
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств
РАЗДЕЛ 22 АВТОМАТИКА РАДИОУСТРОЙСТВ СОДЕРЖАНИЕ 22-1. Особенности следящих систем радиоавто матики ..............143 22-2. Системы автоматического слежения за частотой колебаний.........146 Принцип действия, функциональные схемы (146). Элементы систем АСЧ (147). Чзстотные системы АСЧ непрерывного действия (156). Импульсные частотные системы АСЧ (164). Фазовые системы АСЧ (169) 22-3. Системы автоматического определения угловых координат........ 176 Принцип действия (176). Общие характеристики пеленгационных устройств систем АСН (179). Пеленгациоиные устройства (181). Исполнительные устройства систем АСН (190). Устойчивость, установившиеся режимы, переходная характеристика системы АСН. Балансировка и фазировка системы (192). Ошибки воспроизведения систем АСН (194) 22-4. Системы автоматического сопровождения по дальности ...........200 Принцип действия (200). Элементы систем АСД (200). Структурные схемы линейных систем АСД. Анализ дискретных линейных режимов (206). Нелинейный дискретный режим (209). Система АСД как система непрерывного регулирования (213). Ошибки воспроизведения систем АСД (217) 22-5. Комплекснрование систем радиоавтоматики ...............222 Принцип комплексироваиия (222). Ошибки воспроизведения в комплексных системах (223). 22-6. Системы автоматической регулировки усиления .............227 Принцип действия систем АРУ (227). Статические характеристики системы АРУ (229). Динамические режимы систем АРУ (234) Литература...... . 237 22-1. ОСОБЕННОСТИ СЛЕДЯЩИХ СИСТЕМ РАДИОАВТОМАТИКИ Среди разнообразных систем автоматического регулирования, применяемых в радиоэлектронных устройствах, можно выделить класс систем, действие которых связано с использованием радиосигналов, - системы радиоавтоматики. К ним относятся: системы автоматического слежения за частотой и фазой синусоидальных колебаний, в частности системы автоподстройки частоты: системы автоматического определения направления на источник радиоизлучения или отражающий объект (автоматические радиопеленгаторы); системы автоматического слежения за временным положением импульсных сигналов или автоматического слежения по дальности. С помощью таких систем решаются разнообразные технические задачи, в частности определяются координаты целей, скорости движения объектов, осуществляется определение высоты полета самолетов, изме- рение магнитного поля Земли, создание эталонов частоты и времени и т. д. В этом разделе рассматриваются принципы построения и динамические особенности перечисленных выше следящих систем. Общим для всех этих систем является использование радиосигналов, которые обычно предварительно усиливаются в радиоприемном устройстве, всегда имеющем систему автоматической регулировки усиления. К системе автоматической регулировки усиления приемника, являющегося элементом следящей системы радиоавтоматики, предъявляются специфические требования в отношении динамических характеристик. Это приводит к необходимости уделить внимание вопросам динамики систем регулирования усиления. В общем виде функциональную схему радиотехнической следящей системы можно представить в виде замкнутой петли (рис. 22-1). В ее состав входят: измерительное или дискриминационное устройство (ИУ), промежуточные усилительные и преобразовательные элементы - промежуточные устройства (ПУ) и объект регулирования (ОР).
Рис. 22-1. Общая функциональная схема системы-радиоавтоматнки. Входным элементом системы радиоавтоматики является радиоприемник или усилитель радиочастоты, куда поступают радиосигналы, принятые антенной системой. Слежение обычно должно осуществляться за каким-либо параметром высокочастотного колебания, который является управляющим воздействием у (г) системы автоматического управления. Так, например, при слежении за частотой колебания на вход радиоприемника (или смесителя) поступает высокочастотный сигнал Ei=fmBisin(cocN-<p), где частота о>с является параметром, а сам сигнал - нелинейной функцией частоты. Аналогично при сопровождении цели по направлению управляющее воздействие - угловое смещение целей у (г)-является параметром высокочастотных колебаний, принятых антенной системой. Таким образом, управляющее воздействие и радиосигнал, поступающий на систему, имеют различную физическую природу. Вследствие этого радиотехнические следящие системы имеют важные особенности. Преобразование входного радиосигнала в сигнал, пропорциональный разности между управляющим воздействием у (t) и его измеренным значением #и(г), осуществляется в измерительном устройстве. Следовательно в отличие от обычной следящей системы в ИУ радиотехнической системы осуществляется не простое сравнение двух величин у и f/и, а происходят достаточно сложные преобразования входного высокочастотного радиосигнала и сигнала обратной связи yB(t) в выходное напряжение ИУ ия, зависящее от рассогласования z(t)=y(t)- -{/и (t), причем для малых рассогласований ид пропорционально z. В отношении отработки рассогласования радиотехническая следящая система функционирует как любая следящая система (см. разд. 21). Напряжение ия после усиления и преобразования в ПУ воздействует на объект регулирования так, что выходная (регулируемая) величина уж (или измеренное значение управляющего воздействия), поступающая по цепи обратной связи в измерительное устройство для нормально функционирующей системы, мало отличается от y(t). Таким образом, наиболее существенные специфические особенности радиотехнических следящих систем связаны с работой измерительного устройства. Выходное напряжение ИУ является нелинейной функцией рассогласования z, которая зависит также и от интенсивности высокочастотных входных колебаний с/тЕХ: и.