
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ставляющее собой разовую команду на выходе приемной установки КРУ. Все рассмотренные выше КРУ рассчитаны на передачу лишь одной разовой команды. Если необходимо передавать несколько разовых команд, используя при этом радиосигнал лишь одной несущей частоты, то КРУ должны быть многоканальными. Наиболее просто многоканальная КРУ может быть построена при использовании синусоидальных поднесущих колебаний с различными частотами для каждого канала; при этом каждое из поднесущих колебаний, должно подключаться к передатчику датчиком команд соответствующего канала. Возможны также многоканальные КРУ, шифраторы которых для каждого-канала содержат те же элементы, что и в одноканальных КРУ (рис. 27-52 и 27-53). 27-8. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА И УПРАВЛЯЕМЫЕ ОБЪЕКТЫ Исполнительные устройства Исполнительные устройства (ИУ) систем радиоуправления предназначаются для перемещения органов управления на управляемом объекте под действием сигналов, которые вырабатываются командными радиолиниями управления (в системах командного управления) или координаторами в системах самонаведения, управления по радиозоне и автономного управления. При управлении летательными аппаратами на ЙУ воздействуют также дополнительные сигналы управления. Они вырабатываются гироскопическими датчиками, акселерометрами и т. д., установленными на управляемом объекте и воспринимающими угловые колебания УО, его нормальные ускорения и т. п. Совокупность дополнительных сигналов управления и выходных сигналов радиоаппаратуры называется управляющими сигналами. Функции, выполняемые исполнительными устройствами, могут быть самыми разнообразными: открытие и закрытие вентилей и других подобных устройств у двигателей внутреннего сгорания при регулировании режимов их работы; перемешение ручек выключателей или электрических регулирующих элементов у дизель-электрическнх двигателей и у электродвигателей; перемещение рулей у самолетов и ракет; открытие и закрытие шторок, регулирующих световой поток; включение и выключение различных узлов и агрегатов и т. п. Исполнительное устройство обычно состоит из усилителя мощности (электронного, магнитного, электромагнитного, гидравлического или пневматического) и оконечного элемента. Оконечными элементами исполнительных устройств являются электродвигатели, электромагниты, гидродвигатели, пневмодвигатели, пиропатроны, магнитоэлектрические системы, электромехани- ческие реле и др. С помощью электродвигателей, пневмодвигателей, гидродвигателей и магнитоэлектрических систем, входящих в состав замкнутых систем регулирования, производится пропорциональное перемещение органов управления УО. Такие виды ИУ, как электромагнитные, контактные, в виде пиропатронов и т. п., позволяют вы- 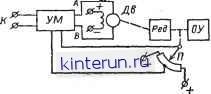 Рис. 27-54. Схема исполнительного устройства с электродвигателем постояниого тока. поднять операции типа включено , выключено . Для непрерывного изменения параметров, регулирующих число оборотов у генераторов на электростанциях или уровень воды в каналах, изменяющих тягу двигателя внутреннего сгорания и т. п., используются электродвигатели и электромагниты, включаемые в состав следящих систем. Помимо электромеханических устройств на управляемых объектах могут применяться также пневмо-и гидросистемы автоматического воздействия. Для примера рассмотрим простейшую схему исполнительного устройства с электродвигателем постоянного тока (рис. 27-54). К электродвигателю Де подводится напряжение, вырабатываемое усилителем мощности УМ, на вход которого подаются команды управления К. Электродвигатель через редуктор Ред связан с органом управления ОУ и потенциометром П обратной связи. Напряжение ип, снимаемое с потенциометра П, по цепи обратной связи поступает на усилитель мощности УМ, где производится сравнение К с ип и усиление разности напряжений К-ип. Орган управления ОУ и движок потенциометра - обратной связи перемещаются до тех пор, пока напряжение между точками Л и В не станет равным нулю, т. е. пока не будет выполнена поступившая команда. Для устранения колебаний ротора двигателя, которые могут возникать в рассматриваемой системе, необходимо