
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Пример. Подобрать корректирующее звено и определить его параметры. (Продолжение примера стр. 61). Наиболее близкой к ЛАХ корректирующей цепи янляется ЛАХ интегро-дифференцирующего контура. Определим параметры этого контура (fliC R2C2). Согласно рис. 21-35 н 21-62 имеем: 1 1 тг = = - =-= 0,25 сек; <в2 4 - R2 2 - - дв - 0.1 сек; Тл = - =-- == 1,25 сек; щ 0,8 То =-= 0,02 сек. град 100 80 60 -6 -г
6 10 14 18 дб Рнс. 21-63. Графики \х* для построения запретных \ зон по фазе. L - значения ЛАХ; М - показатель колебательности. It и 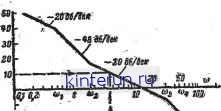 Рис. 21-64. Построение одной точки запретных зон по ЛАХ системы. £((0) - ЛАХ; Ф(ш) - ЛФХ. Зоны построены для М = 1,2 и М = 1,5. Частоты сопряжения: со,= =0,5 \1сек; е>2=1,84 1/сек; (03=33,4 Цсек; ,= =50 1/сек Из соотношения ri+r2=iCl+i?2C2+iC2 находим: RiC2 = 1,25 + 0,02 - 0,1 - 0,25 = 0,92 сек Одним из параметров следует задаться, например емкостью С2=1 мкф. Тогда 0,92 Rx =-= 0,92 Мом; 0,25 0,1 - = 0,27 мкф; R2 = -=0,1 Мом. 0,92 Если имеющиеся в распоряжении корректирующие цепи имеют ЛАХ, только .приближенно соответствующие LKOp, то после расчета целесообразно для контроля построить переходную характеристику системы с учетом рассчитанного корректирующего звена, пользуясь методом трапецеидальных характеристик (см. стр. 59). Корректирующие параллельные цепи включаются в ниде элементов отрицательной обратной связи, охватывающих наиболее инерционные звенья системы. §1tux Рис. 21-65. Преобразование структурной схемы при наличии параллельной коррекции и - исходная схема; б - схема, в которой произведена замена параллельного звена эквивалентным W; е - результирующая (расчетная) схема. В качестве параллельных стабилизирующих цепей чаше всего используются: дифференцирующее звено (см. рис, 21-32); а также звенья, состоящие из двух последовательно соединенных ячеек (двухзвенный RC-фильтр верхних частот) с параметрами RjC. R2C2 (см. табл. 21-1). При охвате звена W2 звеном отрицательной обратной связи №3 (рис. 21-65) расчет корректирующей цепи производится следующим образом. Соединение звеньев W2 и W3 заменяется эквивалентным звеном (рнс. 21-65,6) W2 W=~ , - - . Затем определяется переда- 1+23 точная функция разомкнутой системы WiW=WiWsWK, которую удобно представить в виде произведения звена с передаточной функцией W (система без коррекции) и звена с передаточной функцией эквивалентного последовательного корректирующего звена WK (рис. 21-65, в), как было описано ранее (стр. 40), причем W(p) = W1{p)Wi(p}i W =-=- к l+W2Ws 1 + А W2 W3 WB Определение частотных характеристик эквивалентного последовательного корректирующего устройства производится так, как было рассмотрено на стр. 40. Подбор параметров и вида параллельного корректирующего звена значительно сложнее, чем последонательного, и производится путем нескольких проб. Несмотря на это, параллельные корректирующие цепи находят в практике сравнительно широкое применение. При синтезе параллельных корректирующих устройств полезно иметь в виду следующее правило: для интервала частот, где спранедливо неравенство ИЪ(/ю)№з(/ю) > 1 (21-35) ЛАХ участка системы, охваченного обратной связью, равна взятой с обратным знаком ЛАХ параллельного корректирующего контура W3. Так, если в цепи обратной связи стоит фильтр нижних частот (дающий фазовое запаздывание), то в области частот, где выполняется условие (21-35), нроисходит опережение фазы, как если бы в систему была введена дифференцирующая цепь. Помимо рассмотренного метода анализа систем автоматического регулирования с помощью логарифмических характеристик иногда используют и другие: например, метод корневых годографов и стандартных коэффициентов. Метод корневых годографов. Об устойчивости и качестве процесса регулирования можно судить по расположению корней характеристического уравнения замкнутой системы и нулей передаточной функции. Рассматривая зависимость траекторий этих корней и нулей комплексного переменного р (корневые годографы) при изменении параметров, делают суждения об изменении показателей качества системы [Л. 1, 4, 7]. Метод стандартных коэффициентов. При использовании этого метода полиномы числителя и знаменателя передаточной функции замкнутой системы преобразуют к иормированиой форме путем изменения масштаба параметра преобразования Лапласа р. Подбирая определенным образом величины коэффициентов полученных поли- номов числителя и знаменателя передаточной функции, можно достичь желаемого вида переходных характеристик [см. Л. 1]. Для автоматических систем, описываемых уравнением третьего порядка, можно сравнительно просто получить достаточно подробную картину процессов. В этом случае уравнение преобразуется к нормированному виду и по диаграмме А. И. Выш-неградского (см., например, [Л. 1]) определяется вид переходного процесса, соответствующий данному значению параметров системы. 