
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Характеристическое уравнение имеет вид: где Ь0 = 1; bi =-е- + /Се-Р( - l). Условия устойчивости: ba+bi>0 и bo- -bx >0 дают: 1 - е~р + Ке~р ( ePv !) > о; 1 +е р -/Се-р( е- 1 )> 0. Из первого равенства находим: Яе р ( - 1) > е~р - 1 /С( ePv - I ) > 1-ер Так как ePv>l, то ePv -1>0, и мы получаем: 1-е-* Это условие в реальных системах всегда выполняется, поскольку коэффициент К должен быть положительным. Из второго неравенства находим: К(еР> - 1)<ер +1 ер + 1 к< Таким образом, условие устойчивости eP + l имеет вид К<Ккр, где /(Кр=- ер? - 1 критический коэффициент усиления системы. Зависимости /Скр от В при различной величине у приведены на рис. 21-91. Система будет устойчивой только в случае, если коэффициент передачи лежит ниже соответствующих кривых. При использовании вместо П-ключа экстраполятора нулевого порядка импульсная передаточная функция разомкнутой системы (см. стр. 107, пример 3) Y/(z) = W(z, e)e=d0 = K{l- Z~\ ( z - е 1-е- Она совпадает с передаточной функцией системы с П-ключом при y=1: В7(г)=/Се р(еР -1 )---= г - е~Р Отсюда ясно, что случай y=1 соответствует применению в системе экстраполятора нулевого порядка. При этом Ккр = ер + 1 еР- 1 Применим для анализа указанной системы амплитудно-фазовый критерий. 40 35 3D 25 20 15 10 5 о г ч е в Рис. 21-91. Зависимость критического коэффициента усиления 7?кр от отношения Р= -- Для этого, исходя из выражения для W(z), перейдем вначале к нормированному переменному д=рТп, а затем заменим q на /со (со - нормированная частота, to=w7,n). Тогда получим: W\q) = K(e - 1) - W* Цы) = К { e$v - l) е4-- е -Р (21-135) Соответствующий годограф характеристики для Ошл изображен на рис. 21-80. Отсюда ясно, что для того, чтобы система была устойчивой (т. е. чтобы точка (-1,/0) не охватывалась кривой), необходимо выполнить условие: W*(jn, 0) > -1 или W*(jn, 0) < 1. Таким образом, из (21-135) получаем: е-Р K(ePv i )--->-1 К < 1 + е- ер + 1 e-p(ePv 1) ePv i и выражение для критического коэффициента усиления 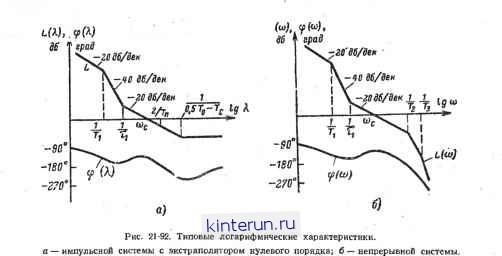 совпадает с найденным ранее с помощью алгебраического критерия. Заметим* что система непрерывного регулирования, содержащая одно инерционное звено, всегда устойчива. Понятие о синтезе дискретных автоматических систем Из разнообразных методов синтеза импульсных автоматических систем наибольшей простотой обладает метод логарифмических характеристик [л. 15]. Идея этого метода состоит в следующем. Для импульсной передаточной функции W(z) вначале осуществляется переход от переменного г к новому переменному w с помощью соотношения 1+ш г-1 г -- или w --= 1-W 2+1 ewn ! . мГп = 7+7=/tg- в случае такого преобразования переменных внутренняя часть единичного круга плоскости комплексного переменного z отображается в левую полуплоскость га-плоскости, а окружность единичного радиуса переходит в мнимую ось плоскости w. Такое преобразование при определенных условиях позволяет осуществлять построение логарифмических амплитудных характеристик для разомкнутых систем как функции псевдочастоты Я, которая вводится равенством 2 w (21-136) 2 иГп Построение лах импульсных систем осуществляется просто при выполнении следующих условий: наклон лах непрерывной части системы в области частот среза составляет 20 дб/дек; частота среза йс лах непрерывной части системы не превышает удвоенной частоты повторения: Сйс<2/Гь; постоянным времени форсирующих звеньев Ть т2, в числителе передаточной функции соответствуют частоты сопряжения, меньшие сос; в системе используется экстраполятор нулевого порядка. При этих условиях лах и лфх непрерывной части системы в области низких частот Ос практически совпадают с дискретными лах и лфх как функциями псевдочастоты Я. в противном случае требуется выполнять чрезмерно большое количество громоздких вычислений, так что метод логарифмических характеристик применять нецелесоо бр азно. Обе характеристики различаются лишь асимптотами в области высоких частот. Так, на рис. 21-92 представлен вид лах и лфх дискретной и непрерывной систем с передаточными функциями ЧР) = р(Т1р+1)(Т2р + 1)-..