
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Последнее условие вытекает из необходимости неискаженной передачи огибающей и аналогично условию для выбора постоянной времени обычного детектора амилитуд-но-модулированных колебаний. S--® 0- 0.---Д j jgj я) 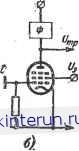 Рнс. 22-66. Пиковый детектор. а - основная схема; б - схема, совмещенная с усилителем сигнала рассогласования; Ф - полосовой (резонансный) фильтр, настроенный на частоту £2. При выполнении указанных условий коэффициент передачи пикового детектора 1 Кд =- 1 + Q где Q=TD/rH- скважность импульсов; квн-внутреннее сопротивление усилителя видеоимпульсов, предшествующего пиковому детектору. Для не очень больших Q величина Кд достигает значений 0,5-0,7. Усилитель импульсов обычно совмещают с узкополосным фильтром Ф. Последний предназначен для предварительной фильтрации огибающей частоты й и имеет вспомогательное значение. Как следует из выражения (22-32), информация об угловом рассогласовании в заключена в коэффициенте модуляции т. В то же время амплитуда огибающей, кро ме величины га, пропорциональна также амплитуде импульсов (jb, что приводит к зависимости коэффициента передачи пеленгационного устройства от амплитуды Umo сигнала на входе приемника. Для исключения этой зависимости в пеленгацнонном устройстве используются одновременно автоматические регулировки усиления двух видов: АРУ назад - в результате действий этой системы достигается значительное уменьшение динамического диапазона амплитуды выходных импульсов 11я (т. е. некоторая стабилизация £/ ); АРУ вперед - в результате действия этой системы для некоторой области значений UB выходное напряжение остается неизменным, т. е. достигается исключение зависимости выходного сигнала от амплитуды импульсов. При осуществлении АРУ вперед коэффициент усиления последующих каскадов (обычно одного каскада усиления УС) является переменным. Этот коэффициент убывает с ростом амплитуд входных импульсов. Для регулировки усиления на сетку лампы усилителя УС вместе с переменной составляющей подается смещение. Величина этого смещения тем больше, чем выше напряжение иш. Обычно прн этом функции пикового детектирования и усиления совмещаются в одной лампе (рис. 22-66,6), где функции диода выполняет участок сетка - катод усилительной лампы, так что на резисторе R выделяются напряжения £/тог и Ue. Амплитуда сигнала рассогласования (Утр == ЗдинКэСпог, где 5дИН - динамическая крутизна лампы; R3- эквивалентное сопротивление фильтра Ф на частоте fi. На некотором участке ab динамической характеристики (рис. 22-67) можно считать, что выполняется условие с 2. л дин - 1Т (22-34) где S0-некоторая постоянная величина (размерность а). При выполнении последнего условия тр RsU Kycm, где Кус-размерный коэффициент переда-- чи каскада.(размерность) Ь, Кус = SqRs.
Рис. 22-67. Зависимость динамической крутизны 5ДИН характеристики усилительной лампы от напряжения смещения с. / - реальная; 2- идеализированная. Если условия малости 6 и (22-34) выполняются, то справедливы следующие соотношения: ГП = Km®, #mp = Кустга, которым отвечает структурная схема на рис. 22-68. Условие (22-34) принципиально нельзя выполнить для очень малых входных сигналов поскольку динамическая крутизна не может неограниченно возрастать. Таким об- разом, условие независимости Ump от Um, и, следовательно, от амплитуды сигнала на входе приемника- можно выполнить лишь для значений t/o, больших некоторой величины U0 (рис. 22-67), т. е. когда сигнал на входе превосходит некоторое минимальное значение Um0. Заметим далее, что структурная схема на рис. 22-68 справедлива также для достаточно малых углов 6, когда в/Во<£1. Рис. 22-68. Структурная схема части пеленгациоиного устройства от угла в до выхода усилителя сигнала рассогласования. С помощью фазовых детекторов осуществляется преобразование полярных координат р, ср (рис. 22-65, б) в напряжения их, иу, пропорциональные прямоугольным координатам х и у отклонения цели от равно-сигнального направления. Обычно в пеленгационных устройствах для этого используются коммутаторные фазовые детекторы, действие которых основано на коммутации параметров усилительных элементов в соответствии с опорным сигналом. Пример такой схемы и временные диаграммы, иллюстрирующие ее работу, представлены на рис. 22-10 и 22-11. Благодаря фильтру RC ФД является инерционным элементом и по отношению к амплитуде сигнала на входе ФД можно описать инерционным звеном с передаточной функцией [см. стр. 151] ф.д Кф.д costp ф.