
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств АВТОМАТ И КА РАДИОУСТРОЙСТВ [Разд. 22 Структурные схемы линейных систем АСД. Анализ дискретных линейных режимов В линейном режиме система работает при малых рассогласованиях £. когда рабочая точка не выходит за пределы линейных участков a, b характеристик временных различителей (рис. 22-86). Структурная
 гт зт ¥гп 8р к j , yft Рис 22-94. Временные диаграммы напряжений на выходе BP различных типов. а - пропорциональный с детектором со сбросом; б - интегрирующий. схема системы зависит от вида используемого временного различителя. На рис. 22-94 изображены временные диаграммы напряжений на выходе различителей, для которых будет находиться эквивалентная структурная схема. Величина ив.г,[пТп] напряжения на выходе пропорционального BP (рис. 22-94, а) пропорциональна рассогласованию £и в и-й период повторения импульсов: в.р[м7У1 = /Ср gn.  Временная диаграмма соответствует использованию детектора со сбросом, причем без существенной погрешности можно считать, что величина At настолько мала, что не влияет на процессы в системе. В этих условиях BP является экстраполятором нулевого порядка, и, следовательно, его можно представить в виде 6-ключа и формирующего устройства с передаточной функцией (см. стр. 106) Гг- 1 Здесь г - параметр z-преобразования, р - оператор преобразования Лапласа, К? - коэффициент передачи временного различителя. Обозначив передаточную функцию промежуточных элементов W .a(p) и учиты вая, что коэффициент передачи исполнительного устройства равен Ку, придем к структурной схеме на рис. 22-95, а. Напряжение Uy при этом связано линейной зависимостью с выходной величиной £Вых и, следовательно, пропорционально измеренному значению дальности Ди- Импульсная передаточная функция разомкнутой системы (см. (21-83), стр. 106). W(z) = у дец.э (p)J , где Кз=КрКу - коэффициент передачи системы. Для BP интегрирующего типа на линейном участке напряжение на выходе после прохождения гг-го отраженного импульса остается постоянным (рис. 22-94, б) и равным 41р=А ..р[Тп]. причем ДИв.р[1Гп] = Кв.р. иушДИ
ttjux и шдя
Рис. 22-95. Структурные схемы систем АСД с различными типами временных различителей. а - с инерционным BP; ЭНП - зкстраполятор нулевого порядка; б - с интегрирующим BP; в.р напряжение на выходе BP; иу - управляющее напряжение. При написании этой и последующих формул полагают, что первый по времени отраженный импульс соответствует и=0. Учитывая, что z-преобразование суммы выражается формулой (см. стр. 96) { Yi А в р [пГп] J = j~ F (г), где F(z) - г-преобразование функции Див.р, получаем: Z{uB.p[nTn]}=KB.p - решетчатои Той же передаточной функцией с точностью до постоянного множителя описывается соединение экстраполятора нулевого порядка и интегрирующего звена (см. выражение 21-84, стр. 107), так что дискретная передаточная функция эквивалентного формирующего устройства будет: Яв.р г - 1 f 1 I Следовательно, структурная схема интегрирующего BP состоит из 6-ключа и звеньев /Св.р г-i ~гт -> чР Для получения структурен г ной схемы всей системы необходимо ввести передаточную функцию промежуточных элементов Wn.a (р). Импульсная передаточная функция разомкнутой системы (22-4П Система с одним интегратором. Для пропорционального BP промежуточные элементы представляют собой интегрирующее звено и, следовательно Ип.э (/>)=- Р Таким образом, импульсная передаточная функция (рис. 22-96) W (г) = Кэ (22-42) &-KJI Здесь обозначено: К=КаТП=КрКуТП- коэффициент передачи системы. В случае использования интегрирующего BP промежуточные элементы отсутствуют, т. е. 1Уп.в = 1. Поэтому из (22-41) получаем: И7(г) = /С-ц-, (22-45) г- 1 где К =/Св.