
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Замена эквивалентной системой правомочна, если tycT>>TB, т. е. при условии АТп<<3 или пКТв=3, где п - некоторое число (ге>>1). Выбрав п=30, найдем 30АТП=3, т. е. /СГП=0,1. Условие эквивалентности требует, чтобы отношение K/Fn<<l (где Fn - частота повторения импульсов), например K/Fn=0,l. Система с П-ключом. При замене экст-раполятора П-Ключом (рис. 21-93, в) коэффициент передачи уменьшается в y=tK/Tn раз и станет равным Кэ=Ку, где К-Кв. Таким образом, условие эквивалентности запишется в виде КуТп<<1. Пример 2. Найти, при каком условии можно заменить систему с П-ключом и инерционным звеном эквивалентной непрерывной системой. Так как коэффициент передачи эквивалентной непрерывной системы Ка=Ку (см. предыдущий пример), где К - коэффициент передачи инерционного звена, то для передаточной функции замкнутой, эквивалентной системы запишем: Ф{р) Тр + 1 + Кэ 1 + Кэ тэр + 1 Кэ + 1 время Следовательно ЗТ tycT=~-Г~Г и условие установления эквивалентности Ка + 1 tyc-r>>TB. Отсюда получаем: Ка = Ку ~ - 1, Р где 6=Гп/7 . Удовлетворить этому условию нельзя, если 6>3, т. е. если отношение Тп/Т достаточно велико (период следования импульсов мал по сравнению с постоянной времени системы, т. е. импульсы следуют редко ). Чем меньше В, т. е. чем чаще следуют импульсы, тем при больших коэффициентах передачи правомочна замена дискретной системы непрерывной. Заметим, что полученное условие эквивалентно значительному удалению системы от неустойчивого режима. В этом легко убедиться, если сравнить величину К у с критическим коэффициентом усиления для той же дискретной системы (см. пример 2 иа стр. 118). 21-12. НЕЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ Особенности нелинейных автоматических систем Система автоматического управления является нелинейной, если в ней содержится хотя бы один нелинейный элемент, г. е. такой элемент, для которого не выполняется принцип суперпозиции. Чаще всего в практике встречаются безынерционные нелинейные элементы, для которых выходной (у) и входной (г) сигналы связаны нелинейной зависимостью, не содержащей время в явном виде: y = F(z). . Характеристики наиболее распространенных нелинейных элементов и наименования этих элементов приведены в табл. 21-12. Нелинейность типа нечувствительности характерна для исполнительных двигателей, где вследствие сухого трения движение начинается лишь после того, как входное воздействие (напряжение на якоре или управляющей обмотке) выйдет за пределы ±а. Нелинейность типа ограничения характерна для усилительных элементов, которые способны усиливать входной сигнал в ограниченной области ±В/К, где К - коэффициент передачи для линейного участка. При \z\>B/K выходной сигнал остается неизменным и равным В. Нелинейности релейного типа характерны для разнообразных электрических и других реле, используемых в системах управления. Нелинейность типа застоя (гистерезис) возникает, например, в зубчатых передачах (люфт), а также может встречаться в магнитных элементах, обладающих гистерезис-ной петлей. Нелинейность типа дискриминационной характеристики имеет практически все измерительные элементы систем радиоавтоматики (см. разд. 22). Ее можно аппроксимировать различными выражениями; в табл. 21-12 приведена одна из наиболее распространенных аппроксимаций. Иногда используется другая аппроксимация полиномом третьей степени: Кг 1 0 \г\>г. На малом участке ab, окружающем нулевую точку, зависимость F(z) можно считать линейной, т. е. у-Кг, причем коэффициент передачи dF(z) для обеих аппроксимаций. Своих экстремальных значений дискриминационная кривая достигает при гЭКСТр = ± и 2ЭКстр = = ±-- соответственно, и эти значения равны: /экстр = ±0,606 Кг и #экстр = = ±0,38бКг. Шириной дискриминационной характеристики, или ее апертурой, называют интервал 2А изменений аргумента г, для которого при z>A выходной сигнал остается близким к нулю, т. е. падает ниже определенного уровня m (обычно 0,1 от эк- стремального). Для принятых аппроксимаций апертура равна 2Д~Зг (см. табл. 21-12) и 2Д 2,68 г. Строго говоря, большинство используемых в практике пропорциональных звеньев являются нелинейными. Часто эти звенья могут быть линеаризованы, т. е. характеристика F (г) может быть представлена отрез- / dF \ ком прямой t/=F(20)+ \~Т~ I (г-г0) \ dz Jza касательной к нелинейной характеристике в рабочей точке (как показано для точки d на рис. (21-12). Однако встречаются случаи, когда такое приближенное представление приводит к неправильным результатам, и влияние нелинейных элементов на свойства системы необходимо учитывать. Влияние нелинейности на свойства автоматической системы. При наличии нелинейности в автоматической системе могут возникать новые явления, не свойственные линейным системам, 1. Автоколебания- периодические движения с устойчивой амплитудой. В линейной системе при потере устойчивости амплитуда колебаний теоретически должна неограниченно нарастать. Вследствие действия нелинейных элементов амплитуда нарастает до определенного предела и в системе устанавливаются периодические движения с устойчивой амплитудой. Некоторые нелинейные системы могут выполнять свои функции, несмотря на наличие автоколебаний, если амплитуда этих колебаний невелика. Более того, в отдельных случаях автоколебания малой амплитуды могут быть даже полезными, поскольку приводят к уменьшению влияния зон нечувствительности на точность системы. 