
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Для построения единственной фазовой траектории (см. разд. 21) необходимо к прямой и добавить взятую с обратным знаком характеристику BP (рис. 22-86, а), предварительно увеличив ее в Ку раз. На рис. 22-101, а приведена одна траектория, а на рис. 22-101,6 четыре такие фазовые траектории, соответствующие четырем различным значениям коэффициента Ку (Kyi<Kyii<Kyiu<Kyiv). Каждая точка фазовой траектории определяет значение (n-fT)-ro рассогласования по заданному я-му рассогласованию. Последующее рассогласование нахо- дится по предыдущему (эт) путем построения ступенчатой кривой, как показано на рис. 22-101, с (Напомним, что прямая = =п идет под углом 45° к оси абсцисс.) Характер процесса установления определяется знаком производной фазовой траектории в начале координат. Величина производной находится путем дифференцирования равенства (22-56) по п: Следовательно, при К>1 производная отрицательна (кривые -IV на рис. 22-101,6) и процесс установления рассогласования будет знакопеременным; при К<1 (рис. 22-101, с, и кривая / на рис. 22-101,6) знак рассогласования в процессе установления не меняется. При К>2 (когда tga>l и а>45°) система будет неустойчивой в линейном приближении и рассогласование £- не будет стремиться к определенному пределу. Однако если кривая %n+i не выходит за пределы квадрата со стороной 2grp, то следящие импульсы не выходят из зацепления с отраженным импульсом. При этом наблюдаются периодические колебания (с периодом Гп) следящих импульсов относительно отраженных импульсов. Такую систему можно назвать условно устойчивой в обобщенном смысле. Условие условной устойчивости выполняется, если (см. рис. 22-101, б) с6<гР, т. е. ас-6с<гР или [Ку ф(макс) [ - £макс < grp. В случае полигональной аппроксимации характеристики BP (см рис. 22-90, а), * 3 Ф (£макс) - КЕ.р g ; 1гр - g и и для критического коэффициента передачи, соответствующего переходу от устойчивого режима к неустойчивому, получаем: ККР=4. Если цель движется равномерно со скоростью va, то фазовая траектория смещается на величину tv вдоль оси ординат (рнс. 22-102), где r =2ti /cFn. Из двух состояний равновесия A\t Ач лишь первое является устойчивым. Ему соответствует постоянное рассогласование уст. Учитывая основное уравнение, находим, что для этого состояния равновесия Куф(уст) = г . (22-57) Полученное равенство определяет установившееся (постоянное) рассогласование-скоростную ошибку уст, которая имеет место в системе при равномерном движении цели.
Рис. 22-102. Фазовые траектории с учетом перемещения цели (tv ФО). Для небольших скоростей цели, когда рассогласование уст, соответствующее точке Л не выходит за пределы линейного участка характеристики BP, КуКв.р gyct =s tv е ty ty буст - v v- v Ay Ав.р Л т. е. установившаяся динамическая ошибка измерения дальности £уст= ~Г и ДДуст= ~- , так как Кг АГп Гвх = 1>/Кп- Эта формула совпадает с найденной ранее формулой (стр. 207) при анализе линейных *режимов работы системы. Если скорость цели настолько велика, что обе точки At и Лг сливаются в одну, состояние равновесия исчезает и сопровождение цели прекращается. Условие срыва (прекращения) слежения найдется из равенства (22-57) при подстановке значения ggraakc- tv макс - Ку <р(£макс) cFn Ку <р (макс) ц.макс - g Таким образом, учет нелинейности характеристик BP приводит к появлению двух новых явлений - срыва слежения и условной устойчивости (сохране- ния устойчивости при К>2). Благодаря нелинейной зависимости ср() достигается также селекция целей по дальности, поскольку при расстояниях между объектами, соответствующих рассогласованиям, превышающим ±Гр, слежение осуществляется только за одним из них, а другие объекты на процесс сопровождения влияния не оказывают. Система АСД как система непрерывного регулирования В реальных условиях работы параметры систем АСД обычно выбираются так, что правомерна замена дискретной системы эквивалентной системой непрерывного регулирования. Не останавливаясь на формулировке условий, при которых такая замена допустима (см. стр. 121) отметим, что погрешность будет тем меньше, чем больше периодов Ти приходится на время процесса установления в эквивалентной непрерывной системе. Предполагается, что система АСД является линейной. Тогда пропорциональный BP заменяется эквивалентным пропорциональным звеном с коэффициентом передачи КР (рис. 22-103). Для интегрирующего BP п *в.р : iiTn* т. e. в.