
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств обеспечивается автоматическое определение параметров заданной траектории движения УО. Функциональная схема системы т р е т ь е го вида, которая может быть и автоматической и полуавтоматической, показана на рис. 27-4, в. Кинематическое звено преобразует самостоятельные (абсолютные) перемещения пункта управления и УО в относительное движение этих объектов. Последнее воздействует на координатор, который в автоматических системах содержит измеритель координат УО относительно пункта управления и счетно-решающий прибор, выдающий необходимые сигналы рассогласования. Под действием выходных сигналов координатора устройство формирования команд вырабатывает команды, которые с помощью командной радиолинии управления передаются на исполнительное устройство управляемого объекта. Если система полуавтоматическая, то измерители координатора связываются с индикаторами, в результате наблюдения за которыми оператор формирует нужные команды управления. Эти команды по каналу КРУ поступают на исполнительное устройство УО. Управляемый объект перемещается так, чтобы параметры рассогласования имели значения, близкие к нулю.- Помимо управления движением УО иногда требуется изменение режимов работы его аппаратуры: включение и выключение телевизионного передатчика, передающего устройства радиотелеметрической системы и т. д. Может также возникнуть необходимость командного радиоуправления состоянием самого управляемого объекта. Для решения этих задач пригодны рассмотренные выше системы командного радиоуправления первого и второго видов, но функциональные схемы их несколько видоизменяются. Так, в системе командного радиоуправления первого вида (рис. 27-4, а) исключаются цель и кинематические звенья, а измеритель координат цели заменяется программным устройством. Это устройство должно вырабатывать сигналы, характеризующие заданные состояния УО или режимы работы его аппаратуры в каждый момент времени. Одновременно осуществляется замена измерителя координат управляемого объекта устройством, контролирующим действительные состояния УО или режимы работы его аппаратуры. В схеме на рис. 27-4, б необходимо изъять цель и кинематическое звено. Все остальные элементы, изображенные на рис. 27-4, а, б, остаются. Однако при решении каждой конкретной задачи функции оставшихся элементов могут несколько отличать- ся от тех, которые необходимы при управлении движением. Одновременно следует отметить, что понятие координатор для таких систем теряет смысл. Автономные системы управления Автономные системы управления бывают нерадиотехнические и радиотехнические. Среди радиотехнических автономных систем управления - автономных систем радиоуп- Программа движения Дополнительные сигналы управления
 Параметры движения YD , Координаты центра масс управляемом объекта Рис. 27-5. Функциональная схема автономной системы р адиоупр авлення. равления - различают системы, основанные на использовании радиовысотомера и эффекта Допплера, радиоаст-роиавигационные системы и системы управления по земным радиоориентирам. Сущность построения автономных систем управления сводится к следующему. На управляемом объекте устанавливается устройство, нырабатывающее программу движения УО в заранее выбранной системе координат. Параметры, характеризующие текущий режим движения УО, определяются измерителем координат УО (но без использования сигналов пункта управления или цели) и с помощью счетно-решающего прибора сравниваются с программными (заданными) значениями этих параметров. На основании сравнения формируются управляющие сигналы, под действием которых текущие значения параметров оказываются соответствующими заданным. Типовая функциональная схема автономной системы радиоуправления, которая может применяться при наведении на неподвижные цели управляемых летательных объектов, представлена на рис. 27-5. Сведения о заданном режиме движения УО вводятся в счетно-решающий прибор, а кинематическое звено связывает угловые перемещения УО с движением его центра масс. Анализ функциональных схем, приведенных в данном параграфе, показывает, что.