
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств вырабатываются при Дг, А© и Ан, не равных нулю, команда на снижение ракеты формируется при Дг=0. Из выражений (27-1) - (27-4) видно, что наведение ракеты по траектории, показанной на рис. (27-6), будет возможно, если, помимо устройств, задающих программные параметры движения, в состав системы управления входят измерители боковых отклонений, высоты, угловых положений продольной осиракеты в плоскости Р0 и текущего наклонного 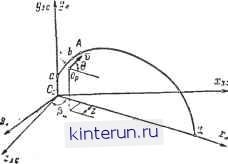 Рис. 27-7. К определению опорной траектории баллистической ракеты. расстояния от точки старта до ракеты. По результатам измерений вычисляются Д2, ДЯ, Дг и производятся необходимые воздействия на органы управления УО. Опорная траектория баллистической ракеты также располагается в вертикальной плоскости (относительно Земли) и состоит из двух участков: активного, представляющего собой небольшой отрезок всей траектории, который ракета проходит с включенным двигателем, и пассивного, где полет осуществляется с выключенным двигателем. Всю или большую часть пассивного участка ракета движется по расчетной баллистической траектории (траектории свободно брошенного тела). Для ракет ближнего действия баллистическая траектория близка к параболе (рис. 27-7). При этом оси 0сх3.с ОсЦз.с и 0с2з.с на рис. 27-7 образуют земную систему координат, которая была показана на рис. 27-6, а оси Осхи, ОсУп и 0С2И - измерительную систему координат, ось абсцисс которой проходит через точки старта Ос и цели Ц. Ракеты большой дальности действия, в том числе и межконтинентальные, летят по траектории, близкой к эллиптической кривой. Такая траектория представляет собой часть эллипса, один из фокусов которого расположен в центре Земли. Активный участок ОсА (рис. 27-7) траектории, в свою очередь, подразделяется на три части: стартовый участок Оса, участок управления ab и участок выключения двигателя ЬА. На стартовом участке ракета движется вертикально вверх, вследствие чего сокращается время ее прохождения через плот- ные слои атмосферы и уменьшается расход топлива на преодоление силы сопротивления воздуха. После того, как ракета достигает точки а, по командам системы управления продольная ось ракеты начинает поворачиваться в сторону цели и траектория искривляется. Когда величина и наклон вектора скорости ракеты достигают расчетных значений (в точке А), двигатель выключается и ракета переходит на пассивный участок АЦ. Из изложенного следует, что в процессе наведения баллистической ракеты необходимо: добиться совмещения центра масс ракеты с плоскостью ОсХиЬв на активном участке полета; выключить двигатель при достижении вектором скорости ракеты заданных величины и направления. В соответствии с этими требованиями и определяются параметры рассогласования, которые в последующем рассматриваются применительно к ракетам ближнего действия. Дальность полета ге баллистической ракеты ближнего действия при предположении, что отсутствует сопротивление воздуха, а Земля является плоской, может быть вычислена по известной из курса физики формуле, определяющей дальность полета брошенного тела: v sin 26н В (27-5) Здесь vn и вн - величина скорости и угол наклона ее вектора относительно горизонтальной плоскости в момент выключения двигателя ракеты. Из выражения (27-5) следует, что изменение ге достигается варьированием величины vR и угла наклона 6Н скорости движения УО и что при заданном значении ге должны быть достигнуты заранее заданные значения v и GH. Ошибка Дго наведения ракеты по дальности, определяемая как выраженный в приращениях полный дифференциал равенства (27-5), составляет: /Ди де \ Дгб = 2гб -JL + --J- , (27-6) \ г>ц tg 20н / где Дг)н и Д0Н - ошибки в установке значений vR и вн. Но, как это следует из формулы (27-5), максимальная дальность действия ракеты ближнего действия получается при 0Н=45С. Заметим, что траекторию ракеты при 0Я=45° иногда называют оптимальной, поскольку, двигаясь по ней, ракета перекрывает заданную дальнорть при минимально возможном расходе топлива. . При углах вн, равных или близких к 45°, роль второго слагаемого