
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ла, канал измерения дальности и счетно-решающий прибор СРП. Дальность г0м между маяком и УО измеряется по времени между моментами излучения запросного импульса и приема ответного импульса. Синхронизация запросчи-ка и запуск фантастрона дальности в канале измерения гом осуществляются от одного синхронизатора, размещенного в канале измерения дальности. Положение ответных импульсов сравнивается во временном различителе с положением пары селекторных импульсов, сформированных из среза импульса фантастрона дальности. При наличии рассогласования между осями ответного и селекторных импульсов вырабатывается сигнал ошибки, воздействующий на управляющее устройство, роль которого выполняет электродвигатель и связанный с ним потенциометр. Напряжение потенциометра управляет длительностью импульса, формируемого фантастроном дальности. в процессе работы при помощи фантастрона дальности достигается совпадение осей ответного и селекторных импульсов. Вследствие этого напряжение на потенциометре управляющего устройства будет представлять собой аналог расстояния гом. Принцип измерения угла состоит в определении фазы огибающей у принимаемых импульсов по отношению к фазе опорного сигнала. Поэтому канал измерения угла во многом подобен угломерному радионавигационному измерителю. Поскольку географические координаты точек старта Ос, пункта управления (маяка) Ом и изменения опорной траектории в вертикальной плоскости (перевода УО на снижение) Oi известны, то по карте или путем расчетов могут быть найдены исходные данные для наведения. К ним относятся угловые координаты рц и Boi цели и точки О] а также расстояния roi, Гсм и Г01М В ГорИЗОНТалЬНОЙ ПЛОСКОСТИ 0сХз.с2з.с (рис. 27-27). Помимо того, считается известным минимальное расстояние гх от пункта управления 0 до осн Осхи, проходящей через точки старта Ос и цель. Это расстояние определяется по карте или рассчитывается по формуле П =г01м sin- (6ц - Poi). На УО измеряется дальность гом между цунктом управления Ом и УО, центр масс которого на рис. 27-27 обозначен точкой 00. При этом предполагается, что наклонная дальность между точками Ом и 00 и ее проекция на горизонтальную плоскость практически совпадают. Если указанное условие не выполняется, то гом может быть вычислена по известной высоте полета УО и наклонной дальности от точки Ом до точки 00. Помимо того, на УО измеряется угол ро. Из рис. 27-27 следует, что боковое отклонение z центра масс УО от опорной траектории ОсД равно: г = гом sin(Bn - Ро) - (27-54) . а оставшаяся дальность гос составляет: Гос = г01 cos(Pn - Poi) - - гом cos(Рд- Ро). (27-55) Формулы (27-54) и (27-55) определяют программу работы СРП, предназначенного для вычисления параметров рассогласования г 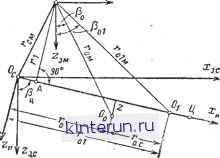 Рис. 27-27. Геометрические соотношения для утлс мерно-дальномерного координатора. и гос. На выходе СРП получаются приборные.аналоги иг и ц0с параметров рассогласования 2 И Гос: uz - ом sin (рци - Рои) - иг; Кос = о1м COS (Рци - Рош) - - Мом COs(PnH- Рои), где щ, ом и мот - приборные аналоги расстояний Г Гом И Г01М; Рощ, Рои И Рци - приборные аналоги углов Poi, ро и рц. Счетно-решающий прибор, осуществляющий получение напряжений иг и иос, может быть выполнен по самым разнообразным схемам [Л. 1]. Рассмотрев принцип действия угломер-но-дальномерного координатора, можно сделать вывод: с помощью одного комплекта наземной аппаратуры можно осуществить наведение нескольких УО. Для этого необходимо лишь ввести в СРП управляемого объекта соответствующие исходные данные. Точность работы такого координатора зависит от ряда факторов. Она определяет1 ся прежде всего точностью расчетов и ввода исходных данных. Кроме того, на ошибки координатора влияют инструментальные погрешности устройств, формирующих текущие значения параметров рассогласования. Наконец, точность зависит от ошибок измерения дальности гом и угла ро, обусловленных наличием флуктуаиионных составляющих в принятом сигнале (шумы прием--ных устройств) и внешних радиопомех. Эти ошибки могут быть сведены к минимуму. Дальномерные координаторы служат для определения местоположения УО путем измерения расстояния между УО и двумя наземными пунктами, координаты которых известны с высокой точностью. Наземный комплекс такого координатора состоит из станций А и Б (рис. 27-28). Каждая из этих станций, расположенных на расстоянии гс друг от друга, содержит антенную систему, приемник ПРМ1 запросных сигналов и ответчик ПРДи В состав аппаратуры УО входит передатчик запросных сигналов ПРД2, управля \~Станци,я А прд, прм, \Станция Б \ /~~ прд1 ПРМ, ПРМ, Задача об определении параметров рассогласования uz и ос для каналов бокового отклонения и оставшейся дальности применительно к дальномерному координатору решается неоднозначно, т. е. тожет быть предложено несколько разновидностей формул, характеризующих uz и и0с. Поэтому приведем лишь один возможный вариант уравнений рассогласования, когда онн сво- Синхранизатар канал измерения дальности г. канал измерения дальности г. I I Аппаратура У0 j Рис. 27-28. Функциональная схема дальномерного