
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств иию f и несколько большей величине £/и. Степень смещения от точки А определяется величиной Afc и коэффициентом передачи К=кцКу.цК я, где Ку.ц - коэффициент передачи управляющей цепи - пикового детектора и управляющего каскада (крутизна кривой на участке ab, рис. 22-32, б). Аналогично, протекает процесс 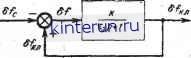 Рис. 22-33. Структурная схема линеаризованной системы АПЧК. и при возрастании fc. Рабочая точка движется вправо (рис. 22-32, а) до тех пор, пока амплитуда импульсов ЧД достигнет величины {Уц.гр, после чего система переходит в режим поиска. Следовательно, существует максимальная частота сигнала f смаке (и соответствующая ему максимальная частота клистрона /кл.манс), превышение которой переводит систему в режим поиска. Ясно, что frp = fc.MaKC - /кл.макс- Рабочая зона клистрона должна быть выбрана так, чтобы частота f кл.макс лежала на линейном участке характеристики клистрона вблизи ее верхнего сгиба. Так как рабочий участок характеристики ЧД расположен левее frp н область f>frp является нерабочей, характеристику ЧД выбирают несимметричной, располагая ее линейный участок ab в основном левее переходной частоты f0. Номинальное значение промежуточной частоты fnP0 приемника (рис. 22-32, с) выбирается меньше, чем fo и frp. Учитывая, что fun - л.макс - - Кк л (Щ - Uу. мин) (22-12) (где (Уу.мин соответствует переходу в ре-. жим поиска) и обозначая 6f - frp - f; 6fс = /смаке - fc, 67кл = кл.макс-fc (22-13) с учетом написанных выше равенств, получаем для установившегося режима при постоянном отклонении частоты сигнала 6 f с~ 8f = Если учтем далее инерционность управляющей цепи, то приходим к структурной схеме статической системы АСЧ (рис. 22-33), записанной для парциальных отклонений (22-13). Для ее анализа применимы все высказанные ранее положения о свойствах таких систем, если только рабочие точки не выходят за пределы линейных участков характеристик. Верхняя граница полосы удержания определяется частотой /смаке, при которой f=frP; нижняя граница, как и в системах АСЧ, определяется касанием кривой UH(f) и прямой АВ, идущей под углом а, причем ctg а=Лу.цЛкл (точка М на рис. 22-34). Уравнение прямой АВ имеет вид: j f-frp-gfc v *\кл у.ц Таким образом, автоподстройка может осуществляться в диапазоне частот сигнала fс.макс--fс.мин, где Минимальному значению частоты сигнала /с.мин соответствует минимальное значение ЧаСТОТЫ КЛИСтрОНа /кл.мпв:=/с.мив-f мин. Зерхняя граница полосы схватывания совпадает с верхней границей полосы удержа- 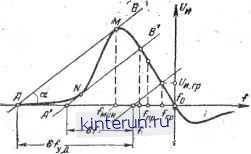 Рнс. 22-34. Диаграмма лля определения полос удержания и схватывания. ния. Нижняя граница определяется той же прямой АВ. Действительно, состояния равновесия между точками А и N уже не будут устойчивыми, поскольку для НИХ {/ < <tVrp. Для любой прямой, лежащей между АВ и <4В, после очередного периода пилы поиска разностная частота будет убывать от значения, большего fo до тех пор, пока не достигнет устойчивой равновесной точки, лежащей левее частоты frp. Таким образом, полосы удержания и схватывания здесь практически совпадают. Система АПЧК с параллельным гене-. ратором поиска. Генератор поиска состоит из автогенератора синусоидальных колебаний АГ и цепи формирования видеоимпульсов ЦФ (рис. 22-35). В качестве промежуточных устройств используется пиковый, детектор (Сд, Рд, участок сетка - катод лампы Л) и инерционный катодный усили- тель (инерционное звено образуется элементами /?ф, Сф и внутренним сопротивлением лампы). Примем, что в системе используется верхняя настройка клистронного гетеродина (/c<fr) и f - fust - -f с- Характеристики ЧД (см. рис. 22-32, а) в этой системе будут такими же, как для предыдущей системы. Характеристики усилителя разностной частоты f учтены в дискриминационной кривой ЧД UB(f). Импульсы с выхода ЧД поступают иа пиковый детектор. При отрицательных расстройках (когда f<fo) его выходное напряжение пропорционально амплитуде импульсов %=Лп.дСи (Ли.д - коэффициент передачи пикового детектора); при положительных расстройках f>fo, ыд 0 (детектирования не происходит). Заметим, что с ростом амплитуды импульсов напряжение 1 на сетке лампы становится более отрицательным. Следовательно, установившееся напряжение щ на> катоде лампы (которое подается как управляющее на клистрон) убывает до тех пор, пока лампа не запрется и на катоде установится постоянное отрицательное напряжение iiy--£а. Система может работать в двух режимах. При поиске импульсы с выхода ЧД не поступают (или имеют достаточно малую амплитуду). Схема, состоящая из АГ, ЦФ и усилителя действует в этом режиме как генератор пилообразных колебаний. В полупериод Г, (рис. 22-36) автогенератор АГ генерирует синусоидальные колебания, которые преобразуются в ЦФ в .видеоимпульсы значительной амплитуды, поступающие через цепь суммирования на пиковый детектор. В результате этого лампа запирается и напряжение % на ее катоде падает по экспоненте с постоянной времени /?фСф до тех пор, пока в результате действия напряжения % (при иу=17у.