(Т р + 1) (21-137) К (1 + /Ят Г (А): (A)(i + m (\ + а [+*(т-г*)1 а-Т .-)-----\-Т . Из сопоставления этих выражений следует совпадение передаточных в области нижних частот: функций i(p) = АГ(1 +т1Р) р(7> + 1) 7В (А) = /С(1 +Атх) оценить ошибку, которая образуется при замене, однако можно утверждать, что чем больше число периодов Тп приходится на время установления, тем меньше допускаемая погрешность. При этом требования к параметрам системы, при которых возможна замена эквивалентной системой непрерывного регулирования, вытекают из условий, что время установления в эквивалентной системе много больше периода Гв- A(l -f-ATj) и на участке вблизи частоты среза. Благодаря этому создается возможность производить анализ и синтез системы аналогично тому, как он проводится для непрерывных систем: строятся желаемые ЛАХ и подбираются параметры корректирующих цепей так, чтобы сумма импульсной ЛАХ исходной некорректированной системы и импульсной ЛАХ цепи коррекции давали желаемую импульсную ЛАХ [Л. 15]. Наряду с коррекцией посредством включения непрерывных (аналоговых) цепей в импульсных системах возможно применение дискретных цепей коррекции, в которых входные сигналы квантуются по времени. В частности, функции корректирующего устройства в дискретной системе может выполнять цифровая машина, работающая в общем случае с другим периодом повторения ТиМ. В настоящее время разработаны также вопросы статистической динамики импульсных систем автоматического управления [Л. 14, 19]. Об эквивалентности импульсных и непрерывных систем автоматического регулирования Во многих случаях практики дискретный характер поступающей информации в импульсных системах не оказывает существенного влияния на характер процессов в системе, и такую систему можно приближенно заменить эквивалентной системой непрерывного регулирования. Характерным примером может служить система автоматического сопровождения по угловым координатам в импульсной радиолокационной станции. При обычных для таких станций соотношениях между параметрами дискретный характер поступающих на вход сигналов мало влияет на процессы слежения за целью и входной сигнал вполне допустимо считать как бы непрерывным. Практически такая замена возможна, если время установления процесса в эквивалентной непрерывной системе во много раз превышает период повторения дискретной системы, а переходная характеристика достаточно точно воспроизводится последовательностью импульсов, следующих с интервалом Тп. При указанном приеме нельзя   Рис. 21-G3. Замена дискретной системы эквивалентной непрерывной. а - система с экстраполятором нулевого порядка (ЭНП); 6-эквивалентная непрерывная система; в - система с П-ключом. Пример 1. Найти условия, при которых возможна замена дискретной системы с экстраполятором нулевого порядка или П-ключом с длительностью импульса tn и интегрирующим звеном эквивалентной системой непрерывного регулирования. Система с экстраполятором нулевого порядка. Система с 6-ключом (рис. 21-93) заменяется непрерывной системой (рис. 21-93,6), в которой Ka-Кл, поскольку коэффициент передачи экстраполятора нулевого порядка равен единице (его z-преоб- z- 1 \ разование равно -I . z I Из рис. 21-93,6 для непрерывной системы имеем: р I ф(р)=- тр + 1 где т=1/Кэ. Соответственно переходная характеристика системы h{f) = \-e х =1- е и время установления густ=Зт=3 С.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


