
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств сигнала. Графики зависимости относительной величины (Кп.у)отв от ц даны на рис. 22-63. Здесь (Ап.у)ота=--ггттг-; Аф.дЛо/ Аару Ц = СС Ас мАа ру о- Кривые соответствуют различным значениям угла Во разноса диаграмм направленности по отношению и ширине диаграммы направленности 0О. Наиболее распространены следующие аппроксимации: 2/i (х) 2я a) F (В)= - , где х = -- RD sin В. X Л. Здесь Jx- функция Бесселя первого рода первого порядка; Ro- радиус раскрыва; Я- длина волны. 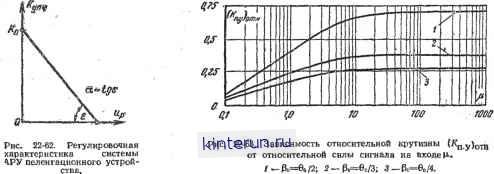 Для достаточно больших амплитуд сигналов на входе, когда кАсмАупчАаруто[Е(Во- ©) + + F(6o+©)] 1, (22-28) п-у ~ А0Аф.д[Р(р-в)-Р(р0 + в)1 * /Сару IF (Ро -ey + FQo + B)] и выходное напряжение, а также Ап.у не зависят от величины входного сигнала. В этом случае АрАф.д COS ф Ап.у : аАару где, как и раньше (стр. 182), кт cos ф,
(пассив- Am = ная пеленгация); (22-29) [ dp Ift, G(po) (активная пеленгация). F~mG ~ 2KmF ~ Поскольку заданных динамических свойств систем АСН можно достичь только при определенных значениях Ап.у, рабочими режимами будут такие, прн которых сигнал на входе достаточно велик н выполняется неравенство (22-28). Величины AmF и Am о удобно выразить через ширину луча. Для этого необходимо задаться выражением, аппроксимирующим функцию F(f>). Этой формулой обычно аппроксимируется диаграмма для параболоида вращения при равномерном распределении поля в рас-крыве. Для этого случая Здесь во - ширина луча в градусах о половинной мощности, связанная с К и R0 соотношением б) F(P) = cos*P; (Go - ширина луча по половинной мощности) ; -1.4 т2 в) F(P)=e \ej (0о - ширина луча по половинной мощности); Неодинаковость фазовых набегов (ф# ¥=0) приводит только к уменьшению крутизны пеленгационной характеристики, причем для ф<10-г-25° с этим уменьшением можно практически не считаться, а такое различие полагать допустимым. Можно показать, что неодинаковость коэффициентов передачи суммарного и разностного каналов также не приводит к смещению равно-сигнального направления, а вызывает только уменьшение Ап.у. Величину Во обычно выбирают так, чтобы диаграммы пересекались на уровне половинной мощности. При меньших величинах Во уменьшается коэффициент Km, а при больших - сильно уменьшается мощность сигналов в равносигнальном направлении (т. е. снижается дальность действия). Максимум диаграммы расположен под углом Во к оси вращения. След максимума (точка М) на плоскости хОу является окружностью с центром в точке 0. Для малых отклонений р от равноснгнального направления (малых углов рассогласования Э) огибающую можно считать сннусоидаль- НвпрвЬл. МШ. 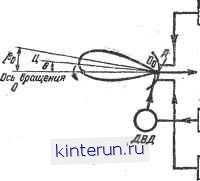
St/2 Ум * Рис 22-64. Функциональная схема системы АСН с последовательным сравнением сигналов и амплитудной пеленгацией (коническим сканированием). ПУ, ИУХ и #*у - пеленгационное н исполнительные устройства; А - антенна; ЯР-приемник; \ ГОС - генератор опорных сигналов; ДБД- двигатель вращения диаграммы. При переходе к пространственной пеленгации стремятся извлечь возможно большую мощность из поля, вследствие чего используют не два одинаковых пеленгационных устройства со взаимно перпендикулярным расположением координатных плоскостей, а более сложную схему обработки сигналов. . Амплитудная пеленгация с последовательным сравнением сигналов. Системы АСН этого типа чаще всего выполняются так, что диаграмма направленности вра щается вокруг оси, причем максимум диаграммы смещен относительно оси вращения на некоторый угол (система с коническим сканированием). Рассмотрим функциональную схему такой системы применительно к импульсному режиму работы для случая пассивной пе-ченгацни (рис. 22-64). При отклонении направления на цель относительно оси вращения Оф принятые сигналы оказываются модулированными по амплитуде, причем коэффициент модуляпии т определяется величиной угла отклонения в, а фаза <р (отсчитываемая относительно колебания, сфазированного с вращением диаграммы) - направлением отклонения от источника радиосигналов (цели Ц). Это иллюстрируется рис. -22-65, а, где изображена плоскость хОу, проходящая через цель Ц перпендикулярно оси вращения диаграммы 0О0. Оси координат х и у параллельны осям х0 и ув, по которым осуществляется управление положением равноснгнального направления по азимуту и наклону. 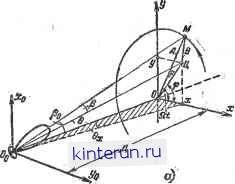
