
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Переходная функция Переходной функцией (или переходной характеристикой) линейного динамического звена называют зависимость выходной величины от времени при условии, что на вход динамического звена в момент t-Q подается ступенчатый сигнал (или сигнал включения) единичной амплитуды. Таким образом, переходная функция ft (г) является реакцией цепи на единичную ступенчатую функцию. Учитывая, что изображение единичной функции есть 1/р, для ft (2) можно записать: h(t)=L-*{W(p)/p}, (21-12) где L-1 обозначает операцию обратного преобразования Лапласа. Последняя формула получена путем подстановки в выражение (21-4*) вместо Х(р) величины 1/р, которая является изображением единичной ступенчатой функции. В результате этого получается изображение переходной функции. Для получения оригинала (т. е. самой переходной функции) необходимо осуществить обратное преобразование Лапласа, как это обозначено в формуле (21-12). Для вычисления обратного преобразования Лапласа используют таблицы (см. т. 1, табл. 1-6) или применяют вторую теорему разложения (см. т. 1, стр. 48), представляя выражение в фигурных скобках формулы (21-12) в виде суммы простейших дробей. Обратное преобразование Лапласа для каждой из таких дробей представляет собой экспоненту. Если передаточная функция содержит k нулевых полюсов, т. е. нулевых корней полинома знаменателя передаточной функции, то в разложении появятся члены типа ак/рк, которым соответствуют обратные ,k-i преобразования Лапласа вида a*~~-JJ , (см. т. 1, стр. 46). При высокой степени полинома знаменателя передаточной функции затруднительно вычисление его корней и, следовательно, возникают сложности разложения W(p)/p на простейшие дроби. В этом случае прибегают к приближенному построению переходной функции h(t) всей системы по вещественным частотным характеристикам замкнутых систем, полученным путем использования ЛАХ и ЛФХ отдельных звеньев, а также к моделированию звеньев с помощью аналоговых математических машин. Заметим, что для всякого физически возможного звена сигнал на выходе не может появиться до поступления сигнала на вход, т. е. h(t) = 0 при t < 0. Последнее выражение называют условием физической возможности (или осуществимости) звена (системы). 2-1248 Импульсная переходная функция Импульсная переходная функция g(t) (импульсная переходная характеристика или весовая функция) является реакцией звена на б-функцию, приложенную к звену в момент =0 (см. т. 1, стр. 49 и 183). Так как изображение б-функции равно 1, импульсная переходная характеристика находится как обратное преобразование Лапласа от передаточной функции g(t) =L-4\-W(p)} = = L-t{W(p)}. (21-13) Для вычисления g(t) используются либо таблицы оригиналов и изображений, либо представление W(p) в виде простейших дробей, для каждой из которых обратное преобразование Лапласа выражается экспо-нентой. В последнем случае требуется нахождение корней полинома знаменателя передаточной функции. Для вычисления импульсных переходных характеристик (особенно при теоретических исследованиях) могут быть использованы формулы обращения Римана - Меллина (см. т. 1, стр. 48). Для любой физически возможной системы g(t)-0 при г<0, так как сигнал на выходе не может появиться до поступления сигнала на вход: Связь между характеристиками Между отдельными характеристиками существует связь (см. т. 1, стр. 181-184), поскольку каждая из характеристик определяет динамические свойства звена. Важнейшими из этих соотношений являются следующие: g (t) = - J К (/со) еш da; (21-14) /С </о>) = J g(t)e-iat dt; (21-15) и W(p) = § git)e-#dt. (21-16) Для у9тойчивых звеньев все указанные интегралы существуют. Из формулы (21-16) следует, что передаточная функция является преобразованием Лапласа от импульсной переходной характеристики. Импульсная переходная характеристика является производной от переходной характеристики, т. е. (0 = dh(t) dt Эти формулы позволяют выразить импульсную переходную характеристику через передаточную функцию или частотную передаточную функцию (комплексный коэф- фициент передачи), причем формулы (21-15) и (21-14) являются прямым и обратным преобразованием Фурье. Одной из сторон взаимной связи между частотными и временными характеристиками является положение о том, что чем  нии. В реальных .условиях величина К постоянна только на некотором ограниченном участке ab изменения входной величины, где зависимость у от,х линейна (рис. 21-12). Когда рабочая Точка й лежит на криволинейном участке, реальную зависимость
