
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств дискриминационной кривой Af - Afc/Ka). При дальнейшем возрастании Afc образуются три состояния равновесия, однако система будет оставаться в первом из них (А) до тех пор, пока точки А к В не сольются (при Afc=Af), после чего система перейдет в состояние С, соответствующее неэффективной работе системы АСЧ. В дальнейшем Af будет изменяться приблизительно на ту же величину, что Afc (рис. 22-24,6). При обратном движении (уменьшении Afc) равновесная точка системы (С) скользит по нижней ветви дискриминационной кривой (область .неэффективной работы) до тех пор, пока характеристика управителя не коснется дискриминационной кривой, т. е. точки В и С сольются (соответствующее отклонение частоты сигнала обозначено Afcx), после чего система перейдет в состояние А, соответствующее эффективной работе. При дальнейшем уменьшении Д/с величина Af интенсивно убывает (для линейного участка дискриминационной кривой Af=Afc/Kn)- Таким образом, зависимость Af(AfD) имеет симметричные петли гистерезиса (рис. 22-24, б). Для общей характеристики этой зависимости вводят понятия полосы удержания и схватывания. Полосой удержания 2AfyR называют область начальных отклонений частоты сигнала, соответствующих эффективной работе системы АСЧ, если система вначале находилась в области эффективной работы. Полосой схватывания 2Afcx называют область начальных отклонений чистоты сигната, соответствующих эффектив ной работе системы, если вначале система находилась вне области эффективной работы. Всегда выполняется соотношение 2AfyH>2Afox. Для полигональной аппроксимации дискриминационной кривой (рис. 22-25) полосы схватывания и удержания: 2ufcx == 2ufrp; 2AfyK = =2A/m(l K= КЧ.ЛКУ. В динамических режимах (для статической системы АСЧ с однозвенным фильтром) реакция на ступенчатое воздействие зависит от величины воздействия А/с и начальных условий (начальной расстройки AfH)- Зависимость Af(t) для различных значений Afc при нулевой начальной расстройке AfH=0 имеет вид, представленный на рис. 22 26. При малой величине А/с, когда начальное значение Afc невелико и режим линейный (прямая / на рис. 22-24,а), расстройка спадает по экспоненте (кривая /). Дальнейшее увеличение Afc ведет к появлению участка с кривизной другого знака, время установления затягивается (кривые 2, 3). Наконец, при Afc>Afcx кривая вновь становится близкой к экспоненте, но установившаяся расстройка становится боль- шой, а работа системы - неэффективной (прямая 3 на рис. 22-24, а и кривая 4 на рис. 22-26). Граничному состоянию Afc = =Afcx соответствует бесконечно большое время установления. Различные начальные условия - Afn соответствуют различным начальным напряжениям на конденсаторе фильтра. На рис. 22-27, а изображена зависимость Af(t) для Рис. 22-25. Диаграмма работы системы АСЧ при полигональной аппроксимации дискриминационной кривой. 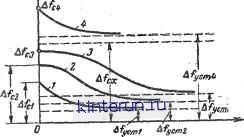 Рис. 22-26. Кривые установления расстройки tf(t) при нулевых начальных условиях для различных значений ufc. случая, когда Afc=Afci на рис. 22-24, а. Различным начальным отклонением Afn соответствуют кривые, имеющие различную форму, причем время установления затягивается по сравнению со случаем экспоненциального процесса, характерного для линейных режимов. На рис. 22-27, б представлены кривые, соответствующие отклонению частоты сигнала Afc=Afcs. Здесь в зависимости от величины AfK возможен переход в область эффективной (кривые /, 2, 3) или неэффективной (кривая 4) работы. Исходное отклонение расстройки на обоих семействах кривых Afncx=AfH+Afc. Заметим, что процесс установления в системе с однозвенным фильтром всегда апериодический [Л. 1, 12]. Ошибки воспроизведения частотных систем АСЧ. Ошибки систем АСЧ зависят от характера внешних воздействии. Управляющее воздействие (изменение Afc) определяется назначением системы, а следовательно, может быть весьма разнообразным. К. мешающим воздействиям относятся: уходы собственной частоты следящего генератора Д/п.г, вызванные изменением внешних условий и нестабильностью питающих напряжений: уходы переходной частоты дискриминатора Д/п.д, обусловленные теми же причинами; . внутренний шум приемника, а также внешний шум, которые в дальнейшем будем полагать малыми и весьма, широкополосными (по сравнению с полосой ПУ). 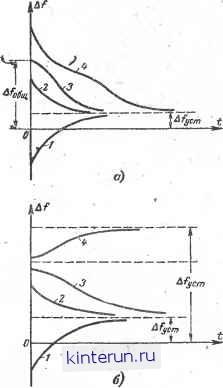 Рис. 22-27. Кривые установления if(<) при различных начальных условиях ufH. а - при малом ufс; б - при ufc, соответствующем наличию, тоех состояний равновесия: кри-вые / соответствуют ufH<0; для кривых 2-4: Структурная схема системы с учетом внешних возмущений представлена на рис. 22-28, где .через W обозначены все элементы системы, за исключением ЧД: W= ~=УУ/Кч.д. Шумовое напряжение um(t) на выходе ЧД получается в результате прохождения его через полосовой усилитель и частотный дискриминатор. Полагая амплитуду сигнала достатчно большой (выше порога ограничения Ua), а напряжение шума малым (большое отношение сигнал/шум), для спектральной плотности шумового на- пряжения Sm(cu) можно записать [Л. 7, стр. 24, Л. 3, стр. 23]: S (со) : <£>2 = Na со2, (22-6) N - спектральная плотность входного шума ПУ; Лп.