
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств где ыПр, us , ИдЦ и до - напряжения, отображающие гПр, ен, Гц и г0. Этому уравнению соответствуют функциональная и структурная схемы, изобра женные на рис. 27-33; причем Nn(D) и N0 (D) - передаточные функции измерителей Гц И Г0. Принципы построения координаторов с радионавигационными измерителями такие-же, как и подобных координаторов для систем управления по радиозоне. Однако между двумя этими группами координаторов имеется существенная разница. Она состоит в том, что в системах командного управления все измерения производятся на Земле, вследствие чего аппаратура УО заметно упрощается и в ряде случаев может представлять собой сравнительно простые и малогабаритные радиоответчики. в центре масс УО, а оси 00х3.о и 0oz3.0 параллельны осям системы Ocx3.cz3.t. Из геометрического построения с учетом того, что продольная ось 00Xi распрло- 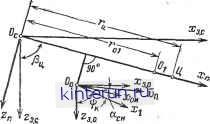 Рис. 27-34. Геометрические соотношения для доп-плеровского координатора. Координаторы автономных систем радиоуправления Координаторы автономных систем радиоуправления называют также автономными радиотехническими координаторами. Они включают лишь аппаратуру, установленную на УО. Для формирования параметров рассогласования эта аппаратура не получает сигналов ни с цели, на которую наводится УО, ни с пункта управления. Различают радиотехнические координаторы, основанные на использовании эффек а Допплера, радиовысотомеров, земных радиоориентиров, и комбинированные (комплексные) координаторы Координатор, основанный иа эффекте Допплера. Чувствительным элементом автономного радиотехнического координатора, основанного на использовании эффекта Допплера, является допплеровский измеритель путевой скорости vn и угла сноса асн (ДИСС). Описание схемы и анализ работы ДИСС - см. в § 25-4. Как известно, ДИСС формирует напряжения, пропорциональные Vu и асн. Для определения параметров рассогласования, характеризующих линейное отклонение центра масс УО от опорной траектории и оставшуюся дальность, помимо ДИСС координатор должен содержать курсовую систему, измеряющую курсовой угол фк управляемого объекта. На рис. 27-34 приведены геометрические соотношения, иллюстрирующие наведение УО В ГОрИЗОНТаЛЬНОЙ ПЛОСКОСТИ 0cX3.cZ3.c, где Ос - точка старта УО, а оси 0cz3.e и ОсХз.с образуют прямоугольную систему координат. При этом ось 0cz3.c совпадает с направлением на север. Положение цели Ц в земной системе координат 0cX3.cZ3.c задается углом рц и дальностью гп. Буквой 04 обозначена точка начала снижения УО. Параметры рассогласования для каналов бокового отклонения и оставшейся дальности измеряются в орто-дромической системе координат Осхи?и. Подвижная невращающаяся прямоугольная система координат 00ха 0za.0 имеет начато жена под углом асн по отношению к вектору,путевой скорости vn следует: t z = \ vn sin (фк + асн - рц) dt; (27-61) 6 г ос = г oi - J i>ncos (Фк+с-сн-Рц) dt. (27-62) О На основании этих соотношений можно получить функциональную схему координатора, показанную на рис. 27-35. Сигналы передатчика ПРД излучаются в направлении Земли антенной системой А. Приемник ПРМ служит для приема, усиления и преобразования по частоте сигналов, отраженных от Земли. С выхода приемника напряжение допплеровских частот подается на измерители угла сноса асн и величины путевой скорости i>n Напряжение, вырабатываемое измерителем аСн, управляет двигателем Дв, который через редуктор Ред поворачивает гиростаби-лизированную платформу ГС с закрепленной на ней антенной системой. Угол поворота гироплатформы равняется асн. В измерителе 1>п формируется напряжение, пропорциональное vn. Это напряжение подается на си-нусно-косинусный построитель. Выходным валом дифференциала ДФ2 положение щеток этого построителя изменяется на угол апт=фк+асн---Рц, где фк измеряется курсовой системой, а рц вводится перед началом движения УО. Угол аПт образуется с помощью дифференциалов ДФ4 и ДФг. Выходные сигналы синусно-косинусного построителя отображают подынтегральные выражения в (27 61) и (27-62). Напряжение uz, характеризующее z, вырабатывается интегратором Иъ а на выходе интегратора И2 создается напряжение и, отображающее второе слагаемое в уравнении (27-62). С помощью вычитающего устройства ВУ, на которое воздействую) сигналы и и uoi, где woi - напряжение, про порциональное rui, формируется параметр рассогласования, соответствующий г0с. Напряжения иг и иос служат для управления курсом УО и формирования команды (при гОс=0) на снижение УО. Погрешности рассматриваемого координатора складываются из ошибок ДИСС, курсовой системы и СРП. При этом систематические ошибки накапливаются с увеличением времени движения УО. ГС I Измеритель ускорения, двойное интегрирование которых позволяет находить линейные отклонения центра масс УО от опорной траектории и путь, проходимый УО вдоль опорной траектории. Для того чтобы инерциальная система осуществляла высококачественные измерения, гироплатформа в каждый момент времени должна быть нормальна местной Д&1 Измеритель Курсовая система Синусно-косинусный построитель Рис. 27-35. Функциональная схема допплеровского координатора. ПРМ - радиоприемник; ПРД - радиопередатчик; Ред - редуктор; Де - двигатель; ДФ - диффере?