
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Зависимость отношения полос схватывания и удержания у от величины А = - ДсомГк приведена на рис. 22-50. Для больших значений А величина у стремится к пределу у га у Гк/Г; отсюда следует, что введение 48 42
Рис. 22-50. Зависимость относительной полосы схватывания у от величины А (8/яЖд КуТк для различных параметров пропорционально-интегрирующего фильтра. 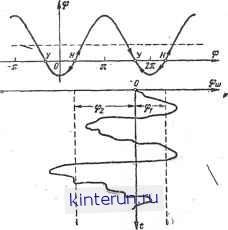 Рис. 22-51. Графическая иллюстрация явления расхождения частот, обусловленных фазовыми шумами Фш большого уровня. Фи Фа - границы, при достижении которых происходит изменение фазы на 2--переход системы в новое устойчивое состояние равновесия. Граница ЧЧ достигается чаще, чем <р2 и в среднем fp растет. . пропорционально-интегрирующего фильтра-позволяет расширить полосу схватывания при той же постоянной времени Г инерционного фильтра. Действие помех достаточно большого уровня в системе ФАСЧ может привести к расхождению частот fc и /г, т. е. возникновению дополнительной расстройки. Знак и величина этого расхождения совпадает со знаком начальной расстройки Дсон и будет тем больше, чем больше Дсон. Физически это можно объяснить с помощью фазового портрета системы (рис. 22-50). При действии помех большого уровня и наличии началь- ной расстройки Айн вероятность изменения фазы на 2я (переход системы в новое состояние равновесия У) будет неодинаковой. Если Асон>0, то рабочая точка переходит вправо (в сторону увеличения fr) чаще, чем влево, т. е. среднее значение частоты fr будет больше fc. При Дсон пропесс будет обратным. Количественные характеристики этого явления описаны в [Л. 5] и некоторых других работах. 22-3. СИСТЕМЫ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ Принцип действия Измерение угловых координат целей основано на двух свойствах радиоволн.- постоянстве скорости и прямолинейности распространения. Сигнал цели принимается на разнесенные в пространстве приемные антенны. Угловое положение цели определяется в результате сравнения этих сигналов. По способу сравнения различают два основных метода измерения - амплитудный (сравниваются амплитуды) и фазовый (сравниваются фазы). Измерение угловых координат может осуществляться при помощи систем с обзором пространства и систем автоматического сопровождения. Системы с обзором пространства. Принцип действия таких систем рассмотрим на примере амплитудного метода измерения. Узкий луч совершает обзор заданной части пространства. Угловое положение антенны, при котором от цели поступают импульсы (сигналы), определяет направление на цель. Слежение за этим положением осуществляется автоматически. Поскольку в секторе обзора может оказаться несколько целей, можно определять угловые координаты всех этих целей, для чего необходимо иметь соответствующее число следящих систем. Если угловое перемещение антеииы от исходного положения ОМ до конечного направления ON (рис. 22-52, а) осуществляется равномерно (возврат в исходное положение происходит быстро), то углы Yi, Y2 под которыми находятся цели Ц\, Д2 - по отношению к начальному положению ОМ, пропорциональны временным интервалам t\, t% ... от начала каждого периода перемещения антенны до момента прохождения максимумом диаграммы направлений на соответствующую цель. Так как диаграмма направленности имеет конечную ширину 6о, то иа выходе радиоприемника от каждой цели появляется не один импульс, а группа или пачка импульсов (при работе в непрерывном режиме -V- пакет колебаний конечной длительности). Точность отсчета временных интервалов t.\, tz... и соответственно углов Yi> Y2 - зависит от того, с какой степенью точности можно зарегистрировать середину (центр) пачки импульсов. Обработка пачки для уточнения положения ее середины может производиться различными способами. В некоторых случа- ях такая обработка осуществляется с помощью временных различителен (см. стр. 201). Выходные сигналы различителен; используются для управления элементами систем, с помощью которых осуществляется 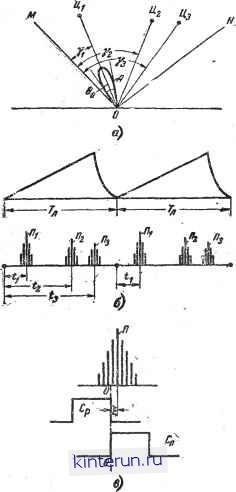 . Рис. 22-52. Система автоматического определения угловых координат с обзором. а - диаграмма для иллюстрации принципа действия; б - временные диаграммы перемещения луча и принятые импульсы; в - пачка импульсов П и селекторные импульсы Ср и Сп; рассогласо вание в системе 6. сопровождение пачки по времени. Система отсчета угловых координат при этом вполне аналогична системе слежения за временным положением отраженных импульсов в автоматических. радиодальномерах (см. § 22-4). Отличие здесь состоит в том, что вместо одного отраженного -импульса следящие импульсы С] и С2 (рис. 22-52, в) перекрывают пачку импульсов, а сигналом рассогласования в этой системе является различие £ временного положения оси сим- метрии ОО следящих импульсов относительно середины ( центра тяжести ) пачки. Иногда в исполнительном устройстве используются не электронные интеграторы, а интегрирующие двигатели. Все