
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств движение УО относительно пункта управления определено заранее разработанной программой. Визирные устройства Переработка информации о координатах цели и УО в системах командного радиоуправления производится устройствами, называемыми иногда системами контроля или визирными устройства-м и Визирные устройства бывают оптические (с визуальным наблюдением), телевизионные, радиолокационные, радионавигационные, радиотелеметрические (включая и системы радиосигнализации) н комбинированные (комплексные). При этом комбинированные измерители представляют собой совокупность радиотехнических и нерадиотехнических датчиков, информации, корректирующих друг друга в процессе наведения УО. Применение того или иного измерителя зависит от решаемых задач и характера измеряемых параметров. В наиболее простых системах радиоуправления наблюдение за управляемым объектом осуществляется оператором непосредственно или с помощью оптических приборов. Для увеличения дальности наблюдения на управляемом объекте часто устанавливаются сигнальные огни. Оптические системы визирования характеризуются высокой разрешающей способностью и простотой технической реализации. Однако этим системам присущ ряд серьезных недостатков. Основными из них являются: небольшая дальность действия, ограничиваемая условиями геометрической видимости, а также зависимость работы от метеоусловий и времени суток. С увеличением дальности точность с которой определяется положение управтя-емого объекта по отношению к требуемому, ухудшается. Оптические измерители пригодны для измерения только внешних параметров движения управляемого объекта, т. е. для определения его координат, направления движения н т. д. Телевизионное визирное устройство состоит из двух частей, одна из которых (передающая установка) располагается на управляемом объекте, а другая (приемная установка) - на пункте управления (наблюдения). По изображению на экране приемной установки можно судить о состоянии управляемого процесса или положении управляемого объекта относительно окружа ющих его предметов. В отличие от оптической системы телевизионное визирное устройство позволяет контролировать как внешние параметры движения управляемого объекта, так и состояние различных агрегатов и процессов внутри этого объекта. Последняя задача может решаться следующим образом. Параметры процессов, которые необходимо контролировать, индицируются с помощью соответствующих приборов, расположенных на приборной доске. Изображение приборной доски с имеющимися на ней приборами передается по телевизионному каналу на пункт управления, где производится фотографирование или визуальный анализ изображений на экране приемной трубки. Возможна и непосредственная телевизионная передача информации о состоянии управляемого объекта и протекающих на нем процессах. Телевизионные системы используются в промышленности для контроля технологических процессов, наблюдение за которыми связано с неудобствами или же с опасностью для здоровья и жизни людей, в медицине, в диспетчерской службе на железных дорогах и т. д. За последние годы телевизионные системы получили Широкое распространение на космических кораблях и искусственных спутниках Земли для контроля за работой различных систем и агрегатов, наблюдения за состоянием космонавтов и т. д. Телевизионные визирные устройства отличаются наглядностью получаемого изображения и высокой разрешающей способностью, но недостаток их состоит в том, что качество получаемого изображения сильно зависит от метеоусловий и времени суток. Радиолокационные визирные устройства весьма широко используются для определения координат и других внешних параметров движения управляемых объектов. Особенно большое применение они находят в радиотехнических системах управления различными летательными аппаратами (самолеты, ракеты, космические корабли, искусственные спутники Земли). Как известно, радиолокационные станции могут быть автоматическими и неавтоматическими измерителями координат как управляемых объектов, так и целей. В системах радиоуправления основное применение находят автоматические РЛС. Автоматические и неавтоматические визиры, в свою очередь, делятся на два класса. Визиры первого класса характеризуются тем, что одна радиолокационная станция может определять координаты только одной цели нли одного УО. Каждая из радиолокационных станций, относящихся к визирам второго класса, способна измерять координаты нескольких УО. и нескольких целей в заданных секторах по углам наклона и азимута. В качестве визиров первого класса могут использоваться радиолокационные станции как с интегральным, так и мгновенным равносигнальными направлениями. Измерение координат визирами второго класса основывается на так называемом методе пачек. , Радиолокационные визиры УО, входящие в состав координаторов первого типа, работают обычно по сигналам ответчиков. Радиолокационные визиры координаторов второго типа подразделяются на п а с-снвные, полуактивные и актив-н ы е. Работа пассивных визиров основана на наличии радиоизлучения у всех прёдме- тов, которые имеют температуру, отличную от абсолютного нуля. Если на У О устанавливаются радиолокационный передатчик н приемник, то визир становится активным. Когда радиолокационный передатчик размещается вне УО, образуется полуактивный визир. С точки зрения веса и габаритов более целесообразны пассивные и полуактивные визиры. Однако дальность действия, пассив- ПГ Измеритель угла £ч Измеритель угла £0 I Визирное [устройство Вычитающее устройстве Потенциометр дальности или Счетно-решающий прибор 
