
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств При ступенчатом отклонении частоты сигнала Д/со (рис. 22-22) i=nbfA-(1-r4)i 4 ( -* *) 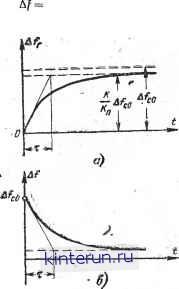 Рис. 22-22. Процессы установления в системе с однозвенным фильтром при ступенчатом отклонении - частоты сигнала Afc0. а - для отклонения частоты генератора; б -1для расстройки. < Время установления процессов в системе до 90% от установившегося значения (стр. 20) 2,ЪТ уст 2,5т: Быстродействие системы тем выше, чем больше коэффициент передачи. При значительном увеличении К проведенное рассмотрение, становится несправедливым, поскольку начинают влиять неучтенные малые параметры - инерционность различных усилительных элементов и запаздывание сигналов ПУ. Статистическая система с двухячеечным (двухзвенным) RC-фильтром. В такой системе передаточная функция промежуточных фильтрующих устройств п.у (р)= 7W1+ (71+7-2 + 7+1 К этому случаю сводится система, содержащая двухзвенный #С-фильтр нижних частот с постоянными времени Ti=RCl и T2=RC2 (Tc=RiC2), нли система с однозвенным фильтром при учете, инерционных свойств ЧД. Передаточная функпия разомкнутой системы Д/г К W (р) = =-- Д/ 7172р2+(71+72+7с) р+1 и замкнутой системы Д/г Кэ ф(р) = Здесь Д/с т2рЧ-2£тр+Г - \ГTlT* - С- Tl В установившемся режиме при постоянном отклонении частоты сигнала свойства системы ничем не отличаются от свойств системы с однозвенным фильтром, т. е. и здесь имеется остаточная расстройка Л/со В динамическом отношении система эквивалентна динамическому звену второго порядка с параметрами Ка, т и £. Добиться благоприятного режима установления (£= яй0,7-н1) при значительной величине коэффициента К можно только в случае резко различных постоянных времени фильтра Ti<giTz или Гг-сТ-!. Так, при К=40 постоянные времени должны раеличаться не менее чем в 10 раз. Время установления в системе при £ <С <С Г (сильно колебательный процесс) зависит в основном от соотношения постоянных времени, а величина К на ryGT влияет очень мало.. При резкой разнице в величинах Т, и Г2 и не очень большой величине время установления можно считать (для £>1) близким к величине ЗТ/Кш (Т - наибольшая из постоянных времени). Таким образом, требования хорошего подстраивающе- , го действия (большое К) и благоприятного процесса установления противоречивы для систем с двуезвенным фильтром, и использование системы с двухзвенным фильтром - во многих случаях оказывается нецелесообразным. Дальнейшее увеличение числа звеньев в фильтре усложняет условия, при которых достигается благоприятный режим установления, и ведет к необходимости применения корректирующих цепей. Системы с трехзвен-ными и более сложными типами фильтров используются в редких случаях. Запаздывание в системах АСЧ. Запаздывание возникает в полосовом усилителе и приводит при больших К к возникновению значительной колебательности процессов установления или даже потере устойчивости. Запаздывание может быть учтено введением дополнительного звена с передаточной функцией е-з-в структурную схему (рис. 22-21,6). Время запаздывания т3 зависит от числа контуров полосового усилителя и его схемы. Для усилителя, состоящего из п одиночных, не связанных между собою резонансных контуров где В - полоса пропускания каждого контура на уровне 1/2 . Наиболее наглядно влияние запаздывания можно показать на примере системе с однозвенным фильтром. Если время запаздывания достигает граничной величины Т Тз.гр= =0,37 Т/К, то переходная харак-t\e , теристика из апериодической становится колебательной. При критическом значении п Т Тз=Тз.кр=~г-77~,2 Тз.гр система теряет 2 а устойчивость. Из приведенных соотношений следует, что влияние запаздывания тем сильнее, чем больше коэффициент передачи и меньше постоянная времени фильтра. Таким образом, запаздыванием можно пренебречь, если К не очень велико, а Т не очень мало. Физически это означает, что фазовый сдвиг т3сос, обусловленный запаздыванием на частоте среза [частоте сос, при которой \Ф(/, со) = 1], невелик. В системе с-однозвенным фильтром ч>с=К/Т и запаздывание не сказывается, если т3- -С я. Астатическая система с инерционным двигателем. В этом случае передаточная функция разомкнутой системы равна: . W(P) Р(Тч.