
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ИКП будет определяться потерями лучистого потока в атмосфере. Рассмотрим на примере обзорного ИКП и ЭОПН, как определяется их дальность действия и какая существует при этом взаимосвязь между параметрами приборов. Дальность действия обзорного ИКП по точечному объекту Характеристики объекта, фона, атмосферы и обзорного ИКП, в принципе, известны. Полагаем, что объект может быть обнаружен на экране ИКП с определенной степенью вероятности, если сигнал от него в т раз превышает сигнал, обусловленный либо внутренними, ли- бо внешними шумами (шумами фона), Значение т зависит от требуемой вероятности обнаружения объекта. Дальность действия ИКП (рис. 28-54) определяем для трех основных случаев: 1) объект наблюдается при отсутствии фона; 2) объект наблюдается на фойе с равномерной лучистостью; 3) объект наблюдается на фоне с неравномерной лучистостью. Объект наблюдается при отсутствии фона. Облученность ИКП от объекта определяем по закону квадратов расстояний Е = к- где /д, - спектральная плотность силы излучения объекта; L - расстояние между объектом и ИКП; - спектральный коэффициент пропускания атмосферы (принимаем, что в исходном диапазоне расстояний та не зависит от L). Лучистый поток, поступающий на ПИ при отсутствии сканирования, равен: Внутренние шумы ИКП будут создавать на его выходе шумовой сигнал, средний квадрат которого равен: оо C/m = dfS£/(/)Fy(/)2rf/ = = Su(f)WyaU)\adft (28-62) о где Su(f) - спектр дисперсий шума, Wy (f) - частотная характеристика усилителя прибора; ko - максимальный коэффи-
Рис. 28-54. Схема определения дальности действия обзорного ИКП / - объект; 2 - ОС; 3 - фильтр; 4 - ПИ. циеит усиления усилителя; №y.H(f)-нор мированная частотная характеристика усилителя. Если полагать, что шум белый , то (28-59) £4 = К Sv I \Wy (/)(2 4. = Ч Sv Af, (28-63) где Af- эквивалентная полоса пропускания усилителя. Среднеквадратичное значение шума равно: 1/2 Afl 2 4L2 J Ui =*0S A/ начение l м COOTHOI VsVTf Среднеквадратичное значение шума связано с пороговым потоком соотношением поро VoVfo где ds% - диаметр входного отверстия ОС; - спектральный коэффициент пропускания ОС; Тф1, - спектральный коэффициент пропускания фильтра. Определяем сигнал на выходе усилителя ИКП (сканирования нет) nd2 С Uc = ? *°J 1 h 1 Т°ф11 Ф* 1 Л (28-61). где (fo - спектральная чувствительность ПИ; ko - коэффициент усиления усилителя. где S - площадь данного ПИ; So - единичная площадь ПИ, для которого определялся пороговый поток; Afo - единичная полоса пропускания усилителя. Заметим, что ф0 и РПоРо приведенные величины. Сигнал от объекта должен превышать шумовой сигнал в пг раз: (28-64) Производя необходимые подстановки, получаем: т -- --, (28-65) Величины ]/so и \&f0 опущены, так как они равны единице. Определяем дальность действия ИКП при отсутствии сканирования: £2 = 4mPaopo<p0Vs -VYf Иногда интеграл, стоящий в числителе, удобно представить в следующем виде: ЛаКфаЫ к II *гЫ т т°фат°> IIаЫ - фи&Л INWA INkK< RlkH 1КИ 51 Л * I тфа КIЛ = т° т° т° rfVo . где То> Гф - приведенные интегральные коэффициенты пропускания оптики, фильтра, атмосферы соответственно; т)° - спектральный к. п. д. ПИ; /0 - сила излучения объекта; ф0 - приведенная интегральная чувствительность ПИ-(ф,)т. Тогда о Ч *атфтОлдвж 4mPnopo Vs~V~bf Учитывая, что S=Pco, a dB%fi=/4, где f- фокусное расстояние ОС; А - относительное отверстие ОС; со - пространственный угол зрения ИКП, получаем: L* =- ф . (28-66) Следовательно, с увеличением диаметра ОС при постоянном относительном отверстии дальность действия ИКП увеличивается в KrfBx раз. Так как в обзорном ИКП обязательно осуществляется сканирование поля обзора, то сигнал на выходе прибора является функцией времени, зависящей от скорости сканирования, диаграммы направленности приемной части