
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Он, естественно, не будет совпадать с y(t). Однако коэффициенты Ко и Ki можно выбрать так, чтобы выходные сигналы y(t) и u(t) были эквивалентны в статистическом, смысле. Одно из условий такой эквивалентности состоит в равенстве математических ожиданий сигналов y(t) н и (г): ~y(t) = u(t), (21-165) а также дисперсий o2y(t) = al(t). (21-166) Другим условием эквивалентности может служить такой выбор коэффициентов Ко и Ki, при котором обеспечивается минимальное значение среднего квадрата разности действительного и приближенного значения выходной величины, т. е. [У (О - и (01 = min- (21-167) Каждое из указанных условий эквивалентности позволяет определить коэффициенты Ко и Ki- Если принято первое из рассмотренных условий, то в силу равенства (21-164) математическое ожидание и дисперсия сигнала u(t) будут равны: (0 = тц = л-0/иг; o (0=*fof. Тогда из равенства (21-165) получаем: Шу = tnv - Kdmz, а из (21-166) находим: Индекс вверху коэффициента К\ указывает на то, что линеаризация осуществляется по первому способу, т. е. на основании равенства (21-165). Таким образом, коэффициенты Ко и К[ выражаются равенствами: К=-; /С<1) = ±-. (21-168) 0 тг ог Выбор знака перед Ki определяется характером функции cp(z): если ф(г) возрастает около точки z=mz, то К\>0, если убывает, to/Ci-<0. При линеаризации по второму способу [согласно соотношению (21-167)] коэффициент Ко выражается так же, как и по первому, а коэффициент Кх=К[2 определяется через дисперсию входного сигнала и математическое ожидание произведения zy° следующим образом: Кх = К[2) = m(iB.) . (21-169) Для определения этих коэффициентов нужно знать закон распределения входной величины (плотность распределения вероятностей) р(г). Известно, что математическое ожидание и дисперсия нелинейного безынерционного преобразования F(z) случайной функции времени выражается через плот- ность вероятности с помощью следующих соотношений (см., например, т. 1, стр. 77): Щу- j F(z)p (z) dz; [F(z)-my]2p{z)dz. Учитывая равенства (21-168) и (21-169), запишем: К0= - Г F(z)p (z) dz; (21-170) тг J -оо оо 1 ==t~oHJ MW*-(21-171) Аналогично из формулы (21-169) можно получить выражение для коэффициента К[2): Л12>= ~# J (Z - тг) F & <г> йг--оо Значения коэффициентов зависят от вида нелинейности и закона распределения. В большинстве случаев нелинейный элемент в системе регулирования соединяется с инерционными линейными звеньями. Известно, что при прохождении случайных сигналов с любыми законами распределения через инерционные элементы происходит нормализация закона распределения. Поэтому приближенно можно считать закон распределения плотности вероятности нормальным и записать его в виде (см. т. 1, стр. 78): , (г-тг)а Р(г)=-- е 2о-2 . аг V 2л Конкретные выражения для коэффициентов К0, К[ и /с2)при типовых нелинейности* и нормальном распределении имеются в литературе (см. [Л. 4, 12]). Например, для релейной характеристики (рис. 21-98,6) 2В I т,\ к -Ф -Ч; (21-172) тг \ ог ) = - ф!- . (21-173) (через ф обозначено выражение в квад- ff ратных скобках); е 2 \ °J (21-174) 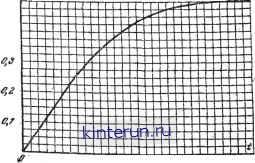 Рис. 21-107. Структурная схема для вычисления характеристик выходного сигнала методом статистической линеаризации. Заметим, что в формулах (21-172) и (21-173) функция Ф ) = может быть представлена в виде графика (рис. 21-109). v * Для интеграла, записанного в другой форме, а именно Ф(х) = ~= Г . dr. Vn J .f 4 Рис. 21-109. График функции Ф(*)- ожидание и дисперсию выходной величины следящей системы. Для этого систему с нелинейным элементом приводят к виду, представленному на рис. 21-107, где нелинейный элемент расположен в цепи обратной связи. Это можно сделать путем простых преобразований, аналогичных рассмотренным на стр. 132. В результате замены нелинейного элемента статистическим эквивалентом вместо одной нелинейной системы получаем две линейные: одну (рис. 21-108, а) с коэффициентом передачи Ко, справедливую для математического ожидания твх и тВЫх, другую с коэффициентом