
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств включена в цепь электронного усилителя. Передаточная функция магнитного усилителя ТуР+1 где /См-у- коэффициент передачи магнитного усилителя; Ту - постоянная времени цепи управления. Постоянные времени Ту в приведенных формулах находятся как отношение индуктивности соответствующих обмоток к сумме собственного сопротивления обмотки Ry и внутреннего сопротивления RDB источника, питающего эту обмотку: Гу= ь. . Ry ~Ь вн При включении управляющих обмоток через ламповый усилитель сопротивление RBB равно внутреннему сопротивлению лампы, причем чаще всего две Отсюда следует, что благодаря включению обмотки через ламповый усилитель резко снижается инерционность управляющей обмотки, что благоприятно сказывается на динамических свойствах исполнительных устройств. Передаточная функция исполнительного двигателя постоянного тока (см. разд. 21) №ДВ(Р) = дв Р(Т№р + \) Такой же функцией приближенно можно описать свойства двигателя переменного тока. Выходной вал двигателя соединяется с антенной через редуктор, благодаря чему понижается число оборотов и увет чизает-ся вращающий момент. При этом выходной угол Хш = Дрвдв. Величина /Cp<Sl есть коэффициент передачи редуктора. Благодаря использованию редуктора в 1/Лр раз увеличивается момент на выходном валу редуктора и в 1/Ар раз уменьшается момент инерции нагрузки, приведенный к выходному валу двигателя. Это очень важно, поскольку момент инерции нагрузки в сотни и тысячи раз может превосходить момент инерции якоря двигателя. Вследствие применения редуктора общий момент инерции ротора двигателя и нагрузки (а следовательно, постоянная времени 7ДВ) при подключении нагрузки увеличивается не очень сильно (иа 20-100%). При использовании в качестве исполнительного привода гироскопа напряжение усилителя подается на моментный датчик. Благодаря этому на соответствующую рамку гироскопа накладывается момент и гироскоп начинает прецессировать со ско- ростью, пропорциональной приложенному моменту или напряжению иу с выхода усилителя. Передаточная функция гироскопа приближенно описывается интегрирующим звеном. Wr(p)= - =-. Uy р (Коэффициент Кт имеет размерность град/в сек.) Заметим, что гироскоп в отличие от двигателя осуществляет поворот антенной  Рис. 22-7). Диаграмма напряжения при управлении двигателем с использованием широтно-моду-лированных импульсов. Диаграммы соответствуют у<0. Для импульсов, обозначенных пунктиром, Uy =0. системы относительно инерциального пространства, а не оси объекта, на котором установлена система АСН (самолет, ракета и т. д.). Это важно при использовании системы АСН в качестве углового координатора в устройствах радиоуправления (см. гл. 27). При использовании в качестве усилительных элементов мощных транзисторов или тиристоров управляющее напряжение % преобразуется в последовательность широтно-модулированных импульсов (г) (рис. 22-71). При этом относительная разность времени Тх и Т2 этих импульсов Т* - Тш пропорциональна управ- Т\ л- т% т ляющему напряжению щ, так что Tj - Т2 иу = ци0 - , где T=Ti + T2 - период повторения импульсов. Импульсы u(t) после усиления поступают на исполнительный двигатель. Такой способ управления двигателем удобен тем, что транзисторные усилители работают в ключевом режиме, что позволяет снизить до минимума дрейф нуля при изменении температуры. Для придания системам АСН необходимых динамических свойств используются цепи коррекции последовательные и параллельные. В системах АСН с двигателем переменного тока и гироскопическим приводом применяют цепь последовательной коррекции (интегро-дифференцирую- веязнгациениов устройство \ир.д Исполнительное устройство Т.ГР Рис. 22-72. Структурная схема системы АСН (пример). щий контур - см стр. 31) При этом двигатель охватывается тахометрической обратной связью (см. стр. 38), что позволяет уменьшать эквивалентную постоянную времени двигателя. В системах с двигателем постоянного тока и электромашинным усилителем используют, параллельную коррекцию, (см. стр. 52), причем цепью коррекции охватываются двигатель и ЭМУ. Устойчивость, установившиеся режимы, переходная характеристика систем АСН. Балансировка и фазировка системы Структурная схема системы АСН приведена на рис. 22-72. Она изображена для одного канала применительно к пеленга-ционному устройству с коническим сканированием (элементы Km, Кус, Кф.д) и исполнительному устройству с двигателем переменного тока, охваченным тахометрической обратной связью (W?.T), магнитным усилителем (№м.у) и последовательным корректирующим контуром (WK). Передаточная функция разомкнутой системы КуУ?к ~ Р (Тд.бР + 1) (Г .у Р + 1) (7ф.др + 1) Здесь Kv - КтКусКкКм уКпвКр} Kv-коэффициент передачи системы по скорости, 1/сек; Кк-коэффициент передачи корректирующей цепи (для пассивной цепи обычно tfK = H7K(0) = l); 1 +К№К ТР 1 + Яде Ktv [см. стр. 38); Ктг - коэффициент передачи тахогенератора. Величина К v является важным параметром системы АСН. В зависимости от назначения системы Kv может иметь различную величину, достигая значений 200- 500 1/сек. [Л. 10, 11]. Для многих исследований передаточную функцию W(p) достаточно аппроксимировать выражением В7,(р)= . (22-35) P(7,ip + l)(7eP+ 1) которому соответствует структурная схема на рис. 22-73, а, или еще более простым выражением (структурная схема на рис. 22-73,6 ). 
