
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств Все другие двухточечные методы наведения, в том числе и метод пропорционального наведения, основанные назадании параметра рассогласования, определяющего угол упреждения Бектора скорости УО относительно вектора г, являются промежуточными Метод пропорционального наведения требует, чтобы угловая скорость вращения вектора скорости УО была пропорциональна угловой скорости вращения линии УО - цель. Поэтому параметр рассогласования Аи.п для вертикальной плоскости равен: = се -в, (27-30) а- коэффициент пропорциональности, называемый иногда навигационной постоянной. Первый и второй члены в правой части уравнения (27-30) характеризуют требуемое и действительное значения регулируемой величины соответственно. Для другой плоскости управления получается уравнение рассогласования, подобное (27-30), из которого следует, что в состав координатора, определяющего Дп.н, должны входить два типа измерителей: один из ннх должен измерять угловую скорость е, а другой - 0. Учитывая кинематическое уравнение (27-29) и уравнение рассогласования, построим структурную схему (рис. 27-12), с помощью которой иллюстрируется .процесс формирования Дп.н. Схемы, изображенные на рнс. 27-11 и 27-12, отличаются только тем, что безынерционное звеио в контуре наведения имеет коэффициент передачи не 1/г2, как на рис. 27-11, а а/г2 и что из сигнала ае вычитается угловая скорость 0. Опорные траектории при пропорциональном наведении получаются более криволинейными, чем при методе параллельного сближения. Однако, если а =3-5-5. то при обоих методах требуются практически одинаковые перегрузки. Создание же системы радиоуправления, в которой осуществляется преобразование ев ае, с коэффициентом пропорциональности, равным 3-5, не представляет каких-либо принципиальных трудностей. В связи с тем, что метод чистого параллельного сближения неосуществим, метод пропорционального наведения при а= =3-5-5 может рассматриваться как практически реализуемый метод, близкий по своим свойствам к методу параллельного сближения. Поэтому при наведении УО на быстро перемещающиеся и маневрирующие цели метод пропорционального наведения, исторически появившийся позже метода параллельного сближения, является наиболее целесообразным. В заключение отметим, что при идеальном пропорциональном наведении, когда ае=©, потребное нормальное ускорение определяется формулой jn=ave. Важно также отметить, что из равенства ае=0 при с=оо вытекает уравнение идеальной связи для метода параллельного сближения. Если в том же равенстве ае=0 положить а=1 и считать, что начальный угол упреждения он=0, то получается уравнение идеальной связи Дф=о=0, характеризующее флюгерный метод наведения. Действительно, в результате интегрирования уравнения ае=<я> получим: СБ = © + Он. Отсюда при а=1 и он=0 следует, что о= = 8-0 = 0. Прямой метод наведения требует, чтобы в течение всего времени наведения УО его продольная ось совпадала с линией УО - цель. В соответствии с этим определением параметр рассогласования Дпр для вертикальной плоскости задается следующими уравнениями, получающимися на основе рис. 27-9:  Ддр = Y, Дцр = е - i (27-31) (27-32) 27-12. Структурная схема образования параметра рассогласова пня при методе пропорционального наведения. Подобные же уравнения можно найти и для другой плоскости управления. Из выражений (27-31) и (27-32) слеует, что ДПр может быть определен либо путем непосредственного измерения угла у, либо раздельным измерением углов е и t> с последующим вычитанием результатов измерения. Технически более просто реализуется координатор, выполняющий непосредственное измерение у. Структурная схема, иллюстрирующая процесс формирования ДПР, получается на основе уравнений (27-23) и (27-32) и имеет вид, представленный на рис. 27-13. Сравнение между собой рис. 27-13 и 27-10 показывает, что они различаются только углами & и ©, вводимыми в вычитающее устройство на выходе звена с коэффициентом передачи, равным 1/г. При прямом методе регулируемой величиной является направление продольной оси УО, а его траектория определяется направлением вектора скорости, который в общем случае не совпадает с продольной осью.  