ввести демпфирующее устройство. Особую группу составляют автопилоты. Автопилот представляет собой устройство, предназначенное для стабилизации осей и изменения направления движения управляемого объекта (самолета, корабля, ракеты и т. д.) под действием сигналов, поступающих с координаторов или командных радиолинии управления путем воздействия на органы управления. Автопилот состоит из измерительного устройства, задающего устройства, усилительно-преобразовательного устройства и рулевых машин (рис. 27-55). Измерительные устройства (обычно гироскопические приборы и акселерометры) измеряют параметры движения управляемого объекта, необходимые для стабилизации его углового положения в пространстве и получения заданных динамических свойств системы радиоуправления. Задающее устройство в соответствии с сигналами координатора или КРУ меняет ориентацию измерительных устройств и воздействует на усилительно-преобразовательное устройство. В усилительно-преобразовательном устройстве производится суммирование сигналов, вырабатываемых измерительными устройствами и задающими устройством, усиление этих сигналов и их преобразование к виду, удобному для работы рулевых машин. Последние перемещают органы управления. Иногда сигналы координатора или КРУ подаются непосредственно на усилительно-преобразовательное устройство. Когда выходные сигналы координатора или КРУ отсутствуют, автопилот работает в режиме стабилизации. В данном режиме гироскопические датчики измерительных устройств вырабатывают напряжения, характеризующие отклонение осей УО от заданного направления. Под действием этих напряжений (после их прохождения через усилительно-преобразовательное устройство) рулевые машины отклоняют органы управления УО и последний изменяет направление своего движения Как только оси УО возвратятся в исходное положение, выходные сигналы гироскопических датчиков будут равны нулю и органы управления устанавливаются в исходное положение. Сигналы координатора или КРУ вызывают дополнительные перемещения органов управления и, помимо того, изменяют ориентацию системы стабилизации. Вследствие этого под действием сигналов радиоаппаратуры осуществляется перевод УО с одной траектории движения на другую и изменяются направления, относительно которых стабилизируются оси УО в пространстве. Управляемые объекты Наиболее часто встречаются следующие управляемые объекты: сухопутные и надводные транспортные средства; метеорологические радиотелеметрические станции, установленные в труднодоступных для человека местах; генераторы электростанций; иасосы для нагнетания воды в места залегания нефти; телевизионные передатчики для контроля производственных процессов, в медицине и при научных исследованиях; модели самолетов и беспилотные самолеты; ракеты различного назначения; приборы и системы, устанавливаемые на искусственных спутниках Земли и космических летательных аппаратах. Каждый управляемый объект является звеном системы управления, в связи с чем на параметры и характеристики радиоаппа- ратуры и исполнительных, устройств существенное влияние оказывают все основные свойства УО. Наиболее сложными управляемыми объектами являются корабли, самолеты, ракеты. Так, рассматривая детально, например, самолет или ракету как объект регулирования можно убедиться, что их свойства описываются громоздкой системой нелинейных дифференциальных уравнений. Эти уравнения связывают отклонение органов управления с параметрами движения, в качестве которых принимаются величина и на- Измеритель-устройство усилительно - преобразовательное устройство
Задающее устройство Сигналы координатора или ИРУ Рис. 27-55. Упрощенная функциональная схема автопилота. правление вектора скорости или ускорения УО. Поэтому на ранних стадиях проектирования систем радиоуправления такими объектами используются упрощенные (линеаризованные) уравнения их движения, что иногда дает возможность аналитически исследовать основные возможности будущей системы. Наиболее же часто проектирование с ястемы радиоуправления подвижными объектами приходится проводить при широком использовании электронных вычислительных машин, позволяющих моделировать процессы в сложных системах автоматического регулирования, каковыми и являются современные системы радиоуправления ракетами, самолетами и т. д. Детальные сведения о передаточных функциях автопилотов и летательных аппаратов можно найти в [Л. 1, 2, 5, 6], ЛИТЕРАТУРА I. М. В. Максимов, Г. И. Гор-гонов, Радиоуправление ракетами, Советское радио , 1964. 