
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ряда конденсаторов Ct и С2 через диоды Да и д4 меньше длительности импульсов. При поступлении очередного импульса в точку 7 конденсаторы С± и С быстро заряжаются так, что возрастает потенциал верхней обкладки конденсатора С, причем приращение напряжения на конденсаторе С много меньше, чем на Ci. В интервалах между импульсами конденсатор С1 разряжается через диод Д5, так что к приходу очередного импульса напряжение на нем 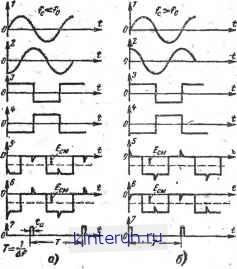 Рис. 22-17. Временные диаграммы, иллюстрирующие действие ДНЕ. а -для fc<f0; б -для fc>f0-Порядок величин: R-SO ком; С =50 пф; R- =0,5 Мом, С-1--2 мкф, С,=30 -н50 пф. успевает установиться до исходного значения. Конденсатор С в интервалах между импульсами медленно разряжается на резистор R. При поступлении импульсов на вход 8 конденсатор С2 быстро заряжается через диод Де. После прекращения импульсов происходит разряд конденсатора С2 через резистор R, конденсатор С и диод Д4. Разряд заканчивается к моменту поступления следующего импульса. При этом конденсатору С отдается избыточный заряд так, что повышается потенциал нижней обкладки. Одновременно происходит медленный разряд конденсатора С на резистор R. Выходное напряжение ДНБ описывается выражением CiRM где U - напряжение запирания диодов Дь и Де, Д/ = / с - fo- Эта формула справедлива при Уя > S> U и не очень высокой частоте повторения импульсов Af. Для того чтобы дискриминатор действовал более эффективно, на входе усредняющей схемы устанавливают усилители импульсов. (Это учтено при изображении временных диаграмм на рис. 22-17). При очень малой величине Af (когда fc~fo) в выходном сигнале наблюдаются пульсации; при очень больших значениях Д/с напряжение ич.я падает из-за уменьшения амплитуды импульсов. ДНБ обладает инерционностью, обусловленной наличием сглаживающего /?С-фильтра счетной цепи. Структурная схема ДНБ для линейного участка характеристики имеет вид инерционного звена (рис. 22-12,6) с постоянной времени T4.n-RC. Устройство управления частотой (управители частоты). С их помощью осуществляется изменение частоты колебаний автогенератора в соответствии с поступающим напряжением. В системах радиоавтоматики управитель частоты представляется динамическим звеном, на вход которого подается управляющее напряжение у, а с выхода снимается напряжение частоты генератора fr. Различают пропорциональные и интегрирующие управители. В пропорциональном управителе величины fr и % связаны линейной зависимостью fr = frO + K-gUy, где /Су=Д/г/ у- коэффициент передачи управителя, гц/в; Afr=/r-/го - отклонение частоты гетеродина от номинального значения fro, соответствующего нулевому управляющему напряжению. В реальных управителях не представляет большого труда получить на характе-  Рнс. 22-18. Характеристика пропорционального управителя частоты. ристике fr=ty(%) линейный участок ab (рис. 22-18) значительной протяженности, намного превосходящий линейный участок характеристики у частотных дискриминаторов. Как правило, инерционность реальных схем управителей очень мала и их можно описать пропорциональным динамическим звеном (рис. 22-19, а). Практические схемы пропорциональных управителей не отличаются от схем простых частотных модуляторов (см. т. 2, стр. 49) в виде реактивных ламп, варикапов или управляемых емкостей р-п переходов полупроводниковых диодов и транзисторов. Из-за дрейфа нуля усилителей, предшествующих управителю, а также из-за. измене-
Рис. 22-19. Структурные схемы управителей частоты. а - пропорционального; б - интегрирующего; е - видоизмененная схема интегрирующего управителя с выделенным звеном Ку, гц/е. ния параметров управителя возникает дополнительное (паразитное) изменение частоты генератора Afu.r, которое должно быть скомпенсировано системой АСЧ. Интегрирующие управители содержат в своем составе интегратор, так что частота генератора у +/о {D - символ дифференцирования). им - \ к к Рис. 22-20. Функциональная схема интегрирующего управителя с двигателем. ИД - исполнительный двигатель; РЕД - редуктор; ПК - прямочастотный конденсатор; КК. - колебательный контур. Величина fo задается начальными условиями интегратора. В практических схемах интегрирующих управителей используются электронные интеграторы с пропорциональным управляющим элементом или исполнительный двигатель с редуктором и прямо- частотным конденсатором (рис. 22-20). Частота генератора в последнем случае: fr= WY(p)uy + f0; Р{ТуР+1) Р(ТуР + 1) р(7> + 1) у Здесь К дв Ту - коэффициент передачи и постоянная времени двигателя; Кред - коэффициент передачи ре-* дуктора; К - коэффициент пересчета угла поворота конденсатора в изменения частоты; Кя.у - общий коэффициент передачи с размерностью, гц!