Рис. 22-73. Упрощенные структурные схемы, используемые при анализе систем АСН. а - с форсирующим звеном коррекции; б - без корректирующих устройств. На рис. 22-74 приведен пример ЛАХ системы АСН (см. [Л. 10, стр. 304]) с передаточной функцией (22-35) и параметрами: /( =500 1/сек, r4=l/coi=5 сек, Гк = 1/сок= =0,2 сек, 73=1/со3=0,0125 сек, сос=15 1/сек, полоса системы В~6 гц (о построении ЛАХ -см. гл. 21). Устойчивость системы н нужные показатели качества при заданном коэффициенте Kv обеспечиваются рациональным подбором характеристик корректирующей цепи. Более точный расчет производится с учетом величины ошибок воспроизведения (см. стр. 194). В установившемся режиме система АСН характеризуется как любая следящая система коэффициентами ошибок (см. стр. 55). Если входной сигнал изменяется с постоянной скоростью,т. е. у=<вц (цель дви- жется вокруг точки установки системы АСН С ПОСТОЯННОЙ уГЛОВОЙ СКОРОСТЬЮ СОц), то в системе устанавливается постоянное угловое рассогласование (скоростная ошибка) Постоянное входное воздействие отрабатывается без ошибок. Считая режим установившимся, т. е. полагая в последней формуле р=0, получаем: 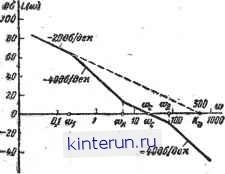 Рис. 22-74. Пример ЛАХ системы АСН. -iJll Рис. 22-75. Структурная схема для анализа ошибки бдр. обусловленной влиянием дрейфа нуля усилителей постоянного тока (ДИдр). Поскольку в составе исполнительного устройства имеются усилители постоянного тока, система нуждается в предварительной балансировке, состоящей в установке нулевых сигналов рассогласования при нулевом напряжении п.у=0 на выходе пеленгациоиного устройства. Если балансировка нарушается, то в системе возникает ошибка. Практически уход параметров (дрейф ДмДР усилителей постоянного тока) происходит достаточно медленно, так что при вычислении ошибки, вызванной разбалансом, режим можно считать установившимся. В соответствии со схемой на рис. 22-75 для ошибки бдр, вызванной разбалансом (дрейфом) Д др и формулами, приведенными на стр. 44, можно записать: 1 -Ь W. др> где И72 ЯдвАр -- передаточная функ- Р(ТдвР+ 1) ция звеньев, расположенных за точкой ввода напряжения разбаланса Д др. ©др.уст - где Ki- коэффициент передачи элементов структурной схемы, предшествующих точке ввода напряжения дрейфа нуля, Kl = КтКусКф.ц.. Физически последняя формула очевидна: ошибка ©дР.уст должна быть такой, чтобы в точке ввода полностью компенсировалась величина Д ДР (так как режим установившийся и двигатель не вращается), т. е. ©ДР-УСТ Kl ~ ДИдр. Для системы АСН с коническим сканированием важное значение имеет фазиров-ка, состоящая в установке правильной разности фаз между сигналом рассогласования и опорным сигналом на входах фазовых детекторов. При правильной фазировке отклонение по одной из координатных осей (например, по азимуту) не вызывает сигнала на выходе пеленгациоиного устройства другого канала (наклона). Появление дополнительного фазового сдвига Дф (расфаанровка) ведет к тому, что напряжения на выходе пеленгациоиного устройства азимута и угла места вместо п.уж и п.уу (стр. 189) будут равны: ип.уж = UmP соз(ф + Дф) = £/гар X X [cos ф cos Дф - sin ф sin Дф] = *= Ид.ух cos Дф - Uu.yy sin Дф wn.y* - п.ууДф; иы.у = Ump вт(ф + Дф) = = Ump [sin ф cos Дф + cos ф sin Дф] х Ин.уу Г п.ужДф. (Приближенные равенства справедливы для малых Дф.) Последние соотношения говорят о том, что появление дополнительного фазового сдвига Дф эквивалентно повороту системы координат х?у на угол Дф по часовой стрелке (рис. 22-7б,а). Следовательно, в результате ошибки в фазировке на исполнительный двигатель канала азимута будет подано напряжение ипух<иш.ух и он будет вращаться медленнее, чем нужно, а на двигатель какала наклона - напряжение Mn.yj/> n.yy и он будет вращаться быстрее, чем нужно. Ввиду этого равносигнальное направление будет перемещаться к точке U не по линии ОЦ координатной плоскости, а по скручивающейся спирали. Чем больше Дф, тем медленнее скручивается спираль (рис. 22-76,6), и при некотором критическом значении ДфКр система теряет устойчивость (прекращается слежение за целью).
|
||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