системы радиоуправления представляют собой достаточно сложные системы автома- тического или полуавтоматического р гули-рования. Эти системы содержат так называемый внешний или большой контур регулирования (контур наведения), входным воздействием для которого является движение цели. Обратная связь во внешних контурах замыкается через кинематические звенья. Помимо того, может быть значительное число внутренних или малых контуров автоматического регулирования, содержащихся в радиотехнических угломерных и дальиомерных устройствах, измерителях скорости движения УО относительно пункта управления и цели, исполнительных устройствах и т. д. Радиотехнические устройства систем управления входят в состав контура наведения как отдельные открытые динамические звенья (радиозвенья). Открытыми они называются потому, что на вход радиоприемников могут поступать не только полезные радиосигналы, но и радиопомехи С одной стороны, наличие открытых звеньев является одним из существенных недостатков систем радиоуправления (возможно воздействие специально организованных радиопомех), а с другой стороны, в большинстве случаев только радиотехнические средства позволяют получить высокие точности управления. Технические характеристики системы радиоуправления в целом и ее радиозвеньев тесно связаны между собой. Поэтому при проектировании радиотехнических устройств для системы управления всегда необходимо учитывать их место и значение в замкнутых системах регулирования. 27-2. ПАРАМЕТРЫ РАССОГЛАСОВАНИЯ И КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ПРИ УПРАВЛЕНИИ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ Общие сведения Для каждой плоскости управления параметр рассогласования Д с помощью уравнения,. называемого уравнением рассогласования, однозначно связан в общем случае с координатами пункта управления (ПУ), цели (Ц) и управляемого объекта (УО). Так как через две точки, характеризующие исходный и конечный пункты маршрута УО, можно провести бесконечное количество линий, то число уравнений рассогласования, определяющих отклонение УО от необходимой траектории движения, также будет бесконечным. На практике однако используется небольшое количество уравнений рассогласования. Это связано главным образом с возможностями построения сравнительно простых устройств, предназначенных для измерения величины и знака Д, и с наиболее целесообразными траекториями движения УО Если бы в течение всего времени управления выполнялось условие Д=0, которое принято называть уравнением идеальной связи, то осуществлялось Ьы идеальное наведение. Траекторию, получающуюся при Д=0, именуют опорной или кинематической траекторией. Фактическая траектория всегда отличается от опорной, что обусловливается различными возмущениями, действующими на УО и радиоаппаратуру, а также наличием ииерци-онностей и приборных ошибок у измерителей, счетно-решающего прибора, управляемого объекта и т. д. Каждому конкретному уравнению идеальной связи, которая ограничивает движение УО в процессе его управления, соответствует вполне определенный метод наведения УО, характеризующий по существу тип опорной траектории Опорные траектории подразделяются иа фиксированные и нефиксированные. Фиксированная опорная траектория харктеризуется тем, что ее параметры известны еще до начала движения УО. В соответствии с этим можно считать, что движение по фиксированным опорным траекториям может осуществляться в тех случаях, когда: а) цель и точка старта летательного УО неподвижны относительно земли;. б) точка старта УО неподвижна, а цель (например, Луна, планета и т. д.) перемещается по известному закону; в) точка старта УО перемещается по известной траектории, цель подв 1жна, но на некоторых неответственных участках траектории УО допустимо его движение по заранее рассчитанной программе (например, на участке набора заданной высоты летательным аппаратом при пуске его с корабля и т. п.). Параметры нефиксированных опорных траекторий заранее не могут быть рассчитаны. Такие траектории получаются в тех случаях, когда: а) точка старта неподвижна, а цель является маневрирующей, б) точка старта и цель подвижны и при этом закон движения цели не известен. Параметры рассогласования и кинематические уравнения при наведении по фиксированным опорным траекториям Фиксированн ie траектории существенно отличаются друг от друга для летательных аппаратов с аэродинамическими рулями (самолеты, крылатые ракеты и т. д.) и для баллистических ракет. Рассмотрим сначала параметры рассогласования и кинематические уравнения для УО первого типа. При наведении этих УО осуществляется совмещение центра масс илн направления продольной оси УО с опорной траекторией. Поэтому если опорная траектория фиксирована в обеих плоскостях управления, то параметрами рассогласования могут быть: линейные отклонения центра масс УО от опорной траектории по высоте и курсу; линейное отклонение центра масс УО от опорной траектории по курсу и угловое.