ср) сорвутся колебания АГ. Импульсы на ПД не поступают, лампа Л отпирается и напряжение на ее катоде возрастает (полупе-рйод Г2). При некотором напряжении % = = Uy.B вновь возникают автоколебания и процесс повторяется. Таким образом, напряжение имеет вид пилообразных колебаний, и частота колебаний клистрона изменяется в достаточно широком диапазоне - имеет место поиск по частоте. Заметим, что обязательным условием возникновения этих колебаний является неравенство порогов срыва и возбуждения АГ:, \Uy.*\ > \Uy.cp\. В режиме слежения установившееся напряжение Uy пропорционально напряжению д, а следовательно, амплитуде импульсов 6/и (рис. 22-37). По мере уменьшения иж напряжение щ увеличивается до тех пор, пока не достигнет величины Uy.B, после чего система перейдет в режим поис- ка. Точке перехода соответствуют напряжение £7и.гр и частота frp, выше которой невозможен режим слежения. Следовательно, как и в предыдущей схеме, режим слежения возможен лишь в области f<frp. Заметим, что рабочим является участок ab зависимости Uy(Un) (рис. 22-37,а). 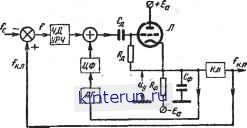 Рис. 22-35. Функциональная схема системы АПЧК с параллельным генератором поиска. 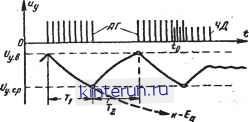 Рис 22-36. Временные диаграммы работы цепей автопоиска. На диаграмму Иу нанесены импульсы автогенератора АГ и частотного дискриминатора ЧД (последние возникают в момент t0 и для наглядности показаны меньшей амплитуды). 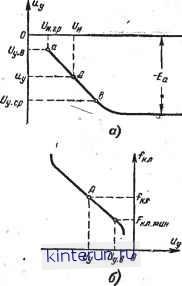 Рис. 22-37 Характеристики отдельных элементов цепи АПЧК с параллельным генератором поиска. а - усилителя; б - клистрона. Переход из режима поиска в режим слежения происходит при появлении импульсов с выхода ЧД; захват осуществляется во время восходящего участка пилообразного напряжения, когда автоколебания АГ сорваны (полупериод Тг, рис. 22-36). Процесс подстройки при изменении частоты сигнала fc относительно исходного состояния А (см. рис. 22-37 и 22-32, с) происходит так. При уменьшении fc разностная частота f=fKn-fc возрастает, £/и
Рис. 22-38. Структурная схема АПЧК с параллельным генератором поиска для парциальных отклонений. падает (рис. 22-32, а), у увеличивается (рис. 22-37, a), fKJ1 уменьшается (рис. 22-37,б). Следовательно, уменьшение fc влечет за собой уменьшение /кл до тех пор, пока не будет достигнута частота frp, после чего система перейдет в поиск. Частоте frp соответствует некото-раи минимальная частота сигнала fcuim и клистрона fKn.MuH, так что frp - f-кл.глшв - fc.MHH- При fс <fc.мин (а следовательно, f>frP) захват невозможен. Рабочая область клистрона должна быть выбрана таким образом, чтобы точка ?кл.мин лежала вблизи нижнего сгиба характеристики fKn( y) (рис. 22-37,6). Для рабочих участков характеристик отдельных элементов можно записать: U* = KK(fo г- f); с/и.гр == Кя(fo - frP); Ну == Uy.b -Ку.ц(£Лгс - и.гр) ; fun = /кл.мин Г* Ккл (у.в - у)* Здесь Кя - \Кч.л\; Ккя = \Ку\, Ку.ц - коэффициент передачи усилителя и пикового детектора. Вводя обозначения: 6fc - fc -f с .мин; bfnn - fun -/к л.мин; 0f=frp-f, а также учитывая написанные равенства, находим: 6f = -- 1 + К Принимая во внимание инерционность усилителя (постоянная времени тэ=/?фСф), получаем структурную схему на рис. 22-38, которая для парциальных отклонении вполне аналогична структурной схеме на рис. 22-33. Все сказанное относительно выбора номинального значения промежуточной частоты, полос удержания и схватывания для схемы на рнс. 22-31 вполне применимо к рассматриваемой схеме. Фазовые системы АСЧ Функциональная схема, основное уравнение системы. Фазовые системы автоматического слежения за частотой (ФАСЧ) нашли широкое применение в разнообразнейших радиотехнических устройствах, где. они известны как системы фазовой ав-топодстройки частоты (ФАП). Внимание, которое уделяется системам ФАСЧ, обусловлено не только особыми динамическими свойствами этой системы, но также и тем, что в некоторых условиях эта система является оптимальной. Заметим, что иногда возникает необходимость осуществить слежение за фазой колебаний. Эта задача решается с помощью систем, тождественных по структуре системам, осуществляющим слежение за частотой, поскольку отклонение частот Дсо и разность фаз ср колебаний связаны между собой известным соотношением Функциональная схема ФАСЧ представлена на рис. 22-39. На фазовый детектор ФД поступают колебания внешнего генератора частоты fc и следящего генера- Рис. 22-39 Функциональная схема фазовой системы автоматического слежения за частотой (ФАСЧ) или фазовой автоподстройки частоты (ФАПЧ). тора частоты fr. После преобразования выходное напряжение проходит промежуточные устройства ПУ и затем поступает на управитель частоты. В отличие от частотной системы АСЧ сравнение частот здесь происходит в фазовом детекторе. Если fc постоянна, то fr может быть постоянным, если напряжение на управителе щ постоянно. Следовательно, выходное напряжение Ф.д детектора ФД также должно оставаться неизменным. Поскольку ыф.д = -Кд coscp, требуется постоянство разности фаз, что может быть только при одинаковых частотах. (Коэффициент Кц имеет размерность напряжения).
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


