
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств сования 8(0 = x(t) величин ху и ©п -УМ = Ху + хп-у наличием составляющей, обусловленной действием помехи на входе, ©вое = ©-Хп. Оба выражения совпадают (т.е. ©ВОс = =©), если на входе есть только управляющее воздействие: х=ху (т. е. хп=0). Для общего случая, когда х=Ху+хп, в соответствии с формулой (21-19) для 0 имеем. :[©п! + l+W 1+W +W2 W3 Wn ©п2+ - + Wn ©п + ©п. вых] Учитывая формулу (21-36), находим выражение для ошибки воспроизведения ©вог - Wxn+wenl + l + W l+W + w2w3..-wn@m + -r---+Wn lWneBn l + + п©п + © .вых]. (21-37) Ошибка воспроизведения имеет составляющие, обусловленные управляющим воздействием Ху и помехами хп, ©ш, ©пг. -. ©пи, ©п.вых. Составляющая ху, обусловленная управляющим воздействием, называется динамической ошибкой системы. При вычислении статистических характеристик ошибки воспроизнедения ограничимся случаем, когда на систему действует единственное возмущение ©п(0 между звеньями W{ и W2 (рис. 21-66,6). Тогда из выражения (21-37) сразу находим: ©ног. - 1 + W 1 +w w9, © : l + W (21-38) 0Q =\-Ф = передаточная 1 + W функция по ошибке (см. стр. 43), a W2- передаточная функция звена между точкой приложения возмущения ©п и выходом системы. Так, если возмущение ©п приложено ко входу (®а=хп) или к первому звену (Gn = ©ni), то W2-W; если помеха ©л приложена К ВЫХОДУ (0п = ©п.вых), ТО W2=l. Уравнению (21-38) отвечает структурная схема на рис. 21-66. е, показывающая, что ошибка воспроизведения получается сум- W2 мированием сигналов Фв % и - тк/ д образующихся в результате прохождения соответственно через W2 Если сигна- фильтры Фе и Ф= лы Ху и ©п описываются стационарными статистически независимыми случайными функциями, то спектральная плотность ошибки воспроизведения (см. т. 1, стр. 90) 5вос(Ш) = 1Фв(/Ш)25у (<*> + + Ф (;to)PSn(co). Здесь (и всюду далее) Sy (со) и Sn (со) - энергетические спектральные плотности управляющего воздействия и помехи соответственно. Если возмущение ©п приложено ко нходу первого звена системы (т. е. @п=х и на входе действует сигнал х= =Ху + Хи), то ФОсо) =Ф(/со) и SBoc(a)) = l0©(/<B)2Sy(<O) + + Ф(/со)Р5п(со). Таким образом, спектральная плотность динамической ошибки определяется прохождением управляющего воздействия через  Рис. 21-67. Амплитудно-ча--стотиые характеристики для замкнутой системы Ф(/< >) и для ошибки 11 - Ф( /< >). фильтр с амплитудно-частотной характеристикой Фе = 1-Ф(/со) в то время как спектральная плотность ошибки обусловлена действием помехи, проходящей через фильтр с амплитудно-частотной характеристикой замкнутой системы Ф(/со) (рис. 21-67). Если случайные функции статистически зависимы, в выражение для спектральной плотности ошибки воспроизведения входят взаимные спектральные плотности ©вх и ©п. Наиболее часто встречающиеся выражения лая основных соотношений эргоди-ческих процессон в автоматических систе-ах приведены в табл. 21-5. Для нахождения дисперсии ошибки воспроизведения учтем, что дисперсия связана со спектральной плотностью соотношением (т. 1, стр. 87 и строка 2 таблицы): 2л J S (со) tfco.
Продолжение табл.
Поэтому дисперсия ошибки воспроизведения °вос = 7£ j Sy (со) rfco + либо как (/C0)2Sn(C0)dC0 = = °дии+<4 (21-39) т. е. общая дисперсия складывается из дисперсии динамической составляющей ошибки ОдИН, обусловленной случайным управляющим воздействием, и дисперсии помехо-ной составляющей ошибки о , обусловленной действием нозмущения. Учет других статистически независимых возмущений снодится к добанлению в формулу (21-39) составляющих, аналогичных оп. При анализе дейстния помех удобно пользоваться понятием эквивалентной (энергетической) шумовой полосы, которая определяется либо как 2п J Ф (/со)2 dco Ф*(0) Ф(/со)рЖо Ф2(0) Ясно, что (AFs0 определена лишь для положительных частот). Формула для Д/э учитывает положительные и отрицательные частоты и используется обычно при теоретическом анализе; формула для AFbg - только положительные частоты и используется чаще всего при экспериментальных исследованиях. Эквивалентная полоса равна ширине прямоугольника с высотой Ф2(0) и площадью, равной площади, расположенной под кривой JФ(/со) 2 (рис. 21-68). Напомним, что Ф(0)=к для астатических и К ф(0)=-- для статических систем. 1 + К Во многих случаях практики спектр помехи оказывается весьма широким по сравнению с эквивалентной полосой системы, т. е. Sn(co) в пределах характеристики Ф(/со)г меняется незначительно, и без большой ошибки S(co) можно принять равной значению при со=0. Тогда выражение для дисперсии ошибки, обусловленной действием помех, сильно упрощается: 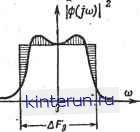  Рнс. 21-68. Графики, иллюстрирующие понятие эквивалентная полоса системы . а - для частот со<ео<оо; б-для положительных частот ~Sn(0)T J Ф(/со)Мсо = = Sn(0)AF9 (21-40) (здесь принято Ф(0) = 1), т.е. система считается астатической; для статической системы правую часть равенства нужно умножить на [К/К+ + 1]2). То же выражение можно записать иначе:
|
|||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