2. Наличие нескольких состояний равновесия. В линейных системах характер состояний равновесия не зависит от начальных отклонений: каково бы ни было это отклонение, устойчивая система в конце концов возвращается в исходное состояние равновесия. Нелинейная система может иметь не одно, а несколько состояний равновесия, каждое из которых может быть как устойчивым, так и неустойчивым. Переход из одного состояния в другое зависит от начального отклонения от данного состояния равновесия. В связи с отмеченным свойством нуждается в уточнении и строгом определении само понятие устойчивости. Наиболее широкое применение нашло понятие устойчивости по Ляпунову (см. далее). 3. Зависимость характера переходного процесса от начальных отклонений. В нелинейных системах характер процесса зависит от начального рассогласования, а также от величины входного воздействия. Наличие нелинейности чаще всего приводит к снижению быстродействия; в некоторых случаях, напротив, благодаря наличию нелинейных элементов удается сократить время переходного процесса в системе. 4. Явления захвата и срыва слежения. Во многих системах радиоавтоматики нели- нейность имеет вид дискриминационной кривой (см. табл. 21-12). Вне апертуры 2Д этой кривой [т. е. при г>Д] выходной сигнал близок к нулю. Для того чтобы система с такой нелинейностью функционировала, необходимо предварительно ввести систему в режим слежения, уменьшив начальное рассогласование до некоторой величины г, лежащей внутри апертуры, или, как иногда говорят, осуществить захват. Захват производится специальной системой (автоматически или вручную), которая отключается, когда рассогласование уменьшается до нужной величины. В том случае, когда рассогласование в системе по каким-либо причинам (например, вследствие внешних возмущений) становится слишком большим и выходит за пределы апертуры дискриминационной характеристики (г>Д), слежение прекращается, поскольку енгнал рассогласования независимо от величины рассогласования остается равным нулю (#=0). Такое явление называют срывом слежения. Захват и срыв слежения возможны только в системах с нелинейными элементами. Для анализа нелинейных процессов в следящих системах нет универсальных методов, какие существуют для линейных систем. Чаще всего в теории автоматического управления используется метод представления процессов в фазовом пространстве (на фазовой плоскости), а также разнообразные приемы линеаризации характеристики нелинейных элементов. Определение устойчивости нелинейных систем Понятие устойчивости нелинейных систем нуждается в строгом определении. Наибольшее распространение получило определение устойчивости систем, сформулированное А. М. Ляпуновым и носящее его имя. Рассмотрим это определение (с целью наглядности) для системы, поведение которой описывается двумя координатами х, у (например, положением и скоростью), хотя само понятие устойчивости можно сформулировать для сколь угодно сложной нелинейной системы. В данном случае состояние системы полностью определяется точкой на плоскости (х, у) (рис. 21-94). (Если состояние системы описывается -координатами, то ему соответствует точка в п-мер-иом пространстве). Предположим, что система находится в состоянии равновесия [точка О (х0, Уо) на рис. 21-94]. Если изменить начальное состояние системы (т. е. отклонить систему от состояния равновесия и затем устранить причины, вызывающие это отклонение), то система придет в так называемое возмущенное движение. А. М. Ляпуновым дано следующее определение устойчивости. Состояние равно- Типовые нелинейные элементы и их характеристики Таблица 21-12 Инд нелинейности График Зависимость F (г) Зависимость -г = и + /о Нечувствительность
У = 0, г < а # = (z -а)Л\ z>a у = (a - z) К, г<а 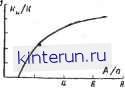 о г -2 -f -э - AJ=£ (cc-st/itz), ос =я- г ¥t, Ограиичение Релейная e/fc
y=Kz, z < -- M = s. г> ии/к А/а, 16 8 г* А -- оо к ф - arc sm -- У = В, г>0 у = -В, г < О 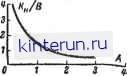
|
|||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