основные свойства таких систем аналогичны свойствам соответствующих импульсных автоматических радиодальномеров [Л. 13] Для обработки пачки импульсов и определения временных интервалов гь t2 ... часто используются элементы цифровых машин. Рассмотрим весьма упрощенный вариант такой схемы [Л. 9, стр. 112]. С антенной системой сопряжен датчик углового положения антенны, например магнитный барабан МБ, на котором записаны угловые деления, выраженные количеством импульсов, пропорциональным углу поворота антенны относительно начального положения (рис. 22-53). Начало отсчета фиксируется выдачей нулевого импульса, нанесенного иа магнитном барабане МБ0 (единственная нулевая риска 0). Оба сигнала считы-ваются магнитными головками МГ и МГй Число импульсов между нулевым импульсом и импульсом от цели пропорционально угловому положению цели. Для бо лее точного отсчета угловой координаты в системе осуществляется обработка пачки импульсов, в результате чего образуются два импульса: один из которых соответствует началу, а другой - концу пачки. В этом случае измеренное угловое положение цели (угол уш) находится из равенства уи = 0,5 ( н +Лк), где пн и пк - число импульсов, отсчитанных до начала и конца пачки соответственно. Описанные операции составляют первичную обработку сигналов радиолокационной станции и могут быть выполнены, например, с помощью схемы на рис. 22-53. Нулевой импульс с магнитной головки МГц сбрасывает регистр азимута, и при вращении антенны на регистре фиксируется число импульсов, поступающих с магнитной головки МГ, пропорциональное углу поворота антенны. Сигналы, принятые антенной, проходят предварительный селектор ПС, в котором осуществляется предварительная селекция сигналов по дальности и углу, а затем поступают на блок обработки пачки БОП. В блоке БОП по сигналам приемника оптимальным образом (в известном смысле) определяются границы пачки: т е начало и конец. При поступлении импульса начала пачки происходит через схемы И поразрядное считывание числа пв импульсов иа накап: ливающий регистр, а при поступлении импульса конца пачки происходит считывание числа импульсов пк. После суммирования и деления на два полученное число импульсов поразрядно считывается на схему распределения измерений, откуда поступает далее в ячейки памяти цифровой машины для осуществления последующей обработки. Съем данных с накапливающегося регистра на 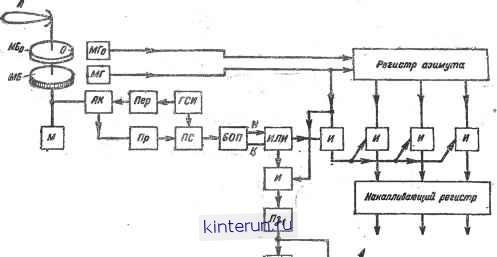 Рис. 22-53. Функциональная схема системы автоматического определения угловых координат с одновременным обзором. А - антенна; М - мотор вращения антенны; МБ, МГ, МБо, МГо - магнитные барабаны н головки; АК - антенный коммутатор; ГСП - генератор синхронизирующих импульсов; ПС - предварительный селектор; БОП - блок обработки пачки (Я - начало, К - конец).
Схема распределены шипи 7г/ Уп Гиз схему распределения происходит в результате поступления импульса считывания, задержанного в линии задержки Л31 на небольшое время; после считывания этот же импульс, задержанный также на лтеболыное время в линии Л32, осуществляет\сброс накапливающего регистра. После этого устройство оказывается подготовленным к фиксации координат следующей цели. Распределение целей осуществляется с помощью коммутатора, который действует от тех же импульсов сброса накапливающего регистра. Число целей, угловые координаты которых можно определить таким способом зависит от объема памяти машин. Системы автоматического сопровождения В системах сопровождения осуществляется обработка радиосигналов (принятых направленной антенной системой), при которой выходное напряжение является функцией взаимного углового положения фронта волны (в месте приема) и поверхности рас-крыва антенны. Угловое положение фронта плоской радиоволны характеризуется перпендикуляром к ней, который направлен на источник излучения Ц (последний считается точечным, а расстояние до источника достаточно большим). Угловое положение раскрыва характеризуется перпендикуляром к раскрыву, проходящему через центр симметрии раскрыва, причем это направление называют равносигнальным РСН (смысл названия уточняется ниже). Прием и обработка радиосигналов осуществляется в п е - ленгационном устройстве ПУ (рис. 22-54). Выходное напряжение кп.у пе-ленгационного устройства является функцией угла между направлением иа источник радиоизлучения (угол у) и равносигнальным направлением (угол уш), т.е. ып.у= =}{в), где в=у-уи, причем при 6=0, п.у=0. Выходное напряжение ып.у пеленгацион-ного устройства (рис. 22-54) воздействует 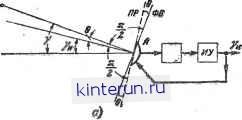 Рис. 22-54. Срстема автоматического сопровожде ния по направлению (АСН). а - общая функциональная схема; А - антенна; ПР - плоскость раскрыва антенны ФВ - фронт волны; РСН - равносигнальное направление; ИУ - исполнительное устройство; остальные элементы - пелен гационное устройство; б - общая ртруктурная схема системы АСН.
|
||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