щиалы; И-интеграторы; ВУ ~ вычитающее устройство. Координаторы, основанные на использовании радиовысотомера, содержат радионавигационный высотомер, программное устройство, задающее высоту полета УО, и СРП, производящий вычитание сигналов, формируемых радиовысотомером и программным устройством. Подобный координатор, получающийся наиболее простым при наведении УО на постоянной высоте, целесообразен лишь при движении УО над гладкой поверхностью и пригоден только для управления в вертикальной плоскости. Координаторы, основанные на сравнении земных ориентиров, - картометриче-ские координаторы - содержат чувствительный элемент, позволяющий построить радиокарту местности, над которой движется УО; программную радиокарту, перемещаемую программным механизмом, и счетно-решающий прибор, осуществляющий сравнение двух радиокарт и преобразующий результаты сравнения в параметр рассогласования. В качестве чувствительного элемента наиболее целесообразно испотьзовать панорамную радиолокационную станцию. Комбинированные автономные координаторы представляют собой совокупность радиотехнических и нерадиотехнических датчиков информации. Известны радио-астроннерцальные и инерциаль-но-допплеровские координаторы. Основой всех этих координаторов являются инерциальные системы, содержащие акселерометры, которые устанавливаются на гиро-платформе. Акселерометры реагируют на вертикали. Для точного удержания гиро-платформы в этом положении используются радиосигналы небесных светил (в радно-астроинерционных координаторах) нли сигналы ДИСС (в инерционно-допплеровских координаторах). Одновременно сигналами ннерциальной системы могут корректироваться параметры радиотехнических измерителей. 27-6. УСТРОЙСТВА ФОРМИРОВАНИЯ КОМАНД Устройства формирования команд (УФК) применяются в системах командного радиоуправления и служат для выработки как непрерывных, так и разовых команд управления Ку. Последние предназначаются для выполнения операций типа включить - выключить . Понятие непрерывные команды характеризует выходные сигналы УФК, представляющие собой непрерывные или дискретные (импульсные) функции времени. Считается, что команда, передаваемая с помощью импульсов, является непрерывной, если процесс управления протекает практически так же, как и при представлении параметров рассогласования непрерывными функциями времени. Непрерывные команды подразделяются на знакопостоянные и знакоперемен-н ы е. По существу УФК выполняет функции счетно-решающего прибора (аналогового или цифрового), работающего автоматиче- ски под действием сигналов координатора или полуавтоматически, когда исходные данные в УФК вводятся оператором. Одно из основных требований, предъявляемых к УФК, заключается в формировании заданного кочичества и вида команд управления с необходимой точностью преобразования входных сигналов. В автоматических системах радиоуправления блок УФК может: вырабатывать сигналы, характеризующие изменение масштаба параметров рассогласования; вычислять производные и интегралы от параметров рассогласования; формировать сигналы, предназначенные для уменьшения динамических ошибок наведения и получающиеся в результате преобразования данных, которые поступают от измерителя координат цели; формировать разовые команды Эти операции выполняются либо все вместе, либо только те, которые нужны для получения необходимой устойчивости и трег буемых динамических свойств системы радиоуправления. Последняя чаще всего представляет собой замкнутую систему автома тического или полуавтоматического регулирования. Так, дифференцирующие цепи способствуют получению большей устойчивости системы управления, в то время как с помощью интеграторов возрастает точность процесса управления и устраняется влияние ухода нулей в различных элементах системы управления. Уменьшение ошибок управления интеграторами обусловлено повышением астатизма системы управления (см. § 21-4), а компенсация ухода нулей в системе связана с тем, что даже малое постоянное возмущение после интегрирования в течение некоторого времени становится значительным по величине и может быть воспринято органами управления УО. Элементы, которые должны входить в состав УФК, вырабатывающих непрерывные команды, выбираются в соответствии с решаемыми задачами. Формирование разовых команд осуществляется с помощью электро механических или электронных реле, срабатывающих при заранее заданных значениях параметров рассогласования. В неавтоматических системах управления устройство формирования команд принято называть датчиком команд или командным прибором. Датчиками команд (ДК), управляемыми ручками или кнопочными механизмами, осуществляется первичное преобразование воздействий оператора в сигналы, удобные для подачи на командную радиолинию управления. Получение знакопостоянных непрерывных команд наиболее просто осуществляется с помощью потенциометрических, емкостных и индуктивных датчиков команд (см. т. 2, разд. 19). Формирование знакопеременных команд производится датчиками дифференциального типа. Схема потенциометрического диф: ференциального датчика команд изображена на рис. 27-36. Ручка управления при пе-, редаче нулевой команды устанавливает движки / и 2 на линию АА, проходящую через средние точки потенциометров Rnl и /?П2. При передаче того или иного значения параметра рассогласования движки / и 2 отклоняются в разные стороны на одну и ту же величину Д/.  ., * чп к ручке- и управления Рнс. 27-36. Потенциометриче-скнй датчик команд. По аналогии с потенциометрическими ДК можно создать емкостные и индуктивные датчики дифференциального типа. Известны также так называемые коммутаторные дифференциальные датчики, которые обычно являются электромеханическими устройствами. ft ручке управления 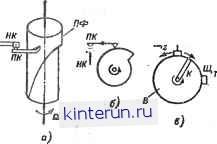 Рис. 27-37. Коммутаторные датчики команд. Принципиальная схема коммутаторного датчика, вырабатывающего сигнал в виде периодического замыкания контактов иа время, пропорциональное углу поворота Др ручки управления, представлена на рис 27-37, а. Профилированный вал ПФ, одно из сечений которого показано на рис. 27-37, б, вращается с постоянной угловой скоростью Q. Вдоль образующих этого ваа под действием ручки управления перемещается контактная система, состоящая из подвижного ПК и неподвижного контакта НК. Подвижный контакт соприкасается с валом ПФ, благодаря чему одну часть периода вращения ПК и НК оказываются замкнутыми, а другую - разомкнутыми. Время Т\ и и -Т% разомкнутого и замкнутого состояний ПК и НК зависит от того, на каком рас- .
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