Поэтому опорная траектория УО даже при неподвижной цели представляет собой довольно сложную кривую, называемую гиперболической спиралью. Кривизна гиперболической спирали возрастает по мере уменьшения т. Когда радиус кривизны опорной траектории становится меньше минимального радиуса разворота 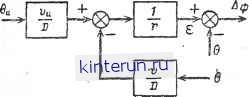 Рис. 27-13. Структурная схема образования параметра рассогласования при прямом методе наведения. Рмип управляемого объекта, полет по спирали оказывается невозможным и УО начинает перемещаться по окружности радиуса рмин. Отсюда следет, что при прямом методе наведения УО даже на неподвижную цель с помощью идеально работающей системы управления, встреча УО с целью невозможна (если, конечно, вектор скорости V и продольная ось УО не совпадают друг с другом). Ошибки наведения зависят от начальных ошибок пуска УО, величины рЮня и начальной дальности гш между УО и целью. Они возрастают с уменьшением гв и увеличением рлин и начальных ошибок пуска. Однако по своим свойствам прямой метод достаточно близок к флюгерному. Это объясняется тем, что углы атаки и скольжения (под углом скольжения понимается угол между проекциями вектора воздушной скорости и продольной оси УО на горизонтальную плоскость) сравнительно малы (у летательных аппаратов с аэродинамическими рулями) или равны нулю (у баллистических ракет, летающих вне атмосферы, космических кораблей и т. д.). В то же время прямой метод наведения технически реализуется более просто, чем флюгерный. Поэтому прямой метод может быть признан целесообразным при наведении У О на неподвижные и малоподвижные цели, имеющие сравнительно большие размеры. Метод совмещения требует чтобы в пооцессе движения центр массы УО удерживался на линии, соединяющей пункт управления с целью. На рис. 27-14 показана невращающаяся система координат ОсХз.сУз.с расположенная в вертикальной плоскости. Начало ее Ос совмещено с пунк-том управления. Положение цели Ц определяется расстоянием ги и углом ец, а координатами центра масс 00 управляемого объекта являются расстояние га и угол е0. В соответствии с определением метода совмещения уравнения рассогласования могут быть записаны в одной из следующих форм. Дс.у = ец (27-33) Асу = ец - е0; (27-34) Дел = А; (27-35), Дел <-0(Ец-ео), (27<-36) где Дс.у и Ас.л - параметры рассогласования, характеризующие угловое и линейное откчоиения центра масс УО относительно вектора гц; при этом Дел отсчитывается от точки 00 по нормали к вектору г0.  Рис. 27-14. Геометрические соотношения при .тавелении по методу совмещения. Исходя из уравнений рассогласования (27-33)-(27-36), можно определить состав измерителей, которые должны входить в состав координатора. Так, при измерении параметра рассогласования в виде угла Sj на пункте управления возможны два варианта выполнения координатора. В первом варианте координатор содержит два угломерных устройства, одно из которых измеряет угол Вц, а другой - угол Е0- Разность, характеризующая ец-8с, вычисляется счетно-решающим прибором. В другом варианте координатор должен содержать устройство, измеряющее непосредственно угол Ej. При измерении параметра рассогласования Дс.у на УО одна часть аппаратуры координатора размещается на пункте управления, а другая - на УО. Аппаратура пункта управления в этом случае состоит из автоматического угломера, работающего в режиме конического сканирования и сопровождающего цель по угловым координатам. Этот угломер в пространстве создает равносигнальное направление, совпадающее при идеальной работе с линией пункт управления - цель. Аппаратура УО служит для измерения угла В], характеризующего положение центра масс УО относительно равносигнального направления. Если необходимо измерить линейное , отклонение УО от линии пункт управле- ния - цель, то для этого достаточно умножить измеренное значение угла ei, величина которого обычно мала, на расстояние г0 между пунктом управления и УО. Уравнения рассогласования для плоскости управления, перпендикулярной плоскости ОсХз.