
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств ей где К - коэффициент передачи интегратора. На выходе вычитающего устройства образуется сигнал, равный разности напряжений, формируемых интегратором и гиродатчиком. Этот сигнал воздействует иа устройство привода антенны, под которым здесь понимается двигатель, охвачен- Для напряжения иус получается следующее выражение: , *n.yffrPP + l) Гпр D* + D+Kn.yK Knp TwD) пр D* + D + Кп.у Ка Кпр д. (27-47) Пеленеацианное устройство
Устройство npugoSa Гиродатчик
ТпрВ+1 Рис. 27-20. Функциональная и структурная схемы угломерного устройства системы самонаведения при применении позиционной коррекции. а - функциональная схема; б - структурная схема. ный обратной связью. Угол поворота двигателя относительно продольной оси УО в вертикальной плоскости равняется уи, а напряжение ус, действующее на входе интегратора, характеризует производную по времени от напряжения, вырабатываемого пеленгатором. Учитывая, что передаточная функция устройства привода рассматриваемого типа равна Wup (D) = -- Р , где /Спр и Гпр - * up Г* коэффициенты передачи и постоянная времени устройства привода, на основании рис. 27-20, б получим: дед= К* К - 7* D - 1 пр пр ТПр D- + D + Кп.у КИ КПр Ф. (27-46) Из выражения (27-46) следует, что при К$Кпр = 1 ошибка Двд в установившемся режиме (при £>=0) не зависит от угловых колебаний УО. В переходном же режиме прн К $Кпр = 1 на Д0д влияет лишь вторая производная от угла © по времени, которая имеет незначительную величину. Следовательно, сведение позиционной коррекции существенно развязывает движение РСН от угловых колебании УО без расширения полосы пропускания следящего измерителя. Анализ выражения (27-47) приводит к выводу о том, что ыуС будет зависеть только от е лишь в тех случаях, когда /С§/(пр=1 н 7пр=0. Условие 7VP=0 означает необходимость наличия безынерционного устройства привода, что практически невозможно. Однако выбором величины Гпр и коэффициента передачи радиотехнического измерителя по скорости /Сп.уЛиАпр можно добиться допустимого влияния, функции ©(г) на напряжение %0. Комбинированные измерители со скоростной коррекцией строятся по схеме, приведенной на рис. 27-21, а. В этом измерителе гиродатчик, состоящий из скоростного гироскопа и потенциометра, устанавливается на антенне и реагирует иа изменение угла между РСН и осью х3.0 (рис. 27-9). На выходе вычитающего устройства образуется разность напряжений, вырабатываемых пеленгатором и гиродатчиком. Под действием этого напряжения осуществляется работа устройства привода (двигателя), связанного с антенной системой пеленгатора. Перемещение устройства привода и антенны относительно продольной оси УО происходит до тех пор, пока РСН не совпадает с линией визирования. Структурная схема, отображающая процессы в измерителе сс скоростной коррекцией при сопровождении нм цели в вертикальной плоскости, представлена на рис. 27-21,6. На этой схеме передаточные функции №[(£>), W2(D) и WAD) характеризуют пеленгатор, который, как будет показано в дальнейшем, может быть сделан сравнительно инерционным, устройство привода антенны и гиродатчик - соответственно. Из сигнала уи может быть сформировано напряжение, отображающее параметр рассогласования при прямом методе наведения, а напряжение иуо, вырабатываемое пеленгатором, характеризует, как это будет показано далее, угловую скорость линии визирования. Этот же параметр отображается и напряжением ыус. Определяя на основе структурной схемы ошибку Д0Д, получаем: Д0 = l + Wt(D)Wa(D) Д l+W2 (D) W3 {D)+W1 (D)W2(D) --=---т>. (27-48) как на первое слагаемое влияет и коэффициент Кг. Для напряжения иуо находим: УУ1(Д)[1 +Wt(D) Ws(D)] 1 + Wt (D) W2(D)-\-W2(D)W3(D) WiW