ИКП, инерционности ПИ и усилителя. Для упрощения выкладок представим эту функцию как преобразование Фурье от ее спектра [/C(Q= j <t>(f)ei2!tfdf. (28-67) Спектр сигнала на выходе ИКП равен: (28-68) где W$(f) -частотная характеристика ПИ; Ф/ (f/шь соу) - пространственный спектр объекта: WN(f/u>i, соу) -ПЧХ приемной части ИКП; со] - угловая скорость сканирования. Ввиду того что наблюдаемый объект точечный, его ПЧС весьма широкий и спектр сигнала будет определяться ПЧХ приемной части и частотными характеристиками ПИ и усилителя. Произведем необходимые замены и перейдем к нормированным характеристикам. Тогда. /очЧ4аТф*0 ф If) =-X со -со Интегральные значения ф0, kQ, /0, т}°, т, т Tq соответствуют введенным ранее величинам. ПЧХ приемной части вычисляется как преобразование Фурье от диаграммы направленности ИКП N (а, р): со -со х e-jdadp, где а, р - угловые координаты диаграммы направленности. Если диаграмма направленности не выражается в аналитической форме, то она может быть представлена для одномерного случая суммой прямоугольников, а для двухмерного - суммой цилиндров или параллелепипедов. Затем вычисляются ПЧХ каждого элемента диаграммы направленности и полученные значения суммируются с учетом веса каждого элемента в общей диаграмме направленности. Подставим полученное выражение для спектра сигнала в формулу преобразования Фурье X edmydf. Интеграл представляет собой нормированное значение сигнала как функции времени /0гЛр0хтЗД с()~ 40) ас-н(°- Для определения дальности действия ИКП составим отношение сигнала к шуму т =-= l0n%0k0TCdlxx0aTlt°0Uc H(t) 40ii2Pnop о Фо *о VТ V~aJ где т- время осмотра угла зрения, Q угол обзора ИКП; Т - время обзора. Тогда Z,2 = 4<o1mPnop0fV 8 Jol4 *a *ф *0 Л УТисл (Г) 4co1mPnop о Vi 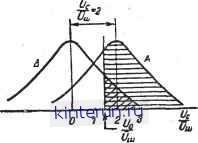 Рис. 28-55. к определению вероятностей появления сигнала и ложной тревоги. Как вндим, наличие сканирования приводит к появлению множителя Uc.n(t), Учи тывающего изменение формы сигнала вследствие конечной ширины полосы пропускания оптической и усилительной систем. При изменении формы сигнала его амплитудное значение может уменьшиться. При расчетах дальности действия ИКП используют либо амплитудное, либо среднеквадратичное значение сигнала. Выясним, что изменится дальность действия обзорного ИКП при различной веро- ятности появления ложных тревог и различной вероятности появления сигнала (см рис 28 55). Полагаем, что внутренние шумы имеют нормальное распределение с нулевым средним значением. Суммарное напряжение сигнала от объекта и шума также распределено по нормальному закону, но имеет Среднее значение, отличное от нуля. Следо-
tV=102 Рис. 28-56. Снижение дальности действия ИКП при увеличении вероятности обнаружения объекта Рп 0 N - число элементов в поле обзора. вательно кривая плотности вероятности для сигнала и шума (кривая А) сдвинута вправо относительно кривой плотности вероятности шума (кривая В). На входе усилителя ИКП обычно устанавливается напряжение смещения 00 и поэтому вероятность обнаружения истинного объекта пропорциональна площади кривой А, лежащей справа от UB, а вероятность ложной тревоги пропорциональна площади кривой В, также лежащей справа от U0. Вероятность обнаружения истинного объекта может быть увеличена как за счет уменьшения начального смещения, так и за счет увеличения сигнала, т. е. перемещения кривой А вправо. В первом случае увеличивается вероятность ложных тревог, что обычно неприемлемо, и поэтому вероятность обнаружения истинного объекта повышают за счет увеличения сигнала, несмотря на то что это приводит к снижению дальности ИКП (рис. 28-56). Объект наблюдается на фойе с равномерной лучистостью. Лучистость фона постоянна и равна Вф. Фон создает на ПИ постоянный поток засветки Р=ВфифИр-тФт* 1о V (28-69)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


