают в виде регулирующего напряжения ир на УПЧ. С помощью напряжения ир осуществляется регулировка коэффициента усиления каскадов УПЧ. При изменении амплитуды напряжения иВых на выходе УПЧ изменяется величина р и в соответствии с нею коэффициент усиления каска- 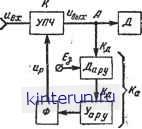 Рис. 22-122. Функциональная схема системы автоматической регулировки усиления приемника без обратной связи (АРУ вперед ), ару, аРУ -Детектор и усилитель системы АРУ, ВК - выходные каскады. Рис. 22-123. Функциональная схема системы автоматической регулировки усиления с обратной связью (АРУ назад ). на последующие усилительные элементы выходных каскадов (ВК). В результате этого коэффициент их усиления изменяется и осуществляется стабилизация уровня выходных сигналов. Иногда усилитель АРУ отсутствует, так что регулирующее напряжение подается непосредственно с детектора АРУ. При увеличении напряжения сигнала иЕЫх на выходе радиоприемника величина сигнала ыр на выходе усилителя АРУ возрастает, что вызывает уменьшение усиления выходных каскадов. В некотором диапазоне изменения амплитуды удается подобрать зависимость усиления выходных каскадов от регулирующего напряжения ыр так, чтобы выходной сигнал оставался неизменным. Недостаток такой системы, как и любой системы без обратной связи, состоит в том, что способ действия системы не зависит от того, каков истинный уровень выходного сигнала. В случае изменения коэффициента усиления выходных каскадов (например, его падения, обусловленного старением лампы или изменением температурных условий работы транзисторов) регулирующее напряжение меняться не будет, а уровень стабилизации выходного напряжения изменится. Кроме того, система АРУ вперед не позволяет поддерживать нормальный режим работы УПЧ в очень широком диапазоне изменения амплитуды входных сигналов и, следовательно, не выполняет одной из основных функций, возлагаемых на систему АРУ. Поэтому она используется как вспомогательная в неко- дов УПЧ так, что динамический диапазон выходных сигналов оказывается значительно меньшим динамического диапазона входных сигналов. Все изменения коэффициента передачи автоматически учитываются системой, поскольку здесь действует обратная связь с выхода на вход. На детектор или усилитель системы АРУ обычно подается запирающее напряжение Е3 - задержка АРУ. Этим исключается действие обратной связи (разрыв цепи АРУ) и прекращается уменьшение коэффициента передачи для сигналов малого уровня. Цепь АРУ замыкается только тогда, когда напряжение на соответствующем элементе превосходит напряжение задержки. Иногда, если требования к изменению уровня выходного сигнала не очень жесткие, в системе может отсутствовать усилитель АРУ и на вход Фильтра напряжение подается с детектора РУ. Действие системы АРУ основано не на сравнении выходного сигнала со входным, а на изменении параметра (коэффициента передачи) системы в соответствии с сигналом обратной связи, т. е. система АРУ является параметрической. Отсюда вытекают и своеобразные свойства системы АРУ, отличающие ее от рассмотренных ранее систем радиоавтоматики, где коэффициент передачи остается неизменным. Вследствие того, что система АРУ является параметрической, ее можно заставить работать в очень широком диапазоне-, изменения сигналов на входе, достигающих 100 дб. В системе АРУ регулировке подвергается УПЧ, коэффициент передачи К которого является функцией напряжения %>. 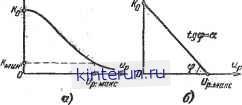 Рис. 22-124. Регулировочная характеристика усилителя. а - реальная; б - идеализированная (для расчета динамических режимов). Зависимость К(ир) называется регулировочной характеристикой системы АРУ (рис. 22-124) и служит основой при рассмотрении процессов в системе. Регулировочная характеристика снимается экспериментально или рассчитывается по заданным регулировочным. характеристикам отдельных каскадов усилителя. Статические характеристики системы АРУ Статической характеристикой называют зависимость амплитуды выходного напряжения вых=сБы1 на выходе УПЧ приемника (или напряжения регулирования ир-UP) от амплитуды входного напряжения вх = С,вх в установившемся режиме. Если в системе используется задержка, то зависимость UBaz.(UBi) имеет два явно выраженных участка крутой ОМ и пологий MN (рис. 22-125). На участке ОМ цепь 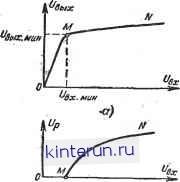 Рис 22-125. Статические характеристики системы АРУ. а - зависимость амплитуды выходного напряжения fBblx0T амплитуды напряжения на входе 6 - зависимость напряжения регулирования Up от UBX. регулирования разомкнута (£/р=0) и выходное напряжение пропорционально входному, причем коэффициент передачи имеет постоянное максимальное значение Kg. Участок MN соответствует режиму регулирования; его наклон характеризует эффективность систему АРУ. В системах без задержки эти два участка выражены менее ярко; тем не менее и здесь эффективность регулирования возрастает с увеличением сигнала на входе. Для количественной оценки эффективности системы АРУ вводится коэффициент /и вых мин, равный отношению максимальной и минимальной амплитуд выходного напряжения при заданном динамическом диапазоне а= £/БХ.маке/£вх.мии изменения амплитуды сигнала на входе. Величина {/вх.мин соответствует достижению номинальной мощности сигнала на выходе и обычно отвечает области перехода одного участка характеристики в другой; £/Вх.макс - амплитуда наибольшего расчетного входного напряжения. Чем эффективнее действие системы АРУ, тем меньше коэффициент р отличается от единицы, тем меньше наклон рабочего участка. Как следует из принципа действия системы наклон этого участка не может быть нулевым, так как £/р может изменяться только за счет изменения £/Вых. К системе АРУ предъявляется требование достижения определенного значения р при заданной величине а, следовательно, отношение сс/Р характеризует степень регулировки. Для увеличения эффективности регулировки в цепь обратной связи включается усилитель АРУ (коэффициент передачи Кус). На рис. 22-123 этот усилитель включен после детектора АРУ, но часто используются схемы, где усилитель предшествует детектору. В дальнейшем рассмотрена схема на рис. 22-123, когда напряжение задержки Е3 подано на детектор АРУ. Не представляет труда провести те же рассуждения для схемы, в которой усилитель предшествует детектору или напряжение Е3 подано на усилитель АРУ. Чем больше коэффициент передачи Ка=КдКуе усилителя и детектора АРУ, тем меньше наклон участка MN. Напряжение регулирования С/р=0, а коэффициент передачи усилителя имеет максимальное значение К=Ко до тех пор, пока напряжение на входе детектора АРУ не превзойдет величины напряжения задержки Е3 (или на входе усилителя АРУ, если Е3 подано на этот усилитель). Сигнал на выходе радиоприемника при этом должен достигнуть своего номинального значения (точка М на рис. 22-125). Амплитуды напряжения на выходе усилителя и на входе детектора АРУ (точка А на рис. 22-123) обозначим соответственно UBX.MBa И {/вых.мин, Причем {Увых.мин = £з = - U вх.минКо. Если заданы величины а и Р и известна регулировочная характеристика, то
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