в сек; Кк - коэффициент передачи интегрирующей части управителя, 1/сек; Ку - коэффициент передачи пропорциональной части управителя, ец/в. Структурная схема такого управителя представлена на рис. 22-19,6. Заметим, что выделение звена с коэффициентом передачи Ку (рис. 22-19,в) представляет определенные удобства при составлении и анализе структурных схем систем АСЧ. Интегрирующие управители с двигателем используются часто в системах, где не требуется высокого быстродействия, например в системах АСЧ радиорелейных линий, поскольку здесь основное значение имеет медленный уход частоты гетеродинов приемников. Частотные системы АСЧ непрерывного действия Структурные схемы системы АСЧ (линейный режим). Примем, что функциональная схема соответствует приведенной на рис. 22-3 с учетом того, что режим работы отдельных элементов системы остается линейным и частотные отклонения не выходят за пределы линейных участков характеристик частотного дискриминатора и управителя. Выходное напряжение частотного дис- . криминатора ч.д = KKUm(f - fo) = /Сч.д(/- fo), где Um - напряжение на входе ЧД, полученное в результате усиления входного сигнала смесителя ыВх = С/твх sin (швхг+ +ср) в полосовом усилителе (ПУ). Инерционность ЧД удобно отнести к промежуточным устройствам, включив соответствующую передаточную функцию инерционного звена в передаточную функцию промежуточных устройств. Если не принято г икаких специальных мер, коэффициент передачи ЧД Кч.д KjjVm = КцКсмКп.уЬГт вх (Кем; Кл.у - коэффициенты передачи смесителя и полосового усилителя) зависит от неконтролируемой величины t7mBx. Следо-< вательно, и коэффициент передачи ЧД и общий коэффициент передачи системы является величиной неконтролируемой, что, естественно, недопустимо, поскольку невозможно добиться определенных динамических свойств системы. Поэтому необходимо либо 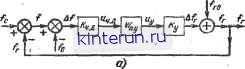 Рис. 22-21. Структурные схемы линейных систем АСЧ. а - полная; б - для отклонения частот. установить эффективную систему автоматической регулировки усиления, стабилизи-, рующую амплитуду входного напряжения ЧД, либо установить перед ЧД ограничитель. В том и другом случае величина Кч.п становится почти постоянной, что и будет предполагаться в дальнейшем. Заметим, что функциональная, а следовательно, и полученная в дальнейшем структурная схема тождественны схемам частотной автоподстройки частоты гетеродина (АПЧ). Обозначив через W .v(p) передаточную функцию промежуточных устройств и отнеся к ним интегрирующее и фильтрующие инерционные звенья и пренебрегая инерционностью полосового усилителя, придем к общей структурной схеме на рис. 22-21, а. Здесь /Су - коэффициент передачи пропорционального управителя или пропорциональной части интегрирующего управителя. Введем в рассмотрение отклонение частоты сигнала Д/с=/с-/со, где /со удобно назвать номинальным значением частоты сигнала. Эту частоту выберем так, чтобы соблюдалось равенство /со-/го=/о, где fo - переходная частота дискриминатора, равная среднему значению частоты полосового усилителя. Заметим, что /го- частота следящего генератора при у=0 для пропорционального и (при нулевых начальных условиях) для интегрирующего управителя. Тогда расстройка ., %f=,f-fD=fc-fT- (f CB-fT0) = = д/с - д/г: При написании этого выражения предполагалось, что частота /=/с-/г. Такое предположение сделано исключительно ра- ди удобства; те же рассуждения с одинаковым успехом можно провести для случая, когда /=/г±/с (и, конечно /о=/го±/со). С учетом выражения для Af структурная схема системы упрощается (рис. 22-21, б). При составлении структурных схем не учитывалось, что в результате прохождения сигнала через полосовой усилитель происходит запаздывание во времени; в некоторых случаях это запаздывание может оказывать существенное влияние на процессы в системе (см. ниже). < Анализ динамических режимов удобно провести раздельно для статических и астатических систем АСЧ. Статическая система с однозвенным фильтром. В такой системе №п.у= ---~ К ней сводится система, в которой промежуточные устройства содержат фильтр с постоянной времени Т, значительно превосходящей постоянную времени частотного дискриминатора Тч.д, так что последнюю Можно не учитывать. Требование малости 7ч.д по сравнению с Т можно считать выполненным, если Гч.д/Г-с0,1 К, где К~ =Кч.вКу. К такой же структуре сводится схема без фильтра-(Wn.y=l); в этом случае Т - постоянная времени ЧД. Передаточная функция разомкнутой системы Ц7(р) = А/г- Af Тр+1 Общий коэффициент передачи систем К=Кч.цКу. Замкнутая система описывается инерционным звеном А/г W К А/с 1 + W Тр + К + 1 тр + 1 с эквивалентными коэффициентом передачи Ка и постоянной времени т: 1+К 1+К Величина Кп-К+1 называется коэффициентом автоподстроики частоты. Статическая система АСЧ имеет остаточную расстройку Д/уст установившегося режима, в Кп раз меньшую отклонения частоты сигнала (прн постоянном отклонении частоты сигнала Д/со): Д/уст = Фе(0)/со = 1 + К ,со Кп - передаточная функция по ошибке при р->-0 (см. стр. 43 и 53).
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