в выражении (27-6) пренебрежимо мала. Поэтому для управления дальностью полета баллистической ракеты можно использовать две функционально независимые системы. Одна из них должна вносить программное измене- ние угла наклона G вектора v по отношению к горизонтальной плоскости, а другая регулирует текущее значение скорости v. Программа изменения угла G, установка которого допустима со сравнительно большой ошибкой, составляется в соответствии с приблизительно известной закономерностью изменения величины скорости ракеты во времени. Вследствие этого к моменту выключения двигателя угол 0 достигает значения, близкого 6Н. Поскольку угол атаки, т. е. угол между проекциями продольной оси ракеты и ее вектора скорости на вертикальную плоскость, у баллистических ракет не превышает нескольких градусов, то угол наклона вектора скорости ракеты можно считать приблизительно равным углу наклона ее продольной оси к горизонту, т. е. углу тангажа. Тогда система измерения углового положения ракеты должна быть выполнена следующим образом. Спустя несколько секунд после старта, когда ракета выйдет на управляемый участок, . включается программный механизм, вырабатывающий программное изменение угла тангажа т>пр. С величиной т>Пр сравишается фактическое значение угла тангажа т>, измеряемого на ракете с помощью, например, гироскопического датчика. Тогда параметр рассогласования Дл в системе, предназначенной для управления углом #, будет равен: Как только параметр Д$ станет отличаться от нуля, должен формироваться управляющий сигнал, под действием которого будут перемещаться рули ракеты так, чтобы Д 9 стремился к нулю. Для системы, управляющей выключением двигателя ракеты, уравнение рассогласования имеет вид: Дт, = vn - v. (27-8) Величина v определяется системой измерения скорости, a vB задается перед стартом ракеты. При достижении равенства Д -О формируется команда на выключение двигателя. , Боковая коррекция баллистической ракеты осуществляется в соответствии с уравнением рассогласования (27-1). Рассматривая подобным же образом дальнодействующие баллистические ракеты, можно прийти к выводу, что параметры рассогласования для их систем управления качественно будут такими же. Однако законы изменения задаваемых воздействий будут отличаться, поскольку приходится учитывать кривизну Земли, ее вращение и т. д. При проектировании координаторов желательно иметь данные о характере изменения параметров рассогласования (хотя бы для наиболее типовых случаев применения ракеты). Эти данные могут быть получены в результате анализа кинематических уравнений. Существенным для параметров рассогласования, используемых в системах, ко- торые предназначены для наведения ракет по фиксированным траекториям, является то, что величины и знаки Д$ , Д2, Дн и Д зависят от параметров, связанных с траекторией УО, и от параметров, изменяющихся по программе. В частных случаях программные параметры - постоянные величины, в том числе равные нулю. При анализе параметров рассогласования УО можно рассматривать как точку, движущуюся в пространстве. Кинематические уравнения для ракеты, перемещающейся по нормалям к опорной траектории в вертикальной и горизонтальной плоскостях, имеют следующий вид: =v sin &v; (27-9) dz dt = vcos@v sin 6r, (27-10) где ©в - угол между направлением вектора скорости ракеты и его проекцией на горизонтальную плоскость (угол наклона траектории) ; ©г - угол между проекцией вектора скорости ракеты на горизонтальную плоскость и осью абсцисс измерительной системы координат. 1£сли угол наклона траектории мал, то На основании кинематического уравнения (27-11) и уравнения рассогласования (27-3) получается изображенная на рис. 27-8, а Н0 + л £н