2 В. Н. Т и п у г и н, В. A. Be fine л ь, Радиоуправление, Советское радио , 1962. 3. Б. X. Кривицкий, Автоматические системы радиотехнических устройств, Энергия , 1962. 4. Л. С. Гуткин, Принципы радиоуправления беспилотными объектами, Советское радио , 1959. 5. В. А. Б о д н е р, М. С. Козлов, Стабилизация летательных аппаратов и автопилоты, Оборонгиз, 1961. 6. А. С. Л о к к, Управление снарядами, Изд-во иностр. лит., 1957.  РАЗДЕЛ 28 ТЕХНИКА СОДЕРЖАНИЕ 23-1. Общие сведения . 616 Величины и единицы, характеризующие инфракрасное излучение (616). Особенности инфракрасной техники (616). Применение инфракрасной техники (617). . 28-2. Тепловые источники ИКИ .... 620 Основные законы теплового излучения (620). Тепловые источники ИКИ (623). Пространственный спектр ИКИ (625). 28-3. Приемники излучений......628 Основные характеристики ПИ (628). Фотоэлектрические приемники излучений (633). Приемники излучений с внешним фотоэффектом (633). Приемники излучений с внутренним фотоэффектом (635). Тепловые приемники излучений (637). Устройства для охлаждения ПИ (638). 2S-4. Прохождение инфракрасного излучения через различные среды.....639 Основные соотношения (639). Отражение лучистого потока (640). Пропускание лучистого потока (640). Оптические фильтры (642). Пропускание ИКИ атмосферой (643). 28-5. Оптические системы для ИК-лучей . 64!6 Параметры и устройство основных оптических систем (648). Линзовые ОС (649). Зеркальные и зеркально-линзовые ОС (650). Конденсоры (651). Волоконная (нитевидная) оптика (651). 28-6. Расчет дальности действия приборов инфракрасной техники......652 Общие соотношения (652). Дальность действия обзорного ИКП по точечному объекту (653). Дальность действия электронно-оптического прибора наблюдения (657). Литература ............. 658 28-1. ОБЩИЕ СВЕДЕНИЯ Величины и единицы, характеризующие инфракрасное излучение Инфракрасные излучения (ИКИ) занимают область электромагнитного спектра от 0,76 до 1 000 мкм. С одной етороны этой области расположены видимые излучения (0,38-0,76 мкм), с другой - миллиметровые излучения радиодиапазона. Инфракрасные, видимые и ультрафиолетовые (0,01-0,38 мкм) излучения составляют оптический диапазон электромагнитного спектра, который обладает определенными свойствами, отличными от свойств спектра радиодиапазона. Электромагнитные излучения оптического диапазона характеризуются величинами и единицами, приведенными в табл. 28-1. В таблице помимо энергетических даны также световые величины, определение которых - см. на стр. 629. Особенности инфракрасной техники Инфракрасная техника (ИКТ) - область техники, в которой рассматриваются вопросы использования инфракрасных излучений для обнаружения объектов, измерения дальности до них, оп- ределения их температуры, слежения за ними, управления ими на расстоянии и т. д. Все тела, температура которых отлична от абсолютного нуля, обладают собственным ИКИ. Поэтому использование ИКИ для указанных целей дает известные преимущества с точки зрения уменьшения весов и габаритов приборов, так как отпадает необходимость в применении специальных генераторов излучения. Кроме того, благодаря более короткой по сравнению с радиодиапазоном длине волны излучения при заданных габаритах антенн можно -получить большую разрешающую способность и большую направленность излучения. Недостатком в использовании ИКИ является то, что они плохо, по сравнению с радиоизлучениями, проходят через замутненную атмосферу (хотя значительно лучше, чем видимые и ультрафиолетовые излучения) . В радиотехнике информация передается с помощью излучения, модулированного по амплитуде, частоте или фазе. В случае амплитудной модуляции частота несушей фиксирована и занимает узкий диапазон электромагнитного спектра. Выделение модулированного сигнала происходит в результате его детектирования и последующего усиления на низкой частоте.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