a 1 +Vt (D) V, (D)+W2 (D) W8(D) Если передаточные функции Wl(D), W2(D) и W3(D) выбрать так, чтобы W2(D)W3(D) 1 и Wl(D)W2(D)>Wi{D)W3(D), то иус =U73(D)e. Г ироватчик - Тогда даже при сравнительно узкой полосе пропускания пеленгатора, который может быть инерционным звеном, W2(D)=Knn/D и W3(D)=Kr(D) получим: Пеленга - цианное устройство -т - 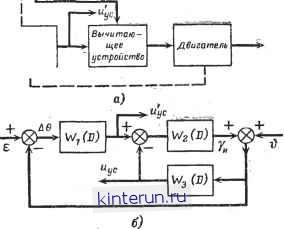 (27-49) Из выражения (27-49) следует, что соответствующим выбором коэффициента КЯъ можно обеспечить необходимую точность измерения = угловой скорости Е. Если в соответствии со структурной схемой, изображенной на рис. 27-21, б, найти иус, то получим: Рис. 27-21. Угломерное устройство системы самонаведения при применении скоростной коррекции. а - функциональная схема;1 6-структурная хёма. Wi (D) W2 (£>) W3 (D) \+W1(D)W2(D)+W2(D)W3(D W3(D) l+W1(D)W2(D) +W2{DWs(D) XT). Из этого выражения видно, что независимо от вида передаточных функций WD), W2(D) и W3(D) угловые колебания УО всегда будут влиять на ошибку Д0Д. Однако соответствующим выбором параметров у указанных выше функций можно добиться того, что слагаемое, связанное с &, будет играть незначительную роль. Так, при Wi(D)=Kn.y, W2(D)KaB/D и W3(D) = =ЛгД где Кт-коэффициент передачи гиродатчика, иайдем, что лед=-1+*гУдв-ё- ---! Ь. Кда KrD+D + Kn.yK№ Отсюда следует, что в установившемся режиме величина второго слагаемого существенно зависит от Лп.у и Кцв, в то время Б тех случаях, когда W2(D)W3(D) >1 и W,(D)W2{D) WS(D)W3(D), a W2(D) = =AW£> и W3(D)=KrD, UVB = Кг Н----!). уо Wi(D)K№ Отсюда также видно, что применением скоростной коррекции при соответствующем выборе передаточных функций Wt(D), W2(D) и W3(D) можно обеспечить практически зависимость Иус только от е. Следящие измерители с гироскопическим приводом позволяют еще в большей степени развязать движение антенны и колебания УО вокруг его центра масс. Это обычно достигается применением гироплат-форм с силовой разгрузкой. Гироскопический следящий измеритель угловых координат и угловой скорости линии визирования (измеритель с гироприво- дом) строится по схеме, приведенной на рис. 27-22, а. Антенная система А пеленгатора с помощью тяг соединена с платформой, образованной рамками 1 и 2. Движение этой платформы происходит под действием сиг- грузки, включающей гироскопы Г\, Гг, потенциометрические датчики Д4, Д2 и разгрузочные двигатели Дв±, Де2 Система силовой разгрузки работает так. При действии внешнего момента М2 Приемник и вы ходное устройстве 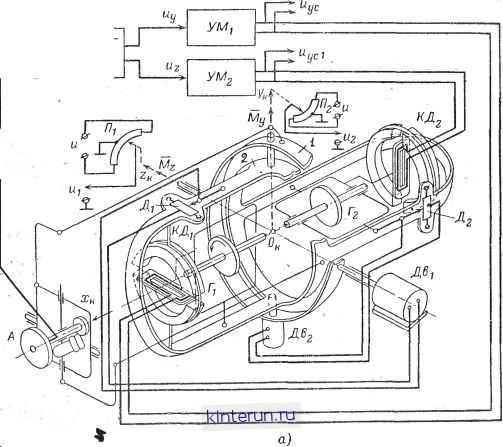 Рис. 27-22. Гироскопическое угломерное устройство системы самонаведения. а функциональная схема; б - структурная схема. налов пеленгатора и не зависит от угловых колебаний УО. Последнее достигается применением системы силовой раз- (например, из-за вращения УО) гироскоп /\ начинает прецессировать вокруг вертикальной оси, стремясь совместить вектор своего кинетического момента, направленного вдоль оси вращения ротора, с вектором возмущающего момента М2. При повороте рамки гироскопа относительно платформы с датчика Д\ снимается напряжение, пропорциональное углу поворота рамки гироскопа Г,. Под действием этого напряжения двигатель Де4 развивает момент, направленный в сторону, противоположную Мг. Прецессия гироскопа Д продолжается до тех пор, пока внешний момент не уравновесится моментом двигателя Дви Благодаря этому положение платформы остается неизменным. При устранении внешнего момента компенсировавший его ранее момент разгрузочного двигателя вызовет прецессию гироскопа Г1 в противоположную сторону. По мере обратной прецессии гироскопа А момент двигателя Дв1 уменьшается и становится
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