21-7. ТОЧНОСТЬ РАБОТЫ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОД ВЛИЯНИЕМ ВНЕШНИХ ВОЗДЕЙСТВИИ Ошибка воспроизведения В процессе работы система автоматического управления находится под влиянием разнообразных внешних воздействий, которые делятся на управляющие и возмущающие. К управляющим относятся воздействия, которые должны воспроизводиться (отрабатываться) системой с возможно большей точностью. К возмущающим (помехам) относятся воздействия, которые должны отсеиваться (подавляться) системой. Примеры управляющих и возмущающих воздействий приведены н табл. 21-4. Управляющие воздействия поступают на вход непосредственно в виде регулируемой величины или образуются и результате преобразования входных сигналов. Помехи поступают на систему вместе с входным радиосигналом или возникают вследствие уходов параметров элементон системы из-за изменения внешних условий. Любую следящую систему можно рассматривать как некоторый эквивалентный фильтр, на который поступают управляющие воздействия и помехи. Исходя из час-, тотных представлений, можно утверждать, что полоса пропускания системы по отношению к управляющим воздействиям должна выбираться возможно более широкой, в то время как для мешающих воздействий - возможно более узкой. Таким образом, требования к . полосе с точки зрения уменьшения общей ошибки протиноречивы. Точность работы системы определяется тем, насколько правильно воспроизводятся управляющие воздействия и насколько полно отсеиваются помехи. Количественно точность систем оценивается ошибкой воспроизведения 0вос, которая определяется как разница между желаемой величиной, которую должна воспроизводить система, и регулируемой величиной, которая имеется на выходе системы. Если внешние воздействия носят случайный ха- Таблица 21-4 Примеры управляющих и мешающих воздействий Тип системы Управляющие воздействия Помехи Система автоматической подстройки частоты Изменение частоты входного сигнала 1) Уходы частоты гетеродина и переходной частоты дискриминатора, вызванные изменением температуры, данления, нлажно-сти, питающих напряжений и т. д. 2) Помехи, поступающие на нход радиоприемника вместе с радиосигналом, вызывающие отклонения частоты гетеродина. Автом этический радиопеленгатор 1) Изменение углового положения пеленгуемого источника радионолн (например, направления на цель н радиолокации при ее перемещении) 2) Угловые колебания объекта (корабля, самолета), на котором установлен пеленгатор. 1) Помехи, поступающие на нход радиоприемного устройства, а также внутренние шумы радиоприемника 2) Случайные блуждания эффективного центра отражения от -.сложного подвижного объекта (угловые шумы) (см. стр. 197). 3) Разбалансировка усилителей постоянного тока или ламп фазового детектора, обусловленные изменением параметров усилительных элементов 4) Случайные изменения интенсивности радиосигналон, обусловленные сложной структурой отражающего объекта (амплитудные шумы) (см. стр. 198). 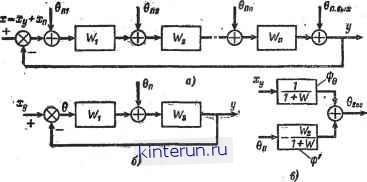 Рис. 21-66. Структурные схемы для вычисления ошибок воспроизведения. а - общая схема; б--схема для случая одного возмущающего воздействия: в - схема, иллюстрирующая образование ошибки воспроизведения. рактер, то ошибка воспроизведения также является случайной. При исследовании систем для упрощения анализа приходится несколько идеализировать характер внешних воздействий, считая, например, что они предстанляютея стационарными эргодическими процессами (см. т. 1, стр. 86). Для анализа таких процессов используется корреляционная теория, основными понятиями которой являются корреляционная функция и спектральная плотность (см. т. 1, стр. 87). Запишем ныражение для ошибки воспроизведения, когда в различные точки системы (рис. 21-66) поступают внешние воз- мущения 0п1, ©п2, ©пи и кроме того на вход системы вместе с управляющим сигналом* ху(г) воздействуют помехиxn(t) [т. е. x(t)=xy(t)+xn(t)]. Ошибка воспроизведения равна разности между управляющим воздействием xy(f) и выходной величиной y(t), т. е. ©вое = xy(t) - y(t). (21-36) Выражение для ошибки носпроизведения отличается от выражения для рассогла- * Здесь и дальше для удобства входной сигнал системы обозначается ж(<). выходной сигнал у It), рассогласование 6(0=ж(с) -j((0.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


