
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств  Параметры в ижения лиши ПУ-цй/ш радиолучом и линией лу-yfl TfoopduMamop Дополнительные сигналы управления Угол между Параметры движения радиолуча Параметры движения линии ПУ-УО Параметры движения ПУ Параметры движения УО г Рис. 27-3. Функциональная схема системы радиоуправления по радиолучу. - пункт управления; РЛС - радиолокационная станция; ИУ - исполнительное устройство (автопилот); РУО - радиоаппаратура на управляемом объекте (УО). радиолокационными- станциями с иными принципами автоматического определения угловых координат целей. В технике радиоуправления системы, с помощью которых производится полет летательного аппарата вдоль равносигиального направления радиолокационной станции с коническим сканированием диаграммы направленности антенны, называются системами управления по радиолучу. Сущность управления по радиолучу сводится к следующему. С помощью РЛС создается равносигнальное направление (РСН). Управляемый объект УО, на котором устанавливается радиоприемник с антенной, направленной в сторону облучающей РЛС, выводится на РСН. Если объект, будучи удаленным от РЛС на некоторое расстояние, находится на РСН, то на вход приемного устройства УО поступают сигналы с неизменной во времени амплитудой. Отклонение УО от равно-сигнального направления приводит к появлению амплитудной модуляции принимаемых сигналов. Как и в радиолокационных угломерных устройствах с коническим сканированием (см. § 22-3), глубина модуляции при этом оказывается пропорциональной величине отклонения (при малых значениях рассогласования) УО от РСН, а фаза огибающей определяет направление отклонения УО. Для того чтобы на выходе приемной установки можно было получить сигнал, характеризующий параметр рассогласования, огибающую модулированных импульсов необходимо сравнивать с опорным напряжением, отображающим закон вращения диаграммы направленности антенны РЛС. Опорное напряжение на УО получается благодаря тому, что импульсы, излучаемые РЛС, модулируются по частоте следования или специальным образом кодируются. Типовая функциональная схема системы управления по радиолучу для случая, когда РСН должно проходить через цель, представлена на рис. 27-3. Координатор рассматриваемой системы состоит из блока РЛС и размещаемой на УО радиоаппаратуры (блок РУО) Входным (заданным) воздействием для РЛС являются параметры движения линии пункт управления-цель, которая проходит через цель и пункт управления ПУ. Пространственное положение этой линии, на которой должен находиться центр масс У О, зависит от относительного движения цели и ПУ. Эта зависимость (как и при рассмотрении систем самонаведения) отображена кинематическим звеном 1. Движение линии пункт управления- цель воспринимается радиолокационной станцией и преобразуется в параметры движения радиолуча (равносигиального направления) . В действительности центр масс УО находится на линии пункт управления-управляемый объект, которая в общем случае не совпадает по направлению с РСН радиолокационной станции. Положение линии пункт управления- управляемый объект зависит от взаимного перемещения ПУ и УО, что отображается кинематическим звеном 2. На это звено воздействуют абсолютные движения ПУ и УО. Угол между равносигнальным направлением (радиолучом) и линией пункт управления--управляемый объект является входным воздействием для радиоаппаратуры, расположенной на управляемом объекте (РУО). В блоке РУО вырабатываются напряжения (токи), пропорциональные линейным отклонениям УО от равносигиального направления в двух взаимно перпендикулярных плоскостях управления. Из этих напряжений (токов) в исполнительном устройстве ИУ (автопилоте) формируются команды управления и управляющие сигналы, под действием которых производится отклонение органов управления так, чтобы УО удерживался на равно--сигнальном направлении. Приборы, расположенные на УО, образуют самостоятельную следующую систему, которая сопоставляет движение РСН и УО. Если с помощью системы управления по радиолучу УО должен наводиться в упрежденную точку встречи, то помимо РЛС сопровождения цели необходима радиолокационная станция управления. Радиозоны, создаваемые радионавигационными устройствами, подразделяются на лннни, плоскости и поверхности по ложения. Плоскость (радиоплоскость) и поверхность (радиоповерхность) положения определяются геометрическим местом находящихся в одной плоскости или на поверхности точек в которых по крайней мере один из параметров радиосигналов (амплитуда на выходе радиоприемника, фаза и т. д.) остается неизменным. Линия положения задается как геометрическое место точек пересечения двух плоскостей или поверхностей положения. Для создания радиоплоскости могут быть использованы различные радионавигационные системы. Наиболее просто радно-плоскость образуется с помощью радиомаяка, у которого диаграмма направленности передающей антенны периодически переключается относительно выбранного направления и производится соответствующее изменение параметров модуляции у излучаемых сигналов. Простейшим видом радиоповерхности является полусфера, которая может быть образована дальномерной радионавигационной системой. Функциональные схемы систем управления по радио зонам, создаваемым радионавигационными устройствами, могут быть весьма разнообразны. Однако их отличие от схем для систем управления по радиолучу будет состоять преимущественно в структуре и функциях, выполняемых отдельными устройствами координатора. Системы командного радиоуправления характеризуются тем, что параметр рассогласования формируется на пункте управления. Различают системы командного радиоуправления первого, второго и третьего видов. В системах первого вида сигналы заданного и действительного режимов движения вырабатываются на пункте управления. В системах второго вида сигналы, характеризующие заданный и действительный режимы движения управляемого объекта, образуются на самом управляемом объекте, откуда они