at * б) Рис. 22-65. Диаграммы для иллюстрации принципа действия системы АСН. а - пространственная; б - взаимное мгновенное положение точек М, О и Ц на плоскости хОу; точка М совершает вращательное движение вокруг центра О с угловой скоростью Й ной с амплитудой, пропорциональной р, и фазой ф. В свою очередь при достаточно больших расстояниях до цели р Дв и, следовательно, коэффициент модуляции т пропорционален углу 6. После выделения огибающей детектором огибающей (ДО) (рнс. 22-64) и усиления (УС) сигнал рассогласования частоты fi вращения диаграммы (частоты сканирования) проходит на два фазовых детектора азимута (ФДх) н наклона (ФДУ). На те же фазовые детекторы от генератора опорных сигналов (ГОС) подаются опорные сигналы, сдвинутые по фазе на угол 90°. В результате этого в фазовых детекторах вы рабатываются два находящихся в квадратуре напряжения ип.ух = р cos ф и иш.уу = s р sin ф. Эти напряжения подаются на исполнительные устройства каналов азимута (ИУХ) и наклона (ИУУ). Исполнительные двигатели осуществляют поворот равно-сигнального направления вдоль координатных осей хе и г/о (или х и у), в результате чего величина р поддерживается достаточно малой и равносигнальное направление-(ось вращения диаграммы) следит за угловыми перемещениями цели Д. Сигнал на входе приемника при пассивной (односторонней) пеленгации вх = UmoF (B)sin(coi - q>i), где UmV - амплитуда импульсов в направлении максимума диаграммы (т. е. при 6= =0), ф! - фаза высокочастотного сигнала, F (В) - нормированная диаграмма направленности. Считая расстояния Д достаточно большими (углы В, в и Во малыми), из рис. 22-65,6 получаем: В = 1/(1 cos Qt - р cos ф)2 -f- + (A sin Qt - р sin ф)2. Учитывая, что при этих условиях р Дв, Л ДВо, ВяДВ, находим: 6 = )/ 6 + 02+2Bo0cos(fir -ф). (22- Ограничиваясь малыми угловыми рассогласованиями 6 (по сравнению с утлом Во), т. е. полагая e/Bo-Cl, из последнего выражения получаем: в = ро + др. ДР = - 6 cos (fir - ф). Отсюда, разлагая функцию Р(Ро+ДР) в степенной ряд, для амплитуды импульсов на входе приемника находим: = ито f (р0) + др + - -]. (22-31) Ограничиваясь двумя членами разложения, запишем: Um t7m0F(Po)[l -f +KmF@ COS(fii- ф],
При активной пеленгации во всех предыдущих формулах F(P) необходимо заменить на G(P)=F2(P), a Kmw на Кто=2Ктг. В дальнейшем вместо Ктш и Кто будем писать коэффициент Km, полагая, что КпР при пассивной пеленгации; КтВ при активной пеленгации. При отклонении цели от равносигиального направления на угол 6 импульсы на входе радиоприемника будут модулированы по амплитуде с коэффициентом т=Кт&, причем фаза огибающей равна углу отклонения ф цели относительно оси ОоО, принятой за начальную. Заметим, что формула (22-30) позволяет, разлагая функцию F(p) в ряд Фурье, вычислить амплитуды всех гармоник огибающей для любых углов отклонения р, не ограничиваясь малыми углами рассогласования. Для амплитуды видеоимпульсов на выходе приемника (после усиления н детектирования) можно записать: tVnp = <7И[1 + icos(fit- ф)], где t7E==Anpi7mo/;(Po)-среднее значение амплитуды видеоимпульсов на выходе приемника; т - Кт® - коэффициент модуляции; Кшр - коэффициент усиления радиоприемного устройства. В детекторе огибающей (ДО) осуществляется выделение (детектирование) огибающей Ног = Кв.иЕт cos(fii - ф) = = Vmov cos(fir - ф) (22-32) и постоянной составляющей U в = Кж11к. (22-33) В качестве детектора огибающей используется обычно пиковый детектор (рис. 22-66, а), параметры которого выбираются из соотношений RKC < гЕ; RC Тп; RC<----, где RR- прямое сопротивление диода Д; tK и ТП- длительность импульсов и период их повторения.
|
||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