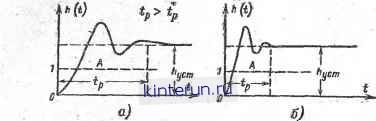 Рис. 21-11. Характеристики К(й>) и h(t). А - входной сигнал (ступенчатый сигнал амплитуды А). шире частотная характеристика (больше полоса пропускания), тем быстрее протекают процессы установления. Это положение иллюстрируется рис. 21-11. Амплитудно-частотная характеристика К(а) для случая (б) шире, чем для случая (а), поскольку при определенном уровне К(а) CDj >соь соответственно время установления /р переходной характеристики h (г) (т. ё. длительности переходного процесса) в случае (б) меньше, чем в случае (а). 21-3. ОСНОВНЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ И ИХ СВОЙСТВА для малых отклонений от точки й заменяют отрезком прямой, касательной к характеристике у(х) в точке d. Коэффициент передачи при этом будет равен /C<i=tga. Такая замена называется линеаризацией характеристики реального звена.  В дальнейшем дается определение основных линейных динамических звеньев и рассматриваются их характеристики. При этом всюду предполагается, что в каждом динамическом звене имеются устройства для выполнения условий однонаправленно сти и независимости (см. стр. 12); эти устройства на рисунках не обозначаются. Пропорциональное (или усилительное) звено Пропорциональное звено характеризуется постоянным (в общем случае размерным) коэффициентом передачи К=у/х. К такого рода звеньям относятся не только усилители, но и такие устройства, в которых одна физическая величина преобразуется в другую в постоянном отноше- Рис. 21-12. Характеристика усилительного (пропорционального) звена. Линеаризация звена в точке d. Пример 1. Управитель частоты в системе АПЧ (стр. 10). Его работу характеризует зависимость между отклонением частоты гетеродина Д/г и управляющим напряжением иу: А/г = KyAUj. Отношение выходной величины (Д/г) ко входной величине (Дну) - передаточная функция звена №=Д/Г/Дцу - есть величина постоянная (для участка ab характеристики). Это отношение является коэффициентом передачи Ку звена с размерностью герц на вольт. Пример 2. Частотный дискриминатор в системе автоподстройки частоты (если не принимать во внимание инерционности сглаживающих ?С-элементов) характеризуется зависимостью выходного напряжения ыд от расстройки частоты Д/ относительно переходной частоты дискриминатора ыд = KzAf. Отсюда передаточная функция (коэффициент передачи) х Af Инерционное звено Инерционным -называется звено, имеющее передаточную функцию (рис. 21-13): W(p) или 2/(0 = У(р) Х(р) тР+\ TD + 1 Y(p) Рис. 21-13. Инерционное звено. Параметры звена: Т - постоянная времени, характеризующая инерционность звена (размерность - секунда); К - коэффициент передачи звена (в общем случае, размерная величина). В установившемся режиме уусч при постоянном входном сигнале х=Х0 производная выходной величины равна нулю; следовательно, полагая р=0, находим; J/уст === КХо. Комплексный коэффициент передачи получается из передаточной функции заменой р на /со:. (/И) = lcДг==Я{tй)e/Ф(t0, Инерционное звено описывается следующими характеристиками. А мплитудно-фазовая характеристика К (/со) = ы(со) +}v(a), U (со) 1 + со2Г2 v (со) = 1 + со2 Г2 Характеристика представляет собой полуокружность, расположенную в четвертом квадранте, пересекающую ось и при со=0 (точка с абсциссой К) и стремящуюся к нулю при to -* оо (рис. 21-14). Амплитудно-частотная К К (СО): характеристика Vi + № = yV-H>2. При со=0 /С(ш) имеет максимальное значение, равное К., и убывает, .стремясь к нулю, с увеличением со. Чем больше Т, тем интенсивнее убывает К(а) с ростом частоты (рис. 21-15). 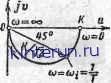 Рис. 21-14. Амплитудно-фазовая характеристика инерционного авена.  Рис. 21-15. Амплитудно-частотная н фазо-частотная характеристики инерционного звена (постоянные времени Т<Т ). Фазо-частотная характеристика V ((О) ф (со) = arctg --- = - arctg фТ. и (со) При со=0 фазовый сдвиг равен 0. С увеличением частоты сдвиг по фазе выходных колебаний растет тем интенсивнее, чем больше Т, стремясь к - зт,/2 при (0->-оо. На частоте (£>{=1/Т фазовый сдвиг составляет -я/4. Логарифмическая амплитудная характеристика (ЛАХ) L (со) = 20 lg \К (/со) = 20 Ig К (со) = = 201g - = У 1 + (соГ)2 . = 20 lg К - 20 lgУ\ + (шТ)2. Для ю используется логарифмический масштаб. Практически значительно удобнее пользоваться приближенными ЛАХ. Для очень низких частот (o<(Oj = l/7 в подкоренном выражении величиной (соГ)2 можно
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