по каналу системы передачи данных направляются на пункт управления для формирования сигнала Ди. Системы третьего вида предназначаются для наведения УО на сам пункт управления (например, при стыковке космических кораблей). Такой способ управления часто называют управлением на себя. Функциональная схема системы командного радиоуправления первого вида, предназначенная для управления движением летательных аппаратов, показана на рис. 27-4, а. Заданные координаты (параметры движения) управляемого объекта определяются движением линии пункт управления- 36-1248 цель, положение которой в каждый момент времени связано с координатами цели и ПУ в заранее выбранной системе координат. То обстоятельство, что в системе управления * используются сведения о взаимном расположении цели и ПУ, а не об их абсолютных движениях в отдельности, на рис. 27-4, а отображено с помощью кинематического звена 1. Измеритель координат цели (ИКЦ) формирует сигналы, которые характеризуют текущие координаты цели относительно ПУ Если цель неподвижна, то вместо ИКЦ используется программное устройство, формирующее сигналы о заданной траектории движения УО. В ряде случаев ИКП может распота-гаться на некотором расстоянии от ПУ. В такой ситуации входным воздействием для ИКП будет движение линии цель - ИКЦ и выходные сигналы ИКЦ должны транслироваться на пункт управления. Для трансляции могут использоваться не только радиотехнические, но и проводные средства связи (на рис. 27-4,0 не показаны). В результате обработки выходных сигналов системы трансляции на пункте управления, положение которого относительно ИКЦ известно, вырабатываются напряжения (токи), характеризующие движение линии пункт управления - цель и определяющие заданные координаты (параметры движения) управляемого объекта. Задача измерителя координат УО заключается в определении координат (параметров движения), соответствующих действительному движению УО. Если этот измеритель располагается вне пункта управления, то его связь со счетно-решающим прибором или индикатором в автоматических и полуавтоматических системах соответственно осуществляется с помощью системы тоансляции. Прн размещении рассматриваемого измерителя на пункте управления необходимость в системе трансляции отпадает. Кинематическое звено 2, на которое воздействуют абсолютные движения ПУ и УО, характеризует движение линии пункт управления - управляемый объект. Измеритель координат цели, системы трансляции (при их участии в работе системы радиоуправления) и счетно-решающий прибор образуют координатор автоматической системы командного радиоуправления первого вида. Если система является полуавтоматической, то в состав координатора вместо СРП включается индикатор. На выходе СРП автоматической системы формируются напряжения (токи) или специальные коды, которые отображают параметры рассогласования для различных плоскостей управления. Эти сигналы преобразуются устройством формирования команд УФК и с помощью командной радиолинии управления (КРУ) передаются на управляемый объект. Если система радиоуправления является полуавтоматической, то измеренные значения параметров рассогласования вырабаты- Параметры два- жения цели - I Индикатор Оператор Датчик команд .Дополнительны? сигналы, управления 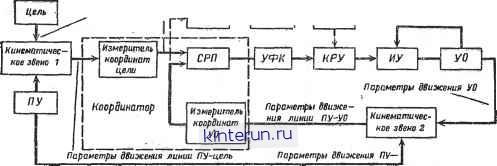 цель Параметры движения цели <0 Кинематическое звено 1 Измерительное устройство -* ! Индикатор Координатор Оператор Дополнительные сигналы управления \ Параметры движения линии УО-цель Параметры движения УО Параметры движения -уоi Параметры дВижения Пу Кинематичес кое звено Дополнительные сигналы управления Координатор УФК -КРУ - {~ УО -J- Параметра движения УО Рис. 27-4. Функциональные схемы систем командного радиоуправления для трех основных случаев- ФК ~- устройство формирования команд; КРУ- командная радиолиния управления; детальные обозначения те же, что и в предыдущих схемах. ваются оператором по сигналам индикатора (стрелочного, электроннолучевого и т. д.). При необходимости корректировать движение УО оператор воздействует на датчик команд, связанный с передающей установкой КРУ- Возможно и такое построение полуавтоматической системы управления, когда оператор определяет и вводит в СРП лишь необходимые координаты цели, которые совместно с получаемыми автоматически сведениями об УО преобразуются с помощью СРП в параметры рассогласования. Радиосигналы, принимаемые приемной установкой КРУ, которая размещается на УО, преобразуются в напряжения (токи). Под действием этих напряжений происходит работа исполнительного устройства и, следовательно, изменение режима движения УО. Обычно требуется управлять несколькими различными параметрами управляемого объекта. Поэтому соответствующие измерители координат и КРУ, как правило, должны быть многоканальными. Система командного радиоуправления второго вида в составе функциональной схемы (рис. 27-4, б) имеет размещаемое на УО измерительное устройство, формирующее сигналы о заданном и действительном режимах движения УО. Выходные сигналы этого устройства с помощью системы трансляции (системы передачи данных СПД), которая является обязательным элементом рассматриваемой системы, транслируется на индикатор (например, экран телевизионного приемника). Действие команд, формируемых оператором и передаваемых с помощью КРУ на УО, создает необходимый режим движения УО. Кинематическое звено преобразует абсолютные движения цели и УО в движение линии УО - цель. Сравнивая схемы на рис. 27-4, б и 27-2,а, можно заметить некоторую общность и различие между системами командного управления второго вида и системами самонаведения. Принципиальное различие между этими системами заключается в необходимости трансляции данных с УО на пункт управления в системах командного радиоуправления. Последнее обычно обусловливается невозможностью измерения параметра рассогласования непосредственно на УО, вследствие отсутствия условий, при которых
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