координатора. емый синхронизатором, приемник ПРМ2, два канала измерения дальности и счетно-решающий прибор СРП. В импульсных дальномерных системах расстояния гА а гБ, характеризующие удаление УО от наземных станций А и Б, измеряются по запаздыванию ответных сигналов от станций Л и £ по отношению к моменту излучения запросного импульса. Для систем с непрерывным излучением целесообразным является фазовый метод измерения дальности, при котором расстояние между передатчиком и приемником оказывается пропорциональным разности фаз запросных и ответных несущих (или поднесущих) колебаний. Величинами, которые известны до старта УО, являются: расстояние Гб между станциями А и Б (база системы), расстояния от каждой из станций А и Б до точки Ос старта УО и до точки Оь где должна изменяться опорная траектория УО в вертикальной плоскости (например, должно начинаться снижение УО). Помимо того, известно расстояние между точками Ос и Ои а также угол Вп, характеризующий направление опорной траектории ОсЦ- Измеряемыми величинами в процессе наведения являются расстояния гА и гБ. Геометрическая иллюстрация процесса наведения УО в горизонтальной плоскости показана на рис 27-29, где, как и раньше, точкой 00 обозначена проекция- центра масс УО на горизонт тальную плоскость 0сх3.с2а.с. дятся к аналогичным уравнениям угломерно-дальномерного координатора. Для того чтобы можно было записать уравнения рассогласования в форме (27-54) и (27-55), необходимо угол В0 выразить через известные и измеряемые величины, а расстояния гом, г1 и г01м заменить на гА, r01ASin(B4-В01) и r0iA соответственно. На основании рис. 27-29 можно найти, К = Рб-2arcte v-r (27 Б6> 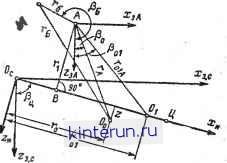 Рис. 27-29. Геометрические соотношения для даль номерного координатора. где 6 Б - угол, характеризующий положение станции Б относительно оси Л2ад, параллельной прямой Ос = 2з.с; Р = 0,5(гА+гБ+гб); (27-57) {р~га) (р - гб) [р - гб) (27-58 При реализации СРП, выполняющего операции в соответствии с формулами (27-56)-(27-58), координатор с дальномер-ными радионавигационными измерителями позволяет осуществлять одновременное наведение УО по ортодромическим траекториям, расположенным произвольно относительно базовой линии АБ. Однако структура СРП при этом получается весьма сложной. Ее существенное упрощение имеет место лишь при наведении УО по опорной траектории, проекция которой на горизонтальную плоскость проходит через центр базы АБ по иорчали к ней или представляет собой окружность с центром в точке А или Б (рис 27-29). Если движение УО происходит по прямой, нормальной к отрезку АБ и проходящей через его середину, то гос rы V г. 5,-0,25,2, где roi-расстояние от центра масс УО до середины отрезка АБ. При движении УО иа заданной высоте по окружности с центром в точке А 2 = Г АО -Га! где тАо - заданное значение расстояния от УО до станции А; ,£о - расстояние от станции Б до УО, которое соответствует точке изменения опорной траектории в вертикальной плоскости. В заключение отметим, что дальномерные координаторы обеспечивают высокую точность формирования параметров рассогласования. Разностно-дальиомерные координаторы используют гиперболические (разностно-дальномерные) системы радионавигации. Гиперболическая система состоит из аппаратуры, установленной на УО, н двух пар наземных станций Аи Б{ и Л2, Б2, расположенных в различных точках. Каждая пара наземных станций, работая синхронно между собой, излучает импульсы со стабильной частотой повторения на несущих частотах fi и )г. С помощью аппаратуры, установленной на УО и состоящей из приемников Аф\ и Л2£2, предназначенных для приема сигналов станций Ль Si и Л2, Б2, а также счет но-решающего прибора СРП, эти импульсы принимаются и измеряется разность време- -ни Дт! и Дт2 прихода импульсов от одной и от другой пар наземных станций. Величины Ati и Дт2 пропорциональны разностям расстояний Д,1=,Л1-гБ1 и &.г2=гА2-,£2. где rAvrA2rBi и ГБ2-расстояния от УО до станций Аи А2, Б\, Б2 соответственно. Линии постоянных разностей расстояний от двух точек на плоскости представля- / ют собой семейство гипербол. Поэтому положение УО с помощью разностно-далыю-мерной радионавигационной системы определяется как точка пересечения двух гипер- бол, каждая из которых соответствует измеренному значению разности расстояний. . Функциональная схема координатора, построенного на базе разностно-дальномер-ной радионавигационной системы, представлена на рис. 27-30. Каждая из наземных Аппаратура станции, А-)
Приемник Aj£) Приемник AgSg f~Annapomupo станции Передотч j аппарату j Аппаратура УО Синхронизатор Приемник \ Аппаратура [ j станции А%\ f% г.-----1 \Аппаратура\ j станции f Рис. 27-30. Функциональная схема разностно-дальномер-ного координатора. станций содержит синхронизатор, приемник, передатчик и антенную систему. Согласование работы двух станций, образующих пару, достигается тем, что одна из них, называемая ведущей, синхронизирует другую - ведомую. Передатчик ведущей станции вырабатывает радиоимпульсы, частота следования которых строго стабилизирована син-
|
|||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