РКу -коэффициент передачи системы. Таким образом, передаточные функции обеих систем тождественны. В соответствии с выражением (21-90) (стр. 108) передаточная функция замкнутой системы (для е=0) ф(г)== М =-(22.46) w 1 -+ W (г) г - 1 -+ К Найдем условия устойчивости. В соответствии с алгебраическим критерием (см. стр. 117) запишем полином знаменателя певедаточной функции В(г) = b0z + btz = z-1 +/С, b0 = I; 6, =- l + K. Система устойчива, если b0+bt>0 и bo-bi>0. Первое из этих условий приводит к тривиальному результату: /С>0. Второ дает: 1 + 1-ТОО или /С<2. Таким образом, в системе существует критический коэффициент передачи /Скр=2, превышение кото рого ведет к потере устойчивости. Система с передаточной функцией (22-46) является астатической с астатизмом первого порядка, поскольку W(z) имеет однократный полюс в точке z=l (см. стр. 11Б). Отсюда следует, что при постоянном входном сигнале установившееся значение ошибки £Уст=0, а при линейно нарастающем сигнале устанавливается постоянная (скоростная) ошибка [см. разд. 21, формулу 21-121] ьуст - где Гвх- постоянная скорость изменения входной величины. Переходная характеристика системы находится из равенства (21-108), которое запишем для е=0 А[пГп] = Ф[1]- Рис. 22-96. Эквивалентная структур-ная схема системы АСД как системы дискретного регулирования. Учитывая (см. стр. 91, табл. 21-9), что Тпг (г-1)2 получаем: W (г) = Кэ Тл-- = К- г - 1 г - (22-43) (22-44) 2- B(zv)(l-zv) v Здесь zv - полюсы передаточной функции (22-46). В нашем случае есть единственный полюс: 2!=-(-1+) = !-К. Так как Ф[Ц= 1, A (zv) =К, В (zv) = 1, то - h[n] = tBhlx[n] = = 1 - (1- K)n. (22-47) Вид переходной характеристики зависит от величины К (рис. 22-97). При К<1, как следует из выражения (22-47), процесс установления носит нара-ст ющий характер; при Л >1 (но К<2) процесс установления является колебательно-затухающим К-0,3 В соответствии с выражением (22-42) для модифицированной импульсной передаточной функции (с учетом е) запишем:  Тп 2Т ЗТ 4Т 5Г а) 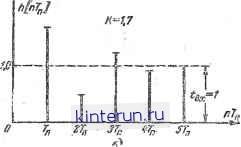 Рис. 22-97. Переходные характеристики систем АСД в дискретных точках п Тъ- о -для К<1; б -для К>1. Заметим, что формально можно найти величину Гцых также в промежуточных точках. Однако выходные селекторные импульсы и, следовательно, величину гВых южно наблюдать только в дискретные моменты времени пТш. Непрерывно меняется лишь управляющее напряжение иу[пТп, е]= h[nTn, е] = -~-, причем значения иу могут быть найдены в любой промежуточной точке периода. Для этого достаточно записать передаточную функцию разомкнутой системы (см. рис. 22-96) в виде W(z, е), а замкнутой- в виде Ф(г, е) и применить соответствующие формулы гл. 21. Здесь выявляются различия между схемами с пропорциональным и интегрирухдщим BP. В первом случае происходит интегрирование напряжения на ив.р, так что при постоянном рассогласовании выходное напряжение в интервалах между точками nTu BP изменяется линейно (рис. 22-98). Во втором случае напряжение в интервалах между точками пТв сохраняется постоянным и скачкообразно изменяется в каждой тактовой точке на такую определенную, величину, что оба напряжения в тактовых точках оказываются одинаковыми. Найдем математически характер изменения величины в промежуточных точках переходной характеристики для системы АСД с пропорциональным BP. W(z, 8) = Кэ-ZE что дает (см. табл. 21-9) г -1 W (г, е) = Кэ-г Учитывая формулу (21-90, стр. 108) W (г, е) Ф(г, е) получаем: Ф(г, е) = I + W (г) кэтг г -1 еГп (г - 1) + Гп Кв(г - 1) + К г-1 + д-эГп г-1 + Л Тогда в соответствии с формулой (21-108) запишем: Ф(1,е) = 1; г = 1- К; Л(г ,е) = = -K2e+/C; B(2V) = 1 и, следовательно, Л[лГ 1=1 + (/Гв-1)(1-ДС) , у= [1-(1-K)n+K& (1-Л )*]. (22-48) Таким образом, напряжение иу на входе устройства временной задержки в интервалах между тактовыми точками меняется по закону (22-48) (см. рис. 22-98), uJnT, t]K к=17  т гтп зтп ч 5тп Рис. 22-98. Зависимость управляющего напряжения от времени для системы АСД с пропорциональным BP. Запишем далее передаточную функцию для ошибки В соответствии с равенством (21-92) получим: 1 г-1 Ф/(г) = l + W(z) z - 1-тК
|
|||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