передачи К± (рис. 21-108, б) для флуктуационных составляю- можно воспользоваться таблицами (см., например, т. I, стр. 79, табл. 1-9). Переход рт одной формы к другой производится путём соответствующего изменения масштабов. Tlj-j -gH hp Рис. 21-108. Эквивалентные схемы линеаризованной системы. а - для математического ожидания; б - для вычисления дисперсии выходной величины. Анализ показывает [Л. 12], что для повышения точности вычислений при статистической линеаризации в качестве коэффициента Ki целесообразно брать среднее арифметическое значение коэффициентов К[ и К , т. е. С помощью метода статистической линеаризации можно найти математическое щих 0ВХ и JBbDC . При этом входной и вы- ходной сигналы равны: ©Кх= вх+0вх-. ®в вых 1 вых где выходной сигнал системы одновременно является выходным сигналом НЭ: вВЫ1=г. Передаточные функции системы имеют вид: <МР) = (Р) = л.ч (Р) 1 +Кол.ч(р) Ул.ч 0 ) 1 + Кг №л.ч (Р) Так как входной сигнал НЭ является выходным сигналом системы, то коэффициенты Ко и /Ci зависят от математического ожидания т вых и дисперсии овых выходного сигнала 0Вых системы, которые в свою очередь являются функциями статистических характеристик сигнала твк н овх на входе системы. Для установившегося режима математическое ожидание выходного сигнала находится из равенства W .4 (0) те , (21-175) 1+/С0(/явых, ой *) №л.ч(0) а дисперсия выходного сигнала (см. рис. 21-108,6)-из соотношения SBX (со) х W\,.4 (/со) 1+Кг(твьа, авых) W .4 (/со) dco. (21-176) В последней формуле SBX (со) - спектральная плотность случайной составляющей входного сигнала системы. 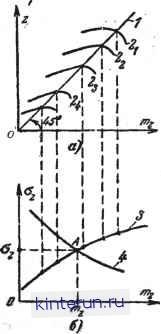 Рнс. 21-110. Графики, иллюстрирующие вычисление средних значений и дисперсий при использовании метода статистической линеаризации в общем виде. Система уравнений (21-175) и (21-176) содержит две неизвестные величины тВЫх и авых- Поскольку характер зависимости Ко и Ki от этих величин, определяемый типом нелинейного элемента, известен, эта система может быть решена. В результате решения получаются искомые величины fflBui и Овьк. Чаше всего решение находится графически [Л. 2, 12]. Наиболее просто решение осуществляется с помощью следующего построения. Вводится новая переменная £=/иВЫх. Тогда уравнение (21-175) переходит в систему двух уравнений: % = *явых; --ЪШ-(2М77) В системе координат (£, твыз[) строится прямая /, соответствующая первому уравнению (рис. 21-110,а). Задаваясь далее величиной о,ы! как параметром, строят серию кривых, каждая из которых соответствует определенному значению £(/иВы*): 2i, 2г, 23 ... Точки пересечения прямой / с кривыми 2 определяют зависимость о вых( гВЬ1х), удовлетворяющую системе (21-177) и, следовательно, уравнению (21-175) - (кривая 3 на рис. 21-110,6). 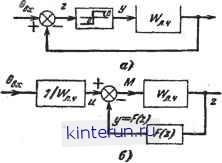 Рис. 21-111. Исходная структурная и преобразованная схемы, иллюстрирующие расчетный пример. Далее, значения аВых и тВЫх, отвечающие кривой 3, подставляются в формулу (21-176) и для каждой такой пары вычисляется соответствующая величина аВЫх. При этом, конечно, используются формулы (21-172) и (21-173) для вычисления коэффициентов Ко и Ki. Таким образом получается еще одна кривая, которая наносится на ту же координатную плоскость (кривая 4 на рис. 21-110,6). Точка а пересечения этих кривых соответствует решению системы уравнений (21-175) и (21-176) и определяет искомые значения аВЫх=аг и твых=тг. Пример. Продолжим рассмотрение примера на стр. 130 (рис. 21-98) нелинейной системы, содержащей релейный элемент и линейную часть - исполнительный двигатель с передаточной функцией r W-r< - р(Г*+1) . Предположим, что на вход системы (рис 21-111, а) подается регулярное управляющее воздействие a(t) - х0 + vot (где хо и vо - постоянные величины) и стационарная случайвая помеха х° с нулевым средним значением, имеющая корреляционную функцию и соответствующую спектральную плотность Role-W; S (со) = - а2 + со2 l+Ko (твых, авых) Wa.4 (0) Таким образом, входной сигнал 0вх(О = Xo + Vot + Jfi.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