у - коэффициент передачи ПУ; N0 - спектральная плотность шума на входе ЧД. (характеристика ПУ предполагается равномерной в полосе пропускания). Выражение (22-6) получается в результате учета составляющих биений между несущей сос и составляющими широкополосного шума: чем больше разность частот, тем болыле величина шумовой составляющей на выходе ЧД. При не очень больших отношениях сигнал/шум необходимо также 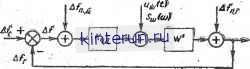 Рис. 22-28. Структурная схема системы частотной АСЧ с учетом внешних воздействий. учесть составлиющие биений между отдельными составляющими шума. Вычисление шума, обусловленного этими причинами, представляет определенные трудности. Полагая для этого случая, что полоса системы достаточно узка по сравнению с полосой шума на входе ЧД, можно учесть лишь спектральную плотность у нуля, которая. выражается [Л. 3, стр. 190, Л. 4, стр. 472]: Sm (0) = 1,86 Ы<1де-0-5 2&1,86 ДЛ-Ч2Д, (22-7) где А - энергетическая (шумовая) полоса УПЧ; q - отношение эффективного значения сигнал/шум. Ошибка воспроизведения в соответствии со структурной схемой на рис. 22-28: Д/вос = ТТ, - ТТ- Д/п.д - 1 + W Д/п.г i + w Л + W l+W Здесь первая составляющая - динамическая ошибка; остальные обусловлены внешними возмущениями. Если Д/П.д и Д/п г - достаточно медленные функции времени, например, обусловленные уходом температуры, то в установившемся режиме эти составляющие выражаются так: А/вос-д - А/п.д: К+1 А/п.д при К > 1; Д/вос-г-- А/п-г 1+К Отсюда следует, что уход частоты гетеродина хорошо парируется системой: вызванное им отклонение разностной частоты будет уменьшено в Кп раз. Уходы переходной частоты дискриминатора не компенсируются системой и почти полностью переходят на расстройку. В случае, если Afn. обусловлены бы-строизменяющимися нестабильностями источников питания или другими причинами, дисперсия ошибки, обусловленная этими причинами, х фе (7Ш)3А°.. (22-8) где Sn.r(co)-спектральная плотность уходов частоты гетеродина, Ф$=1-Ф - передаточная функция для ошибки. Дисперсия о2вос.г . будет тем меньше, чем шире полоса системы AFa. Перейдем к рассмотрению ошибок, обусловленных шумами. Наиболее просто дисперсия ошибки вычисляется, если предположить, что спектральная плотность ит выражается формулой (22-7), т. е. постоянна и равна Sm(0). Тогда вос.ш = £ f Sm (°) I* 0Ш)12 -Г d< = -со ч.д =1,86Де-0-5,?2ДЕэ. (22-9) Подчеркнем, что из-за грубых приближений, обусловленных тем, что не учтено непостоянство /Сч.д Для сравнительно малых отношений сигнал/помеха, пользоваться этой формулой нужно с большой осмотрительностью. - Вычисление дисперсии ошибки по формуле, аналогичной (22-9), где Sm выражается формулой (22-6), может привести к противоречию в случае некоторых типов фильтров, так как спектральная плотность растет так же быстро, как падает частотная характеристика системы Ф(/со)2 и интеграл (22-9) расходится. В этом случае необходимо учесть, что спектр частотных шумов на входе (и выходе) ЧД простирается лишь на величину полосы Д пропускания полосового усилителя, за пределами которой Sm(co) =0. Поэтому интегрирование при вычислении дисперсии должно проводиться не в бесконечных пределах, а в пределах =ЬлД. С учетом этого вычислим дисперсию шумовой ошибки в системе АСЧ с однозвенным фильтром, когда F(p>==+T: ф(р) = Л- + 1 тр + Г Т В этом случае Ф(/о)г N0 К2 11 ~U20 (1+Юа <д2л. яд со2 rfto К2 N0 X 1 -=----Д. (22-10) 1 со2т2 + 1 Г2 f/2 -яД и Если интеграл при вычислении дисперсии не расходится [например, для двухзвен-ног,о фильтра F (р)], то вычисления можно вести, интегрируя, в бесконечных пределах, поскольку ограничение по спектру областью ±яА существенных поправок в результат не внесет. Отметим некоторые особенности, свя-заные с динамической ошибкой при использовании систем АСЧ в приемниках с частотной модуляцией. Если в приемнике ЧМ сигналов применяется система автоподстройки частоты гетеродина, то параметры этой системы должны быть выбраны так, чтобы составляющие частот модуляции на выходе частотного детектора не проходили на управитель частоты. В противном случае будет происходить демодуляция ЧМ сигнала и уменьшение выходного сигнала. Наиболее опасной будет демодуляция самых низкочастотных составляющих спектра) модулирующего сигнала. Если потребовать, чтобы для этой составляющей Qmhh амплитуда отклонения частоты гетеродина была .в m раз меньше амплитуды отклонения несущей частоты Afc, обусловленной ЧМ модуляцией, то частотная характеристика для этой частоты должна иметь величину, не превосходящую I/m, т. е. А7с=\ф а)\ Для системы с однозвенным фильтром это приводит к выражению откуда находится минимально допустимая постоянная времени фильтра мин - (K + l)Vm? - 1 mK
|
|||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