сУзс, по форме совпадают с уравнениями (27-33)-(27-36), если под ei и h понимать соответствующие параметры рассогласования, выраженные в угловых и линейных единицах измерения. Кинематические уравнения при методе совмещения, как и при любых других трехточечных методах наведения, характеризуют движение центров масс цели и УО относительно центра масс пункта управления. Анализируя кинематические уравнения, можно проследить процесс, определяющий образование параметров рассогласования Дс.у и Дс.л- Поскольку кинематические уравнения для различных плоскостей подобны, рассмотрим лишь случай, когда пункт управления Ос, управляемый объект 00 и цель Ц (рис. 27-14) движутся в одной плоскости. При этом будем считать, что точки Оо, Ос и Ц перемещаются со скоростями v, vc и Оц, векторы которых v, vc и vn расположены относительно оси Ос#з.с под углами G, Gc и 0ц (рис. 27-14). Тогда, проектируя векторы vc и v на вектор г0 и нормаль к нему, а векторы vc и \ц на вектор гц и прямую перпендикулярную к Гц, получим следующую систему кинематических уравнений: йгц = Оц cos (ец - ©ц) - vc cos (ец - 0С); о0=е0-0, оц=ец-©ц, ос=ец-0с и Oic= =е0-©с, когда синусы этих углов могут быть заменены аргументами, а косинусы единицами. При этих условиях первая я вторая пары кинематических уравнений приводятся к следующим выражениям: Л(ГЦ 8ц) dt d (rD е0) dt = 00 - l>c 0r (27-37) (27-38) 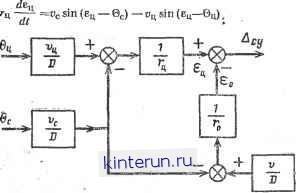 Рис. 27-15. Структурная схема образования параметра рассогласования при наведении по методу совмещения. -- = v cos (е0 - 0) - vc cos (е0 - ©е); = ос sin (ес - ©с) - v sin (е0 - 0). Для иллюстрации образования параметра -рассогласования Дс.у при.методе совме-.щения ограничимся случаем малых углов Если к выражениям (27-37) и (27-38) добавить уравнение рассогласования (27-34), то можно получить представленную на рис. 27-15 структурную схему, иллюстрирующую процесс образования параметра рассогласования при методе совмещения. Управляющими воздействиями при этом будут изменения углов @ц и ©с, характеризующих движение пункта управления и цели, а угол 0, определяющий наклон траектории УО, выступает как сигнал обратной связи. Изменения дальностей гц и г0 приводят к преобразованиям управляющих воздействий и параметров контура наведения соответственно. В отличие от двухточечных методов наведения, где звено, входящее в контур наведения и имеющее коэффициент передачи 1/г, увеличивало усиление системы по мере сближения УО с целью, при методе совмещения подобное же звено с коэффициентом передачи 1/г0 уменьшает усиление с приближением УО к цели. Структурная схема, поясняющая образование параметра рассогласования Дел, легко получается на основе схемы, показанной на рис. 27-15, если в ней добавить звено с коэффициентом передачи г0, на вход которого должен быть подан сигнал Дс.у. Следует отметить, что при использовании параметра рассогласования Дел коэффициент передачи контура наведения не будет зависеть от г0. Это является важным с точки зрения выбора параметров, при которых обеспечивается устойчивость системы управления. Для построения опорных траекторий необходимо решить полную систему кинематических уравнений с добавлением к ней уравнения идеальной связи Де.у=0 или Дс.л=0. Аналитическое решение этих уравнений в ряде случаев оказывается затруднительным. Поэтому часто целесообразно использовать метод графического определения опорных траекторий. Этот метод описан, например, в [Л. 1]. После того как опорная траектория, которая существенным образом зависит от движения цели и пункта управления, будет най-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