д = -- = - . , Так как опорное напряжение канала наклона {у) сдвинуто по фазе по отношению к опорному напряжению канала азимута (х) на угол я/2, в соответствии с выражением (22-3) для выходных напряжений пеленгационных устройств получим: щук = Кф.литр cos ср; Чш.уу = Кф.д17тр cos(st/2 - ср) = = /Сф.д1тр Sin ф. Соответствующая структурная схема пеленгациоиного устройства изображена на рис. 22-69, а. Поскольку в системе имеются два исполнительных устройства, перемещающих равносигнальное направление вдоль координатных осей х и у, удобно рассматривать не угол в, а у лы рассогласования вдоль координатных осей: азимутальной 6* = =0coscp и угломестной e,j=6sincp. Соответственно удобно считать угол рассогласования комплексным 6 = &х + ]-© . Здесь учитывается не только величина отклонения в, но н направление отклонения (угол ср). Соответственно в коэффициенте  Тф.Ар*1 <-г>.ух 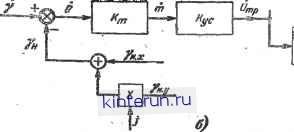
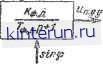 Рис. 22-69. Структурная схема пеленгационных устройств. а - вещественная; б - комплексная. Стрелками у фазовых детекторов показаны операции умножения на cos фл sin<p. модуляции т и сигнале рассогласования Ump учитывается фаза ср: т=те>~4; Ump = Umv-e . В соответствии с этим пространственный угол отклонения цели и угол отработки исполнительного устройства можно записать так: V = V* + /v ; Yh = V* + ftm, где уВх н уиу - выходные углы исполни тельных двигателей (каналов азимута и наклона), причем ®х = ух - увх; ®у = Уу - уву. Приведенные соотношения позволяют изобразить комплексную структурную схему пеленгационного устройства системы АСН как на рис. 22-69,6. Коэффициент передачи пеленгационного устройства для каждого нз каналов выражается следующим образом: Кп уж - Кп.ув Кп.у =КтКусКф.д [в/град] и при достаточно большом уровне сигнала не зависит от амплитуды сигнала на входе приемника и коэффициента усиления приемника. Исполнительные устройства систем АСН В состав исполнительных устройств входят устройства для изменения углового положения равносигнального направления в пространстве; усилители выходных сигналов пеленгационного устройства; корректирующие цепи. Устройства перемещения равносильного направления являются наиболее инерционными элементами системы АСН. В состав исполнительных устройств входит также интегрирующее звено (обычно одно), гак что система АСН является астатической (см. разд. 21). Выбор устройства перемещения равно-сигнального направления зависит от типа пеленгационного устройства. Так, в случае фазовой пеленгации . (стр. 182) поворот фазы для смещения равносигнального направления осуществляется с помощью фер-ритовых вставок, устанавливаемых в волновод. При этом сдвиг фаз обычно регулируется изменением силы магнитного поля, пронизывающего вставку (рис. 22-70). Передаточная функция электрического фазовращателя с учетом инерционности обмотки электромагнита W*-*~ Uy ~Гф.вр+1 Здесь Кф.в - коэффициент передачи фазовращателя, равный отношению угла поворота фазы волны, распространяющейся в волноводе, к напряжению ыу на входе усилителя управляющего сигнала; Тф.в - постоянная времени цепи электромагнита. В качестве промежуточного элемента для придания системе астатизма в этом случае используется гироскоп или интегрирующий двигатель. Чаще всего требуется механический поворот антенной системы. В качестве устройства поворота используются различные сервоприводы. Наибольшее распространение Рис. 22-70. Функциональная схема волноводного электромагнитного фазовращателя. В - волновод: ф - ферритовая вставка: Д - прослойка диэлектрика; ЭМ - электромагнит с обмоткой К. получили электрические двигатели переменного и постоянного тока, а также гироскопические приводы. Могут использоваться также гидравлические или пневматические приводы. Электрическим исполнительным двигателям предшествуют усилители, которые питают исполнительные двигатели энергией. Ясли используется двигатель постоянного тока, то ему предшествует электромашинный усилитель (ЭМУ), передаточная функция которого Кэму К7эму = эму -у (Тур+1)(Тпр + 1) Здесь Кэму - коэффициент передачи ЭМУ, равный отношению напряжений на выходе ( эму) н входе (ыу) усилителя, питающего обмотку управления; Ту - постоянная вре-.менн управляющей (продольной) цепи; LB Та =-- постоянная времени по- перечной цепи; Ья, Яя - индуктивность и сопротивление этой цепи; т?н - сопротивление подключенной к ЭМУ нагрузки (с учетом сопротивления компенсационной обмотки). Двигателю переменного тока (двухфазному асинхронному двигателю) обычно предшествует магнитный усилитель, управляющая цепь которого в свою очередь
|
||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