ДР + 1)(ТуР+1) Здесь для общности вместе с инерционностью управителя (постоянная времени Ту) учтена инерционность дискриминатора Тчд. В установившемся режиме при постоянном отклонении частоты сигнала система отрабатывает без ошибок: A/Vct=A/co. Если, конечно, двигатель обладает застоем (см. разд. 21, стр. 124), то и при постоянном Afc=A/:co в системе возникает ошибка Д/о = Изаст/Ао, где Кзаст - напряжение застоя (т. е. напряжение, при котором двигатель трогается), Ко - коэффициент передачи элементов, предшествующих двигателю При уходе частоты сигнала с постоянной скоростью в системе в установившемся режиме устанавливается постоянная расстройка уст A fc Условие устойчивости системы имеет вид (см. стр. 49) : К0<~ + Г- Если в системе постоянная времени частотного дискриминатора мала по сравнению с Ту, система остается устойчивой при любом значении /Со. Условие малости имеет вид: T4.h<0,02VTyIKv При его выполнении можно считать, что передаточная функция разомкнутой системы W(p) р{Ту р+1) и замкнутая система, эквивалентная звену . 2-го порядка, Ф(р) (22-5) 2VTyKv Процесс установления будет удовлетворительным, если £ 0,5-f-7, т. е. Га%>~ -0,5-=-0,25. В случае невыполнения этого условия в систему необходимо ввести дополнительные корректирующие фильтры. Нелинейные режимы систем АСЧ. Благодаря нелинейности характеристик элементов системы АСЧ возникают новые явления. Рассмотрим эти явления применительно к статическим системам АСЧ. Обычно соотношения между характеристиками элементов таковы, что интервал между максимумами характеристики ЧД больше полосы пропускания полосового усилителя и меньше протяженности линейного участка характеристики управителя (рис. 22-23). Поэтому в системе необходимо учесть нелинейность, полученную в результате перемножения характеристик полосового усилителя -й дискриминатора; полученную кривую (3) будем считать характеристикой дискриминационной части системы (или дискриминационной характеристикой). Заметим, что, строго говоря, такое перемножение можно осуществлять независимо от амплитуды с7твх сигнала на входе смесителя только за порогом ограничения Ua. До порога ограничения Uo напряжение на выходе ЧД зависит не только от расстройки Af, но и от амплитуды сУтвх. Однако, если принять, что полосовой фильтр имеет достаточно прямоугольную характеристику, с этой зави- симостью можно не считаться, поскольку за - ее пределами выходное напряжение на выходе ЧД будет близко к нулю независимо от сигнала на входе. В пределах линейного участка аЬ крутизна дискриминационной характеристики совпадает с крут/изной Кч.д характеристики частотного дискриминатора, поскольку за порогом U0 вид ич.п (/) не зависит от величины UmB. 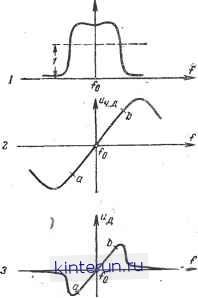 Рис. 22-23. Характеристики элементов системы АСЧ. / - полосового усилителя; 2 - частотного дискриминатора; 3 - дискриминационная характеристика; 4 - управителя. три состояния равновесия, из которых одно (В) неустойчиво, а два других (Л и С) устойчивы. Эффективной работе системы соответствует только одно состояние Л, поскольку в состоянии С Д/ = Д/С и Д/г весьма сильно отличается от Д/с, в то время как для точек Л Д/ мало и величина Д/г близка к Д/с 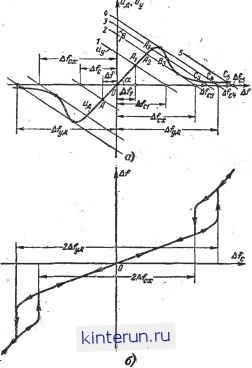 Рис. 22-24. Диаграммы работы системы АСЧ для установившихся режимов. а - для определения состояний равновесия; б-зависимость Д/ от В установившихся режимах, т. е. при очень медленном (по сравнению с временем установления) изменении Д/с, фильтр не будет оказывать никакого влияния на процессы в системе и его можно считать отсутствующим. Для анализа состояний равновесия статической системы АСЧ на дискриминационную кривую д(Д/) наносится характеристика управителя (прямая иу на рис. 22-24, а)-: А/с-А/ Точки пересечения обеих линий соответствуют состояниям равновесия, поскольку для этих точек uy - uR. В зависимости от величины начального отклонения частоты сигнала Д/с могут быть либо одно, либо Для того чтобы пояснить, устойчиво лн данное состояние равновесия, достаточно провести следующие рассуждения. -Так, например, для точки С3 при увеличении /Af, вызванном случайной причиной, напряжение ч.д на входе ДС-фильтра оказывается более высоким, чем прежнее напряжение иу на конденсаторе (выходе) фильтра, соответствующее состоянию равновесия. Следовательно, щ будет возрастать, Д/г увеличиваться, а Д/ (при неизменном значении Тс) падать - система будет возвращаться к состоянию равновесия С3. Аналогичные рассуждения можно провести и для других точек (Л к В). При постепенном увеличении Д/с (начиная с малых Д/с, например Д/с = Д/С1) расстройка Д/, определяемая единственным состоянием равновесия Л(Л{), постепенно увеличивается. (На линейном участке
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