Рис. 27-8. Структурные схемы образования параметров рассогласования при управлении крылатыми ракетами. а - для вертикальной плоскости; б - для горнзон. тальной плоскости. структурная схема, отображающая процесс формирования Дьг для системы управления крылатой ракетой на участке АВ ее полета (рис. 27-6). Заметим, что здесь и далее буквой D обозначается символ дифференцирования d/dt, о применении которого в выражениях для передаточных функций детально изложено в разд 21, 22. Учитывая, что фактическая траектория близка к опорной, прн малых 0 будем иметь: - vQr. (27-12) Структурная схема (рис. 27-8,6), соответствующая уравнениям (27-12) и (27-1), свидетельствует о том, что характер изменения величин Дн и Д2 будет найден, если при заданных законах изменения Нй и z0 станут изв естны зависимости v, 0 и 0Г от времени. Однако здесь возникает одно кажущееся затруднение, которое состоит в следующем. Определить закон изменения v, 0 и 0Г нельзя, не исследуя в целом систему управления как замкнутую систему регулирования. Отсюда как будто вытекает невозможность сформулировать требования к динамическому диапазону координатора до тех пор, пока система управления не спроектирована полностью. Выход из этого затруднения состоит в том, что обычно бывают известны некоторые предельные значения параметров, характеризующих действительную траекторию полета ракеты. В качестве таких параметров могут быть приняты максимальные значения располагаемых нормальных ускорений в вертикальной и горизонтальной плоскостях или максимальные коэффициенты поперечных перегрузок, определяемые отношениями максимальных нормальных ускорений к ускорению силы тяжести УО. Так, имея в виду, что коэффициент поперечной перегрузки пу ракеты в вертикальной плоскости равняется [Л. 1]: (27-13) d@D dt - нормальное ускорение ра- кеты в вертикальной плоскости, на основании уравнения (27 11) получаем: (27-14) Подобным же образом найдем, что d2z (27-15) v d6r коэффициент поперечной перегрузки в горизонтальной плоскости. Подставляя в выражения (27-14) к (27-15) максимальные значения пу и nz, нетрудно получить предельные величины параметров рассогласования Дн и Дг. Характер изменения угла t>, входящего в выражения (27-2) и (27-7), можно найти следующим образом. Известно, что Ф= = в + а, где а - угол атаки. Но из выражения (27-13) следует, что dt ~ v Поэтому d® gny da. dt ~ ~+ dt Задаваясь максимальными значениями ny, v и da/dt, легко найдем предельные характеристики dft/dt, а следовательно, и Д§ . Подобным же образом можно получить предельные закономерности для параметра рассогласования Дн. В заключение отметим, что наведение по фиксированным траекториям может осуществляться с помощью систем командного и автономного управления, а также систем управления по радиозоне. Параметры рассогласования и кинематические уравнения при наведегщи по нефиксированным опорным траекториям Методы наведения УО по нефиксированным опорным траекториям подразделяются на двухточечные методы, харак- теризующиеся тем, что в образовании параметров рассогласования участвуют только две-точки - УО и цель, и на трехто-чечные методы, основанные на том, что параметры рассогласования зависят от движения трех точек - УО, цели и пункта управления. Двухточечные методы наведения пригодны для систем самонаведения и командного управления второго и третьего видов, а трехточечные-для систем командного управления первого вида и систем управления по радиозоне. Среди двухточечных методов известными являются флюгерный метод наведения, метод наведения по кривой погони, метод параллельного сближения, метод пропорционального наведения (пропорциональной навигации) и прямой метод наведения. Из второй группы методов наведения можно назвать метод совмещения (метод накрытия) и метод параллельного сближения. Флюгерный метод наведения и метод наведения по кривой погони характерны тем, что в течение всего времени с линией визирования, соединяющей УО и цель, должны совмещаться вектор воздушной скорости v (при флюгерном наведении) или вектор истинной скорости (при наведении по кривой погони). Оба метода совпадают; когда УО движется в невозмущенной сре де (при отсутствии ветра). Флюгерный метод и метод погони дают приемлемые результаты лишь при наведении УО~.на малоподвижные и неподвижные цели. Основные геометрические соотношения, иллюстрирующие наведение УО в вертикальной плоскости по флюгерному методу, приведены на рис. 27-9. Вектор v управляемого объекта, обозначенного точкой 0о,
|
|||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