отклонение продольной оси УО от заданного направления движения УО в вертикальной плоскости; проекции на вертикальную и горизонтальную плоскости угла, характеризующего направление продольной оси УО относительно опорной траектории. Помимо того, в ряде случаев требуется измерять разность Дг между заданным расстоянием и текущим расстоянием, проходимым УО за время движения. Знание параметра Дг позволяет переводить УО с одной фиксированной опорной траектории на другою. При фиксации опорной траектории только в одной плоскости управления используется один из вышеуказанных параметров рассогласования. Для иллюстрации сказанного определим параметры рассогласования для систем управления крылатыми ракетами класса земля- земля , наведение которых производится по опорной траектории (рис. 27-6), фиксированной по курсу и высоте IJI. 1]. Точками Ос, Ц и Ор обозначены положения места старта, цели и ракеты соответственно. С точкой Ос совпадает начало земной системы координат 0cx3.cb3.c.z3.c. у которой ось ОсЬз.с совпадает с местной вертикалью, а ось 0с23.с направлена на север. Опорная траектория ракеты располагается в плоскости Р0, нормальной к земной поверхности и проходящей через точки 0С и Ц. След плоскости Р0 на земной поверхности представляет собой дугу большого круга, называемую ортодромией. Плоскость Ро расположена под углом рц К ОСИ OcZs.c. По высоте опорная траектория может быть разделена на три участка: ОсА - набор высоты, АВ - горизонтальный полет, ВЦ - снижение (пикирование). В качестве параметра рассогласования Дг при наведении ракеты по курсу целесообразно использовать линейное отклонение ее центра масс, определяемое в системе координат Осхяу гк. При этом ось Ос{/в совпадает с осью ОсУз.с, ось Осхи располагается в плоскости Р0 и направлена по касательной к ортодромии в точке Ос, а ось Осги проводится так, чтобы образовалась правая прямоугольная система координат. Таким образом, Дг = Z. (27-1) На участке Ос.4 набора высоты проекцию продольной оси ракеты на плоскость Осхпуш удобно совмещать с направлением ОсЛ. В соответствии с этим уравнение рас-. согласования для вертикальной плоскости наведения на участке ОсЛ принимает следующий вид: = #0- f>, (27-2) где А$- угол отклонения продольной оси ракеты в плоскости Р от заданного направления. бо -заданный угол наклона продольной оси ракеты в плоскости Р0 к оси ОсХя (©о в общем случае зависит от времени); & - действительный угол наклона проекции продольной оси ракеты на плоскость Р0 Заметим, что угол ©0 характеризует заданное воздействие для системы управления на участке набора высоты. В то же время на систему управления ракетой по курсу, называемую часто системой боковой коррекции, поступает управляющее воздействие, равное нулю. 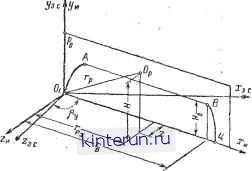 Рис. 27-6. К определению опорной траектории крылатой ракеты. При полете ракеты на участке АВ параметром рассогласования Дн в вертикальной плоскости является линейное отклонение центра масс ракеты от опорной траектории и уравнение рассогласования записывается в форме ДЯ = Я0 - Я, (27 3) где Я0 и Я- заданная и действительная высоты полета ракеты. После того как ракета переходит в режим снижения (участок ВЦ), опять необходимо совмещать проекцию продольной оси ракеты на плоскость Рв с опорной тра екторией. Поэтому остается в силе уравнение рассогласования (27-2). Для того чтобы перевести ракету на снижение в точке В необходимо контролировать текущее расстояние между точками Ос и Ор. В каче стве этого расстояния может быть использована текущая наклонная дальность гр до УО при ее проекции гр1 на плоскость 00хя2и. Тогда, сравнивая гр с заданной наклонной дальностью гзН между точками Ос и В или величину гх и г0, можно сформировать необходимую команду управления при гр=г3ц или Грх-.Го. Отсюда следует, что параметр рассогласования Дг, характеризующий отклонение гр от Гэв или грх от г0, равен: Д =г (27-4) рх- Однако в отличие от-управления по курсу и высоте, когда корректирующие сигналы Ar = r0 - rpx. j
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