у = <p(z, Утвх), причем при г=0 <p(0,Vj[/, bx) =0. Эта зависимость называется дискриминационной характеристикой и имеет вид кривой, приведенной на рис. 22-2. При малых рассогласованиях z в системе эта зависимость близка к линейной, так что ил - Kn(Um вх)г, / duK.y \ где величина дд= ---I - кру- \ dz /2=0 тизна дискриминационной характеристики - называется коэффициентом передачи измерительного устройства. В общем случае этот важный параметр зависит от амплитуды сигнала на входе радиоприемного устройства. Амплитуда, в свою очередь, зависит от многих факторов: мощности излучения, дальности до точки 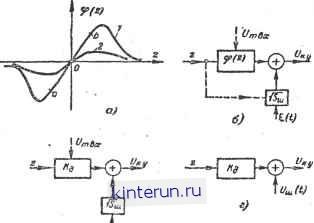 Рис. 22-2. Дискриминационные характеристики и эквивалентные схемы измерительных устройств систем радиоавтоматики. а - характеристики для разного уровня шума на входе (для кривой / уровень шума ниже, чем для кривой 2): б - нелинейный элемент ИУ общего типа; билинейный параметрический эквивалент; г - упрощенный линейный эквивалент. б) HW приема случайных перемещений источников радиоволн, радиопомех и т. п. В общем случае Кд является величиной случайной и поэтому неконтролируемой.. Поскольку коэффициент Кц входит как сомножитель в общий коэффициент передачи системы, необходимо исключить или сильно ослабить зависимость Кк от 1/твх, что достигается использованием системы автоматической регулировки усиления или (там, где это допустимо) ограничителей. Вопросы .стабилизации величины Кц рассматриваются при изучении ИУ различных систем радиоавтоматики. На радиотехническую следящую систему воздействуют внешние возмущения. Некоторые из них обусловлены изменением внешних условий, в которых работает система. Помимо того, на вход радиоприемного устройства системы вместе с радиосигналом поступают радиопоме-х и, так что сигнал на входе приемника является аддитивной смесью высокочастотного колебания, содержащего управляющее воздействие и помехи. В результате преобразования в ИУ выходное напряжение будет зависеть не только от рассогласования z, но и от входного шумового напряжения ш.вх. При рассмотрении ИУ как элемента следящей системы возникает вопрос о его представлении с учетом действия шума, т. е. об эквиваленте ИУ, наиболее полно учитывающем преобразовательные свойства этого устройства. В общем случае оно описывается нелинейной функцией рассогласования z, напряжения на входе t/mBx и входных шумов Ыш.вх: ыи.у = ф(г, {7твх, Ыш.вх). В этом случае дискриминационной характеристикой называют среднее по ансамблю реализаций значение суммарного входного сигнала ф, рассматриваемое как функция фиксированного рассогласования z: ил = <ии.у>=<ф(г)>=ф(г). Косые скобки означают усреднение по ансамблю. При иш-0 это определение дискриминационной характеристики совпадает с данным выше для случая отсутствия шумов на входе. Уточним понятие коэффициента передачи для случая действия шума на входе и рассмотрим вопрос об эквиваленте измерительного устройства. Выходное напряжение ИУ можно записать в виде Ки.у ~г* ш, где ит - шумовая (флуктуапионная) составляющая с нулевым средним значением. В окрестности точки z=0 дискриминационная характеристика при наличии шума обладает центральной симметрией. Для малых рассогласований z среднее значение выходного напряжения . ИУ пропорционально 25 Ид = KpZ,  - величина, называемая коэффициентом передачи ИУ или крутизной дискриминационной характеристики. Величина Кц, характеризующая преобразовательные свойства ИУ при действии шума, зависит не только от интенсивности входного сигнала, но и от уровня входного шума. С ростом шума иш.вх Кд уменьшается, стремясь к нулю. Одновременно убывает величина экстремумов характеристики (см.. рис. 22-2, кривая 2). Флуктуационная составляющая в системах радиоавтоматики, как правило, является широкополосной (по сравнению с полосой последующих элементов системы) и приближенно может быть представлена 6-коррели-рованным (белым) шумом со спектральной плотностью Sm. Следовательно, приближенно выходной сигнал можно записать как и.у = ф(г)*+УГ5ш(0, где £ (t) - белый шум с единичной спектральной плотностью. Преобразование, описываемое этой формулой, можно отобразить эквивалентной схемой на рис. 22-2, б, которая представля ет собой .эквивалент ИУ системы радиоавтоматики. [Зависимость Ф (или Кл) от t/mBx показана пунктирной стрелкой.] Величина Sm зависит не только от интенсивности помехи ыш.вх, но и от величины рассогласования z (является четной функцией z). Чем выше уровень помех, тем, как это следует из детального анализа процессов в различных ИУ, эта зависимость выражена менее ярко. При небольших рассогласованиях z и малом уровне шума на входе эквивалент ИУ можно упростить, полагая, что ф(г) является линейной функцией z, т. е. считать, что u .y = KAz + VsZl(t), причем для каждого данного уровня входного сигнала Кп является величиной, не зависящей от z. Ясно, что это справедливо только для малых рассогласований z. Действие входного шума сводится к добавлению на выход пропорционального звена шума со спектральной плотностью Sm (рис. 22-2, в), причем эту величину можно принять постоянной, не зависящей от со, т. е. полагать £>ш (со) =Sm (0). Последнее равенство основано на том, что процессы в ИУ протекают намного быстрее, чем процесс регулирования в замкнутой системе. Такой эквивалент с учетом изменения величины Кя при изменении уровня шумов можно на-
|
||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


