
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств вектором Д(г) соответственно углы у и р (рис. 22-109), то Д= цсо8у; Д=а созв. Для наземной радиолокационной станции типичным случаем является пролет объекта (цели) с постоянной скоростью vn на высоте Я (рис. 22-110). Производные наклонной дальности выражаются в этом случае следующими соотношениями [см. Л. 10, стр. 378, Л. 11, стр. 510]: д=/ д20 + ( v)2 /л1 + *1 ? Дмак - -- sin3 а До pcfl 3< : - -- sin4 a cos а Рис 22-109. Взаимное положение системы АСД и цели Я- н т. д. Здесь а - ракурс цели, До - наклонная дальность в момент достижения минимального расстояния (при а=90°). (Состояние, соответствующее а=90*, называют также нахождением цели на параметре .) 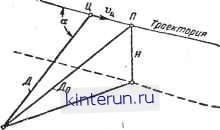 Рнс. 22-110. Диаграмма, иллюстрирующая слежение по дальности при пролете цели Ц относительно системы АСД. В точке П цель находится на параметре . И - высота полета. Дальность до цели меняется по закону Д = Д+Щ + ДР+.-- Время t в этой формуле отсчитывается от момента нахождения цели на параметре в положительном направлении в обе стороны. Соответствующие графики относительных величин скорости и ускорения изобра-. жены на рис. 22-111. Относительная скорость равна нулю иа параметре и растет по мере отклонения угла а от 90°. Ускорение, напротив, максимально на параметре (а=90°) и составляет ±0,85 г)ц /До. Подставляя значение Д и Д, Д и т. д. в формулу (22-58), получаем закон изменения установившейся ошибки определения дальности ЛДуст- 1°, ВО 30 120 150 ISO Цель Ракурс цели ее Цель удаляется приближается Рис. 22-111. Зависимость относительных величии производных при пролете воздушной цели. ное ускорение Д/с, А/ - относительная третья производная Д/иц:(Д(,/иц )2, Д0 - дальность на параметре . Иногда удобно представлять закон изменения Д при пролете цели не во временной, а в частотной области. Если кривые иа рис. 22-111 аппроксимировать отрезками прямых (относительную скорость - ломаной типа характеристика ограничителя , относительное ускорение - прямоугольным импульсом, третью производную - б-импуль-сами), то для таких аппроксимированных кривых изменение дальности в частотной области выразится соотношением [см. Л. 11, стр. 511]: Д* .(; )=- - Д* (о) = Д* (/<в) /Ш / /(0 + (Bj 2ДП и? С02+ (й\ где До - дальность на параметре; 1 % % = - = ---сопрягающая частота; Ч До Д*- аппроксимированная дальность. Если по оси ординат отложить относи-, 1 Д ((в) Д (и) тельную дальность а = - (здесь ♦= До Оц ), а по оси абсцисс - относи- тельную частоту от (в логарифмическом масштабе), то амплитудно-частотную ха- рактеристику [зависимость d(coT)] можно аппроксимировать двумя прямыми (рис, 22-112). Низкочастотная асимптота йнч(сот)= 2/(сот)2 имеет наклон- 2, а высокочастотная dB4 - =2/(сот)3 наклон - 3 и пересекает ось абсцисс при сот= v 2=1,26, причем сами отрезки пересекаются при сот= 1.
0,0/ Рис. 22-112. Асимптотическая частотная характеристика изменения дальности при пролете цели по траектории, изображенной на рис. 22 110 Прн такой аппроксимации ошибка измерения дальности выражается формулой АД (/со) = Д (/со) Ф6 (/со) (fo (Ф0-передаточная функция по ошибке), а эффективное значение максимальной ошибки вычисляется на частоте, при которой величина АД(/со) имеет максимум: АД(/со) АДэфф = Мешающими воздействиями в системе АСД являются: нестабильность работы временного различителя и устройств временной задержки, обусловленные изменениями условий работы: температуры, питающих напряжении и т. д. (инструментальные ошибки элементов); шумы цели по дальности; внутренние шумы радиоприемного устройства; нестабильность скорости распространения радиоволн. Мешающие воздействия приводят к появлению дополнительных ошибок в системе АСД. Влияние инструментальных ошибок. Изменение внешних условий и питающих напряжений приводит к случайным изменениям напряжения на выходе временного различителя и флуктуациям времени задержки зондирующего импульса. Для интегрирующих BP при прохождении каждой группы импульсов (отраженно- го и следящих) возникает паразитное (добавочное) напряжение Аии.в.рг (t= =0, 1 ... - номер группы импульсов), эквивалентное рассогласованию р Ав pt ьш - Лв.р За п периодов на интегрирующем конденсаторе накопится общее паразитное напряжение (рис. 22-113, с) ип.в.р 2 Aun.B.pj. г=1 Полагая, что для системы АСД дискретную систему можно заменить эквивалентной не- а4* пй.р £ Г П. ип.1.