р(Р)=: i(P) p KP = Kv.pFn. Таким образом, BP эквивалентен интегрирующему звену с коэффициентом передачи Кр. Если условиться считать, что произведения коэффициентов передачи пропорционального BP и интегратора системы гАкг I- Рис. 22-103. Общая структурная схема системы АСД, рассматриваемой как система непрерывного регулирования. fp. Ку -коэффициенты передачи BP и устройства временной задержки; Wn g (р) - передаточная функция промежуточных элементов системы. АСД составляют величину, равную Кр (если принять Д и = 1), обе структурные схемы системы с интегрирующим BP и пропорциональным BP и интегратором совпадут и сведутся к эквивалентной структурной схеме с передаточной функцией (рис. 22-103) W(p) = KpWu,s{p)Kr. Свойства систем АСД зависят от их структуры. Типовыми являются система АСД с одним интегратором, а также с двумя интеграторами и корректирующей цепью. Система АСД с одним интегратором. В системе с интегрирующим BP 7b.p=Kp/p и в состав системы, помимо BP, входит звено с коэффициентом передачи Ку (устройство временной задержки). В системе с пропорциональным BP, помимо звеньев с коэффициентами передачи Кр и Ку, имеется интегрирующий элемент (т. е. WB.a(p) = =Ки/р -рис. 22-104.С). 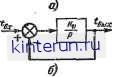 Рис. 22-104. Структурная схема системы АСД с одним интегратором. а - исходная; б - приведенная. Таким образом, передаточная функция разомкнутой системы в обоих случаях (рис. 22-104,6) V(p) = где коэффициент передачи по скорости Kv = ЛрЛу=Кв.рЛуЕ11=КЕГ1-для системы с интегрирующим BP; Кр Ку Ки - Для системы с пропорциональным BP. Передаточная функция замкнутой системы Ф(Р) = р+К& тр +1 (здесь t=1/Kd) эквивалентна инерционному звену. Переходная характеристика системы представляет собой экспоненту с постоянной времени т h (г) == 1 - е т . При скачке величины входного времени Гвю выходная величина = t ЕХ о (l - е Т ) ьвых (0 ~ ьвх о Время регулирования в системе 2,5 2,5т= Замена дискретной системы непрерывной допустима, если гр>Гп. Выразим это условие равенством tv=mTu, где т>1 (например /и=25). Следовательно, должно выполняться условие: 2,5/Л\,Зг25 Тп, т. е. Kv s£ 0,1 Fu[1/сек]. Таким образом, замена допустима при достаточно малом по сравнению с частотой повторения коэффициенте передачи. Учитывая, что Kv=KFu, получаем условие эквивалентности в виде К = Кв.рК? < 0,1. При постоянной скорости перемещения цели vn в системе устанавливается скоростная ошибка АД уст ~ Система АСД обладает памятью по дальности. Это означает, что при глубоких замираниях (федингах - см. стр. 220), когда амплитуда отраженного импульса становится очень малой (близкой к нулю) и цепь регулирования размыкается, напряжение у на выходе интегратора остается неизменным. Следовательно, сохраняется неизменным (запоминается) временное положение следящих импульсов, т. е. величина *вых. Если, пока происходит замирание, отраженный и следящий импульсы разошлись во времени незначительно, режим слежения вновь восстанавливается. Система с одним интегратором и инерционным звеном. В некоторых случаях BP следует аппроксимировать не пропорциональным, а инерционным звеном. Это бывает, например, если в интегрирующем BP учесть шунтирующее действие входного сопротивления последующих каскадов или в
Рис. 22-105. Структурная схема системы АСД с учетом инерционности временного различителя. пропорциональном BP учесть инерцион- ность сглаживающих фильтров. Тогда для достижения астатизма в систему вводят дополнительный интегратор Н?п.э-Ди/р и структурная схема системы приобретает вид рис. 22-105. Передаточные функции разомкнутой и замкнутой систем будут соответственно ИР(Р)=- Р{Тр+\) где Кх=КрКиКу. - ф(р) = В динамическом отношении система эквивалентна звену 2-го порядка с эквивалентной постоянной времени (собственным периодом колебаний) и относительным коэффициентом колебательности, равными соответственно 2VTKv Если не вводить корректирующих цепей, то параметры системы оказываются однозначно связанными определенными соотношениями. Так, учитывая, что эквивалентная полоса системы (см. табл. 21-8) &Fa=Kv/2, а величина £ должна быть порядка 0,7, получаем: 1; AFa = 0,5/Т; TAFa = 0,5. Если указанные соотношения ие выполняются, то для получения благоприятных динамических характеристик при независимом выборе величин Г и Kv необходимо вводить в систему корректирующие цепи. Условие эквивалентности непрерывной и дискретной систем можно получить, если учесть, что время установления гуСт должно быть во много раз больше Тп, например Густ =25 Гп. Из кривых рис. 21-27 для £=1 находим: fу с т = (8-Ы 0) тэ = (8 Учитывая, что произведение TKv не должно сильно отличаться от величины TKv = 1, находим, что замена дискретной системы непрерывной справедлива, если Kv < 8 о 10 25 Тп (0,3-=-0,4) Ра, где Fn= 1/Тп - частота повторения импульсов. Система АСД с двумя интеграторами (рнс. 22-106). Так как система с двумя последовательно включенными интеграторами Кт/р и Kmlp неустойчива, в нее необходимо ввести стабилизирующую (корректирующую) цепь. Первый из двух интеграторов может быть образован интегрирующим временным различителей. Так как исполнительное устройство безынерционно, практически, для коррекции можно ограничиться простейшей форсирующей цепью WK(p) (рис. 22-106, а) или охватить второй интегратор прямой связью Кк (рис. 22-106,6). В динамическом отношении обе системы эквивалентны, если не считаться с инерционностью реального форсирующего звена (постоянная времени Г). Действительно, управляющее напряжение в схеме на рнс. 22-106, а: у (Р) = (Р) 1 (Р) КтКк (ГкР+1) Р Тр + 1
|
||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