Рис, 27-32. Координатор системы командного радиоуправле ния прн наведении по методу совмещения. а - функциональная схема; б - структурная схема. кых радиолокационных станции не превышает нескольких километров. Вследствие использования диапазона УКВ дальность действия радиолокаторов ограничивается условиями геометрической видимости, в пределах которой дальность действия определяется мощностью передатчика РЛС, направленностью антенной системы, чувствительностью приемника и эффективной отражающей площадью цели. Радионавигационные визирные устройства систем командного радиоуправления измеряют внешние параметры управляемых объектов на пункте управления. При определении этих параметров могут быть использованы угломерные, угломерно-дальномерные, дальномерные, разностно-дально-мерные и допплеровские радионавигационные измерители. Радиотелеметрические системы (РТС, в том числе и системы радиосигнализации) позволяют измерять и контролировать параметры различных процессов; причем радиотелеметрические системы позволяют получить высокую точность измерений. С помощью РТС могут определяться также и внешние параметры управляемых объектов. В связи с этим РТС оказываются удобными измерительными устройствами для значи. тельного числа типов систем командного радиоуправления. Системы передачи данных (СПД), используемые в координаторах для передачи информации с измерителей на пункт управления, строятся в соответствии с теми же принципами, что и многоканальные системы связи или многоканальные радиотелеыетри-ческие системы. Однако при тран-~- сляции радиолокационных сигналов без предварительной обработки требуются СПД с весьма широкой полосой пропускания. Счетно-решающие приборы и структурные схемы умножитель координаторов Счетно-решающие приборы (СРП), применяющиеся в координаторах систем командного радиоуправления, как и СРП систем управления по раднозоне, могут быть аналоговыми или цифровыми. В каждом конкретном случае состав СРП и решаемые им задачи определяются уравнениями рассогласования и заданными видами входных и выходных сигналов. Конкретный вид функциональной и структурной схем координатора также определяется уравнениями рассогласования и типами используемых измерителей и СРП. Если, например, применяются радиолокационные визиры н должно осуществляться наведение УО по методу совмещения, то, как это следует из уравнения рассогласования (27-36), необходимо измерить углы ец и е0 (или непосредственно их разность), а программное устройство должно вырабатывать сигнал, ха-
рактеризующии расстояние Гпр-Го. этом получается функциональная схема координатора, изображенная на рис. 27-32, а (без учета радиоответчика). Измерители углов ец и е0 формируют напряжения ип и ив, однозначно связанные с ец и е0. В СРП образуется напряжение Ды=Ыц-ы0, которое подается на электронный умножитель или потенциометр дальности, увеличивающий Аи в /Сп.дГпр раз, где Ки.л - коэффициент передачи умножителя или потенциометра дальности. В соответствии с изложенным можно написать следующее уравнение координатора, вырабатывающего напряжение uh, которое необходимо для наведения УО в вертикальной плоскости по методу совмещения: Uh - Кп.цГпр (ыц - щ). Данному уравнению удовлетворяет приведенная на рис. 27-32, б структурная схема. При этом передаточные функции Wn(D) и W0(D) характеризуют процессы, происходящие в радиолокационных измерителях углов вц и бо. Рассматриваемый координатор представляет собой систему с переменными параметрами. Это следует из того, что гПр~ ~г0 является функцией времени. Подобные же функциональная и структурная схемы получаются и при иных типах измерителей. Для координатора, осуществляющего формирование параметра рассогласования в соответствии с уравнением (27-40) с учетом того, что Дпу определяется формулой  Счетно-решающий прибор Задающее устройства
Потенциометр I дальности или 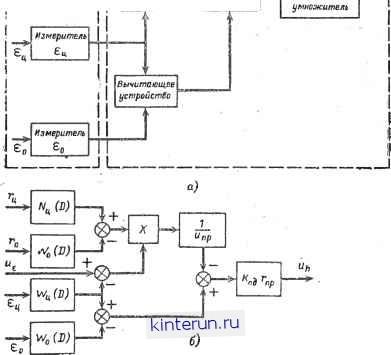 Рис. 27-33. Координатор системы командного радиоуправления прн наведе иии по трехточечиому методу параллельного сближения. а - функциональная схема; б - структурная схема. Зависимость напряжения иь. от расстояния ГоГдр, которое является функцией времени, необходимо учитывать при анализе системы радиоуправления в целом. Это объясняется тем, что координатор является одним из составных звеньев внешнего контура управления (см. § 27-1). (27-41) и что гПр=г0, можно получить следующее уравнение: кй = Кп.дГпр ц - о----~ X L пр X (ив -иц)
|
||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