р и>р +> Рис. 22-113. Структурные схемы для учета погрешностей временных различителей. а - исходная схема для учета погрешностей интегрирующих BP; б -схема, в которой пиреш-ность интегрирующего BP приведена к входу; в - исходная схема для учета погрешности пропорционального BP; г - схема, в которой погрешность пропорционального BP приведена к входу. прерывной (см. стр. 213), приходим к заключению, что паразитное напряжение J 1 л ип-в.р- Ип.в.р. п Р Учитывая, что А в.р =Кв.рп1, запишем: 1 Кв.р t Кр п-в.р - Ьп.в.р - ёп-В.р т р --- р Полное напряжение на выходе BP будет при этом * I / .II- \ в.р = -J-1 + п-в.р = -у (£ + п.в.р), что отображается структурной схемой на рис. 22-113,6. Таким образом, паразитные напряжения, накапливаемые на конденсаторе BP вследствие нестабильности его работы, эквивалентны появлению дополнительного рассогласования п.в.р в системе АСД (рис. 22-114). 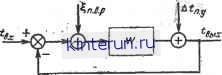 Рис. 22-114. Структурная схема при учете нестабильности элементов: временных различителей и устройства временной задержки. В схеме пропорционального BP нестабильность сводится к добавлению на выходе BP паразитного напряжения ип.в.р (рис. 22-113, в), вполне аналогичного дрейфу нуля в усилителях постоянного тока. Это эквивалентно добавлению рассогласования п.в.р=Ип.в.р/гчр на вход временного различителя (рис. 22-113, г). Таким образом, инструментальная погрешность BP обоих типов сводится к появлению в системе дополнительного рассогласования gn.B.p. Нестабильность работы устройства временной задержки в первом приближении можно учесть добавлением случайной величины Лгп.у на его выход (рис. 22-114). Общая ошибка воспроизведения, обусловленная инструментальными погрешностями элементов, W * J Seoc ~l\hw ёп.в-р + j ц7 Ап-У = ф£г,в.Р + фе Ч.,. где Ф и Ф - передаточные функции замк- нутой системы и передаточная функция по рассогласованию; босв.р=Фп.в.р; вос.у = =Фе Afn.y - составляющие ошибки воспроизведения. Если gn.B.p - медленно меняющаяся функция времени, то составляющая ошибки воспроизведения, обусловленная погрешностями BP, почти полностью равна gn.B.p, поскольку при этом можно приближенно полагать: вос.вр = £п.в.рФ(0) = gn.B.p, поскольку Ф (0) = 1. Интегрирующий BP не должен иметь систематической погрешности по напряжению п.в.р, так как в противном случае возникает нарастающая (по модулю) ошибка по п.в.р и, следовательно, нарастающая ошибка gB0c.B.p. Если нестабильность Агп.у устройства временной задержки является медленно меняющейся функцией времени (например, Агп.у обусловлена изменением температуры или давления), то составляющая ошибки воспроизведения, обусловленная этой причиной, равна нулю: восу=0. В случае быстрых изменений Агп.у (обусловленных, например, пульсациями источников питания) ошибка gBocy будет тем больше, чем выше частота /п изменений ДГп.у. Если /п много бОЛЬШе ПОЛОСЫ СИСТеМЫ, ТО gBOC.y(0~An.y и пульсации временной задержки полностью переносятся иа ошибку воспроизведения. В случае хаотических изменений Afn.y дисперсия ошибки при известной спектральной плотности Sn.y (<в) определяется по формуле (см. разд. 21) °вос.у = ~ J К И2 п.у < >) * Дисперсия этой ошибки будет тем меньше, чем шире полоса пропускания системы. Ошибки, обусловленные шумом цели. Отражающий объект (цель) при работе в сантиметровом и дециметровом диапазоне волн можно приближенно толковать как совокупность случайно перемещающихся отражающих точек (см. об этом подробнее - стр. 47). Вследствие интерференции сигналов, отраженных от этих точек, случайным образом изменяются интенсивность поля у приемной антенны системы АСД и временное запаздывание огибающей радиоимпульса. Изменение силы поля приводит (если ие достигается порог ограничения каскадов, предшествующих временному различителю) к случайным изменениям коэффипиента передачи BP системы АСД. Анализ систем АСд с учетом случайности коэффициента передачи приведен в [Л. 17]. 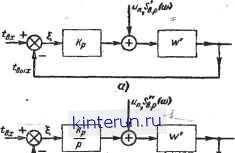 1вй/Х Рис. 22-115. Структурные схемы для вычисления ошибок, обусловленных шумом на входе приемника. а - система с пропорциональным BP; б - система с интегрирующим BP. Случайные изменения временного запаздывания вызывают ошибки систем АСД. Экспериментально установлено [Л. 10, стр. 378], что среднеквадратическая ошибка, обусловленная этой причиной, достигает величины, близкой к 0,2 L, где L - наибольший линейный размер цели.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


